文章目录
蓝桥杯嵌入式
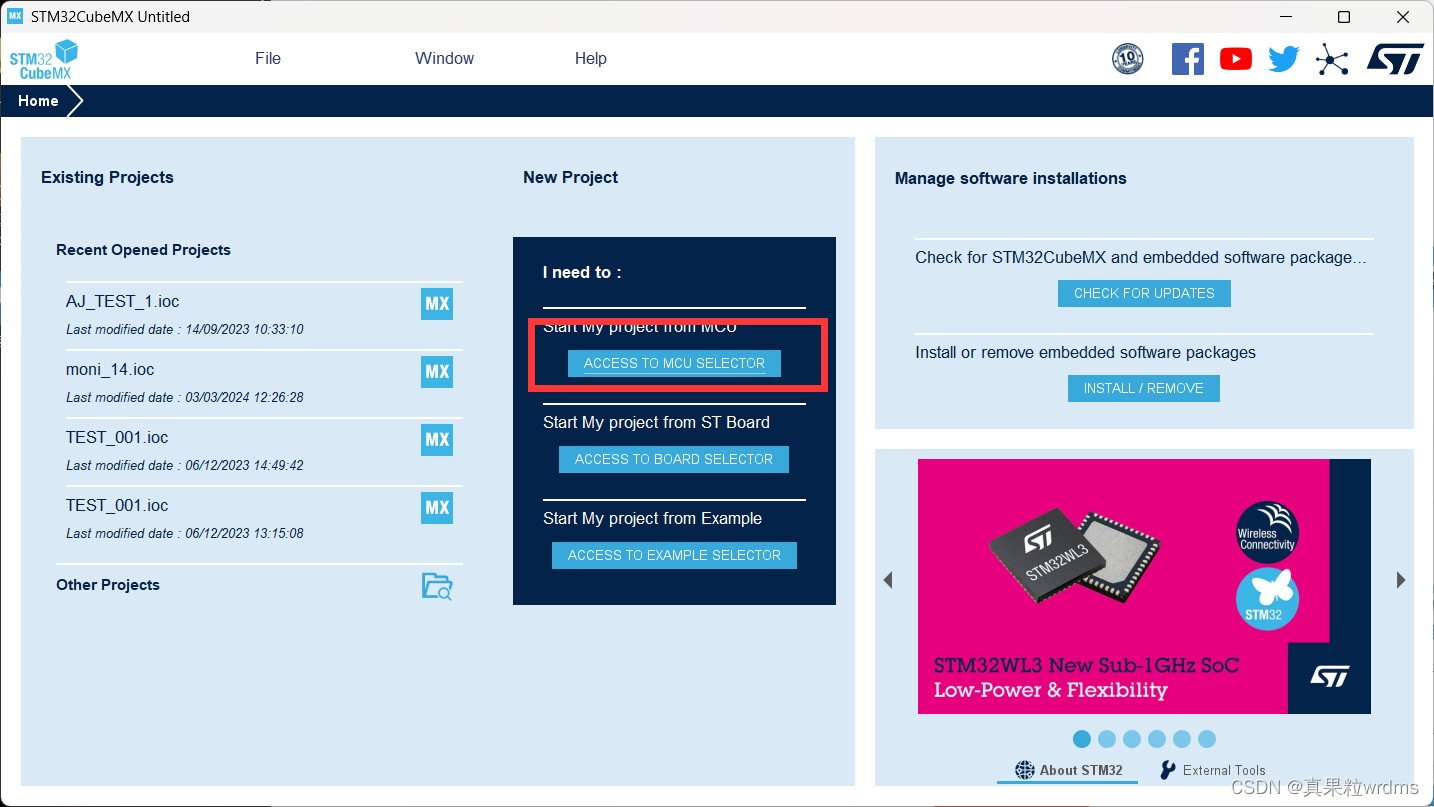
0.初始工程创建
-
打开CubeMX
-
