时间:2024.10.29
参考资料:
《零死角玩转STM32》“USART--串口通信”章节
编程是从GPIO输出-使用固件库点亮LED灯的基础上开始
一、学习内容
1、STM32串口初始化结构体和固件库
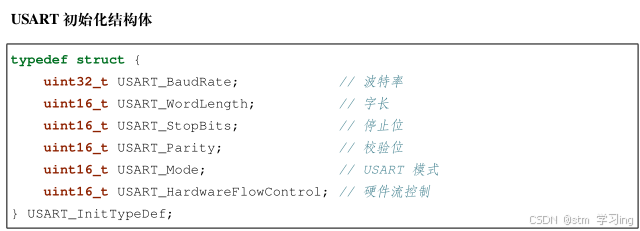
1.1 USART初始化结构体
/**
* @brief USART Init Structure definition
*/
typedef struct
{
uint32_t USART_BaudRate; /*!< This member configures the USART communication baud rate.
The baud rate is computed using the following formula:
- IntegerDivider = ((PCLKx) / (16 * (USART_InitStruct->USART_BaudRate)))
- FractionalDivider = ((IntegerDivider - ((u32) IntegerDivider)) * 16) + 0.5 */
uint16_t USART_WordLength; /*!< Specifies the number of data bits transmitted or received in a frame.
This parameter can be a value of @ref USART_Word_Length */
uint16_t USART_StopBits; /*!< Specifies the number of stop bits transmitted.
This parameter can be a value of @ref USART_Stop_Bits */
uint16_t USART_Parity; /*!< Specifies the parity mode.
This parameter can be a value of @ref USART_Parity
@note When parity is enabled, the computed parity is inserted
at the MSB position of the transmitted data (9th bit when
the word length is set to 9 data bits; 8th bit when the
word length is set to 8 data bits). */
uint16_t USART_Mode; /*!< Specifies wether the Receive or Transmit mode is enabled or disabled.
This parameter can be a value of @ref USART_Mode */
uint16_t USART_HardwareFlowControl; /*!< Specifies wether the hardware flow control mode is enabled
or disabled.
This parameter can be a value of @ref USART_Hardware_Flow_Control */
} USART_InitTypeDef;
形参定义和可选的值
/** @defgroup USART_Word_Length
* @{
*/
#define USART_WordLength_8b ((uint16_t)0x0000)
#define USART_WordLength_9b ((uint16_t)0x1000)
#define IS_USART_WORD_LENGTH(LENGTH) (((LENGTH) == USART_WordLength_8b) || \
((LENGTH) == USART_WordLength_9b))
/**
* @}
*/
/** @defgroup USART_Stop_Bits
* @{
*/
#define USART_StopBits_1 ((uint16_t)0x0000)
#define USART_StopBits_0_5 ((uint16_t)0x1000)
#define USART_StopBits_2 ((uint16_t)0x2000)
#define USART_StopBits_1_5 ((uint16_t)0x3000)
#define IS_USART_STOPBITS(STOPBITS) (((STOPBITS) == USART_StopBits_1) || \
((STOPBITS) == USART_StopBits_0_5) || \
((STOPBITS) == USART_StopBits_2) || \
((STOPBITS) == USART_StopBits_1_5))
/**
* @}
*/
/** @defgroup USART_Parity
* @{
*/
#define USART_Parity_No ((uint16_t)0x0000)
#define USART_Parity_Even ((uint16_t)0x0400)
#define USART_Parity_Odd ((uint16_t)0x0600)
#define IS_USART_PARITY(PARITY) (((PARITY) == USART_Parity_No) || \
((PARITY) == USART_Parity_Even) || \
((PARITY) == USART_Parity_Odd))
/**
* @}
*/
/** @defgroup USART_Mode
* @{
*/
#define USART_Mode_Rx ((uint16_t)0x0004)
#define USART_Mode_Tx ((uint16_t)0x0008)
#define IS_USART_MODE(MODE) ((((MODE) & (uint16_t)0xFFF3) == 0x00) && ((MODE) != (uint16_t)0x00))
/**
* @}
*/
/** @defgroup USART_Hardware_Flow_Control
* @{
*/
#define USART_HardwareFlowControl_None ((uint16_t)0x0000)
#define USART_HardwareFlowControl_RTS ((uint16_t)0x0100)
#define USART_HardwareFlowControl_CTS ((uint16_t)0x0200)
#define USART_HardwareFlowControl_RTS_CTS ((uint16_t)0x0300)
#define IS_USART_HARDWARE_FLOW_CONTROL(CONTROL)\
(((CONTROL) == USART_HardwareFlowControl_None) || \
((CONTROL) == USART_HardwareFlowControl_RTS) || \
((CONTROL) == USART_HardwareFlowControl_CTS) || \
((CONTROL) == USART_HardwareFlowControl_RTS_CTS))
/**
* @}
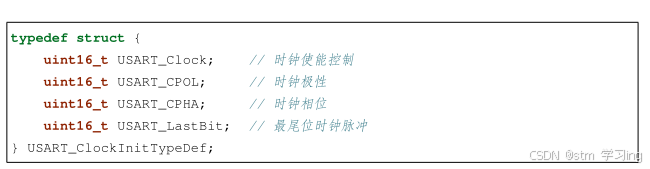
*/ 1.2同步时钟初始化结构体
时钟用于同步通信,一般我们使用异步通信
同步时钟初始化结构体
/**
* @brief USART Clock Init Structure definition
*/
typedef struct
{
uint16_t USART_Clock; /*!< Specifies whether the USART clock is enabled or disabled.
This parameter can be a value of @ref USART_Clock */
uint16_t USART_CPOL; /*!< Specifies the steady state value of the serial clock.
This parameter can be a value of @ref USART_Clock_Polarity */
uint16_t USART_CPHA; /*!< Specifies the clock transition on which the bit capture is made.
This parameter can be a value of @ref USART_Clock_Phase */
uint16_t USART_LastBit; /*!< Specifies whether the clock pulse corresponding to the last transmitted
data bit (MSB) has to be output on the SCLK pin in synchronous mode.
This parameter can be a value of @ref USART_Last_Bit */
} USART_ClockInitTypeDef;stm32f10x_usart.c->stm32f10x_usart.h ->找到对应的结构体定义和形参定义
1.3串口固件库函数
1.3.1编程时需要用到的固件库函数
1.串口初始化函数
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);这个函数的功能是将我们写入串口的值写到相应的寄存器里
2.中断配置函数
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);3.串口使能函数
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);主要是控制UE这个大门的开关
4.数据发送函数
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);5.数据接收函数
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);6.中断状态位获取函数
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT);判断中断是否产生
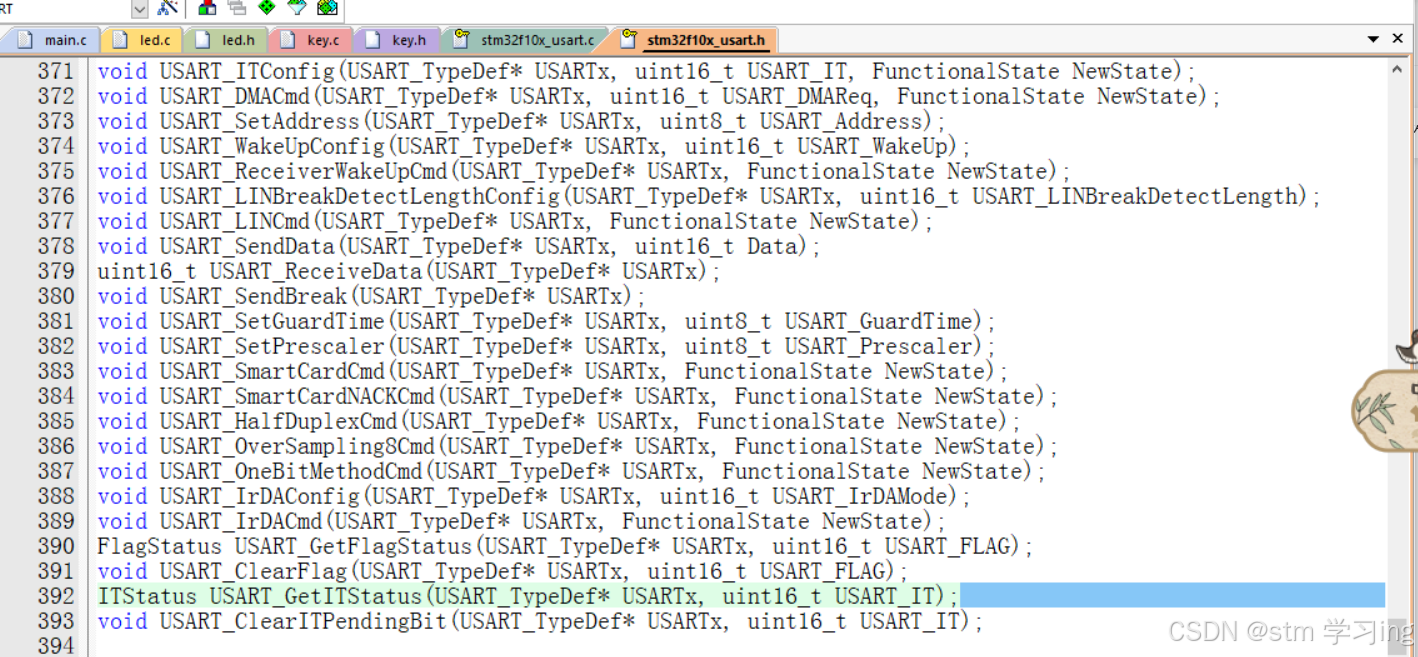
1.3.2 stm32f10x_usart.h串口固件库函数的声明
void USART_DeInit(USART_TypeDef* USARTx);
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
void USART_StructInit(USART_InitTypeDef* USART_InitStruct);
void USART_ClockInit(USART_TypeDef* USARTx, USART_ClockInitTypeDef* USART_ClockInitStruct);
void USART_ClockStructInit(USART_ClockInitTypeDef* USART_ClockInitStruct);
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);
void USART_DMACmd(USART_TypeDef* USARTx, uint16_t USART_DMAReq, FunctionalState NewState);
void USART_SetAddress(USART_TypeDef* USARTx, uint8_t USART_Address);
void USART_WakeUpConfig(USART_TypeDef* USARTx, uint16_t USART_WakeUp);
void USART_ReceiverWakeUpCmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_LINBreakDetectLengthConfig(USART_TypeDef* USARTx, uint16_t USART_LINBreakDetectLength);
void USART_LINCmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
void USART_SendBreak(USART_TypeDef* USARTx);
void USART_SetGuardTime(USART_TypeDef* USARTx, uint8_t USART_GuardTime);
void USART_SetPrescaler(USART_TypeDef* USARTx, uint8_t USART_Prescaler);
void USART_SmartCardCmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_SmartCardNACKCmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_HalfDuplexCmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_OverSampling8Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_OneBitMethodCmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_IrDAConfig(USART_TypeDef* USARTx, uint16_t USART_IrDAMode);
void USART_IrDACmd(USART_TypeDef* USARTx, FunctionalState NewState);
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
void USART_ClearFlag(USART_TypeDef* USARTx, uint16_t USART_FLAG);
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT);
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
大致位置
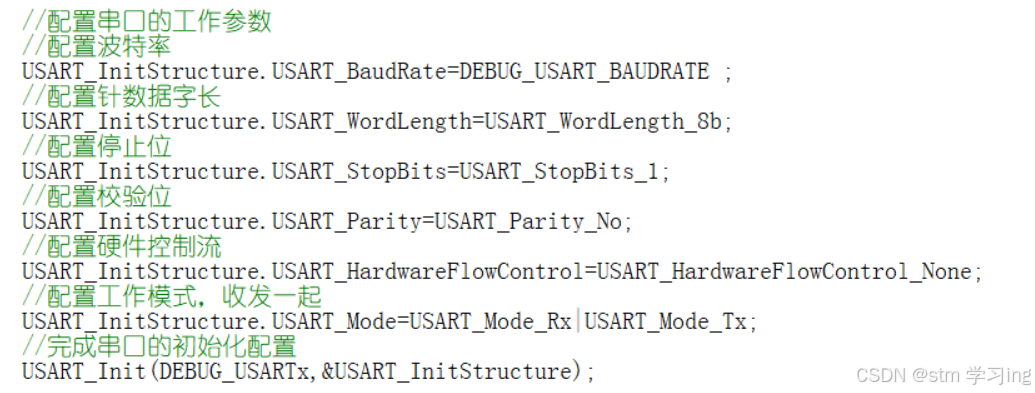
2、串口发送和接收代码
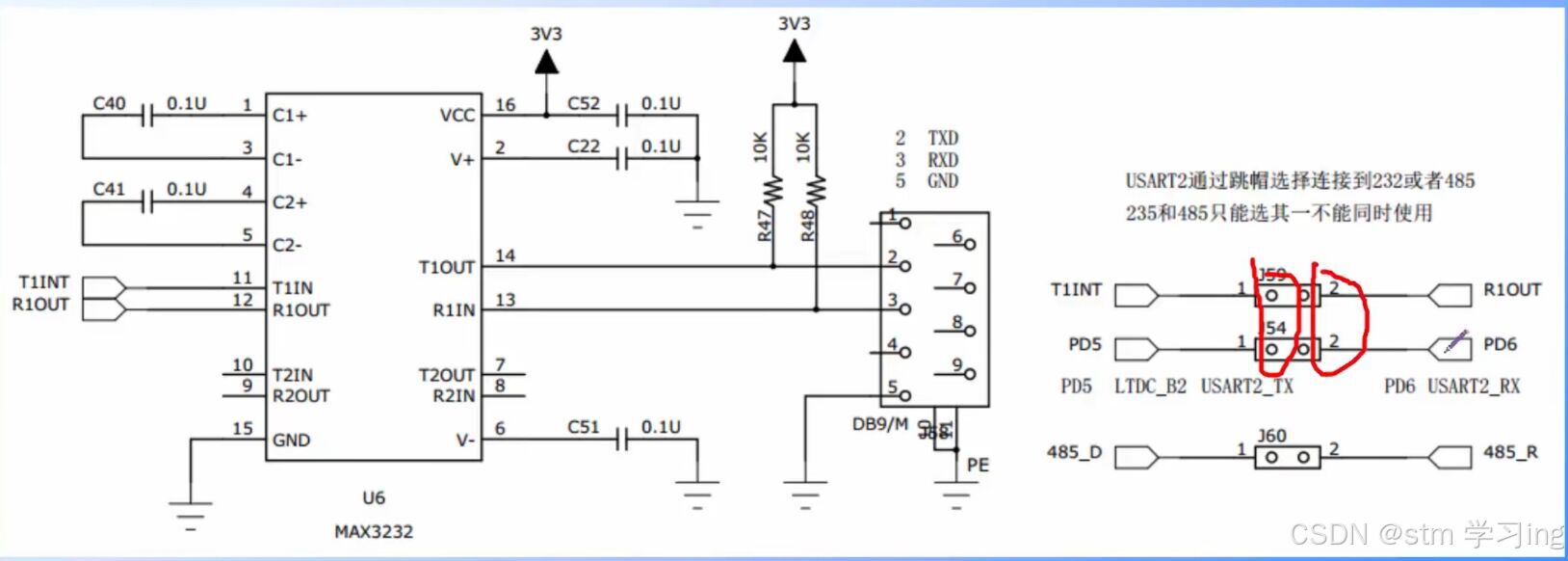
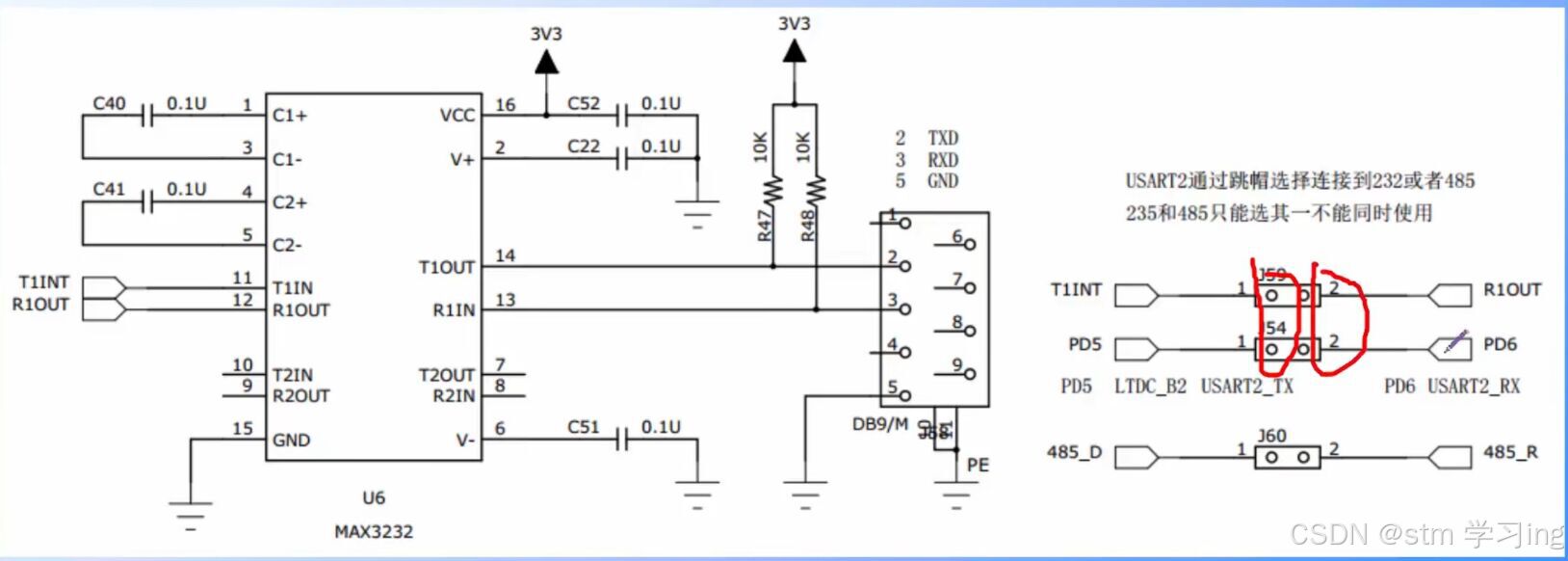
2.1硬件设计
2.1.1TTL电平转USB电平
(使用时电脑上记得安装CH340驱动)
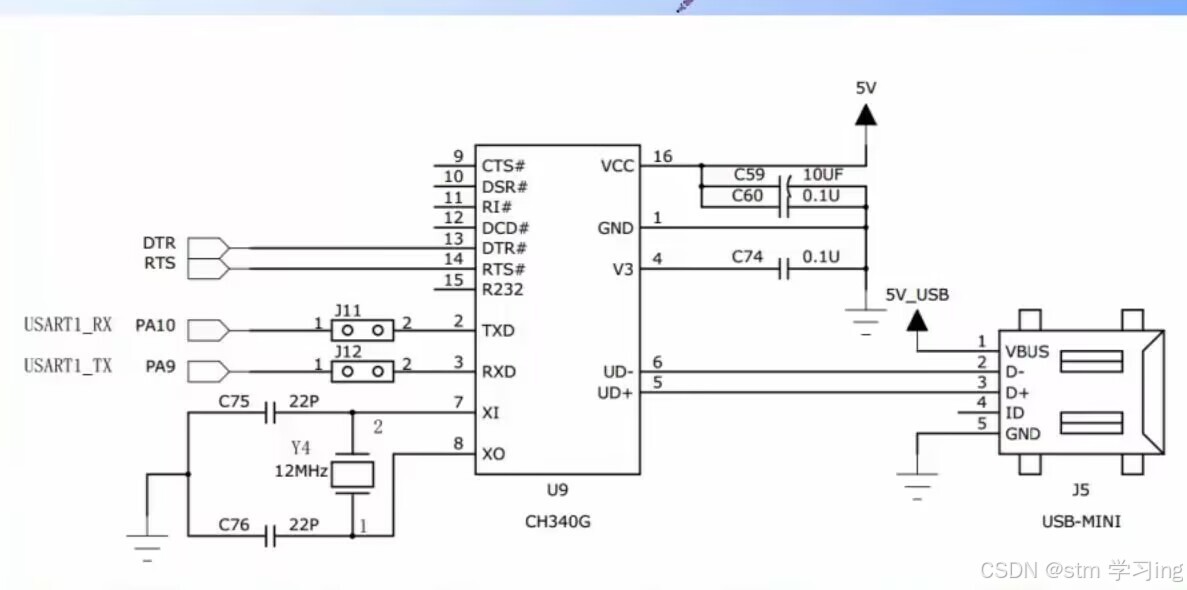
在选择各个串口时,注意调帽
二、知识点和小技巧
1、CH340驱动所在位置
A盘(资料库)--4开发软件--USB转串口驱动-CH340-安装CH340SER.EXE
2、调帽
在选择各个串口时,注意调帽