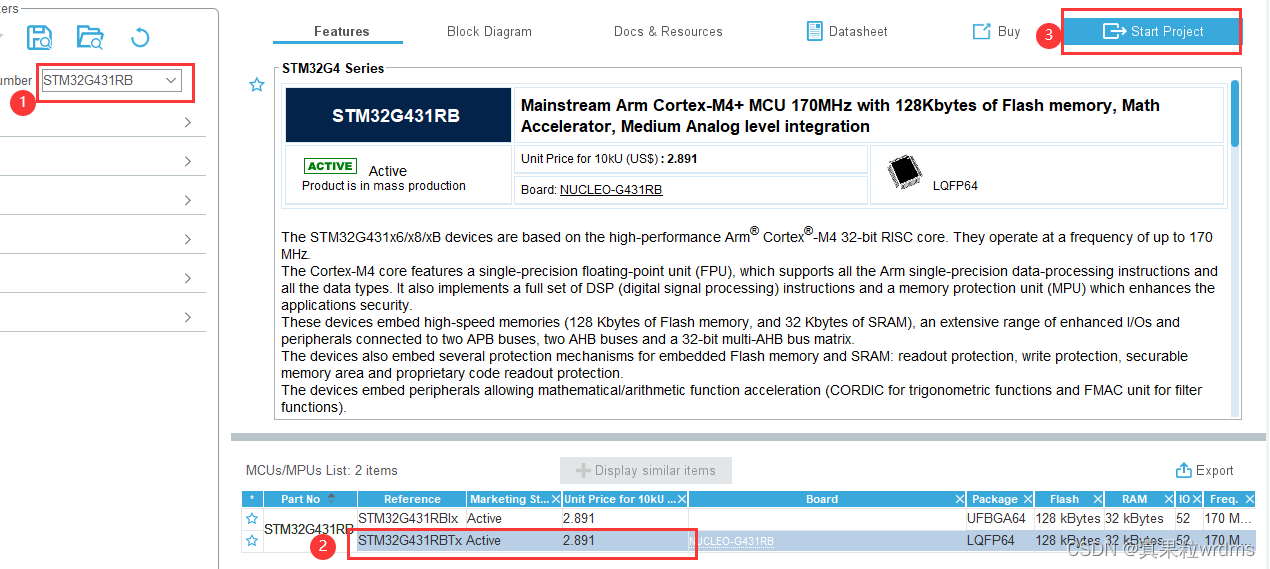
输入搜索芯片型号
-
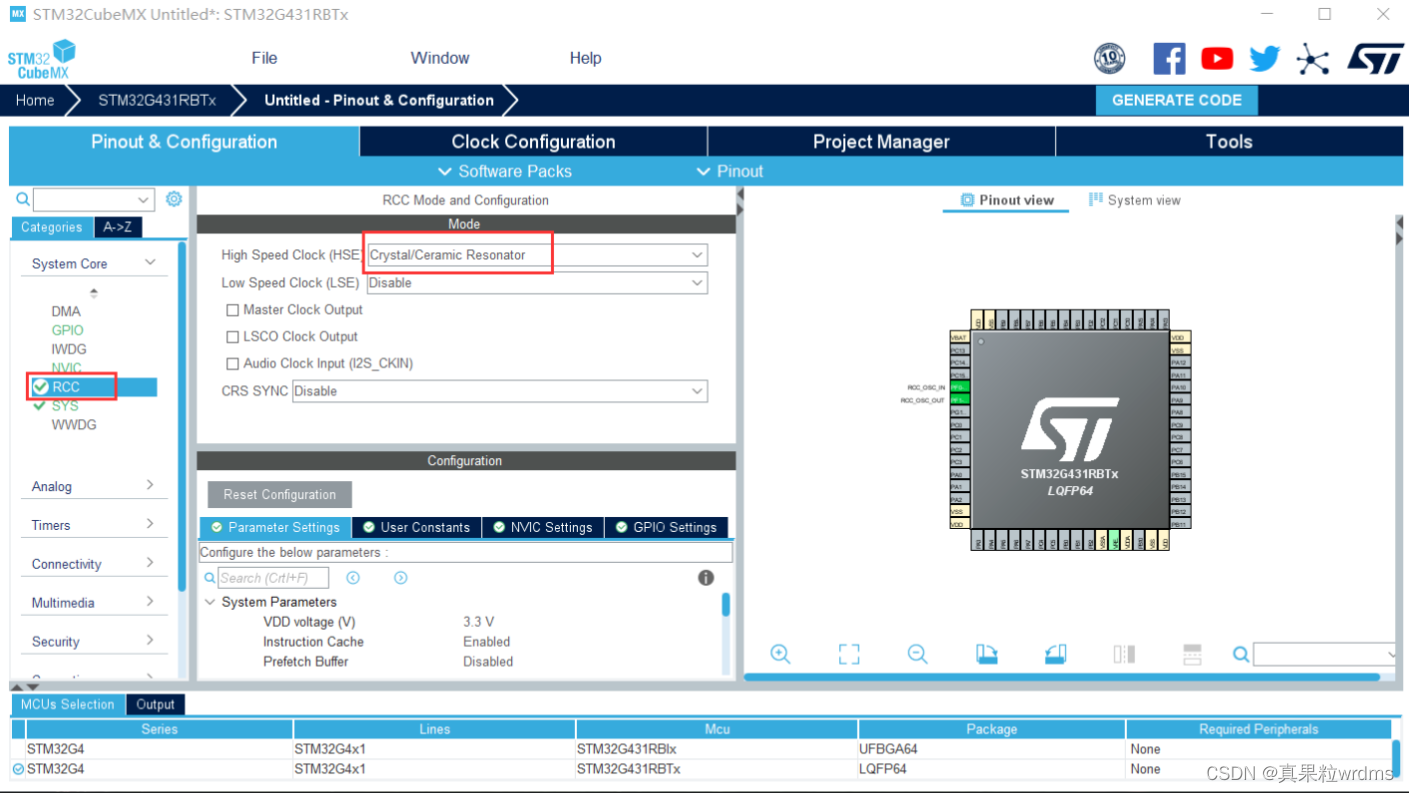
开启时钟
-
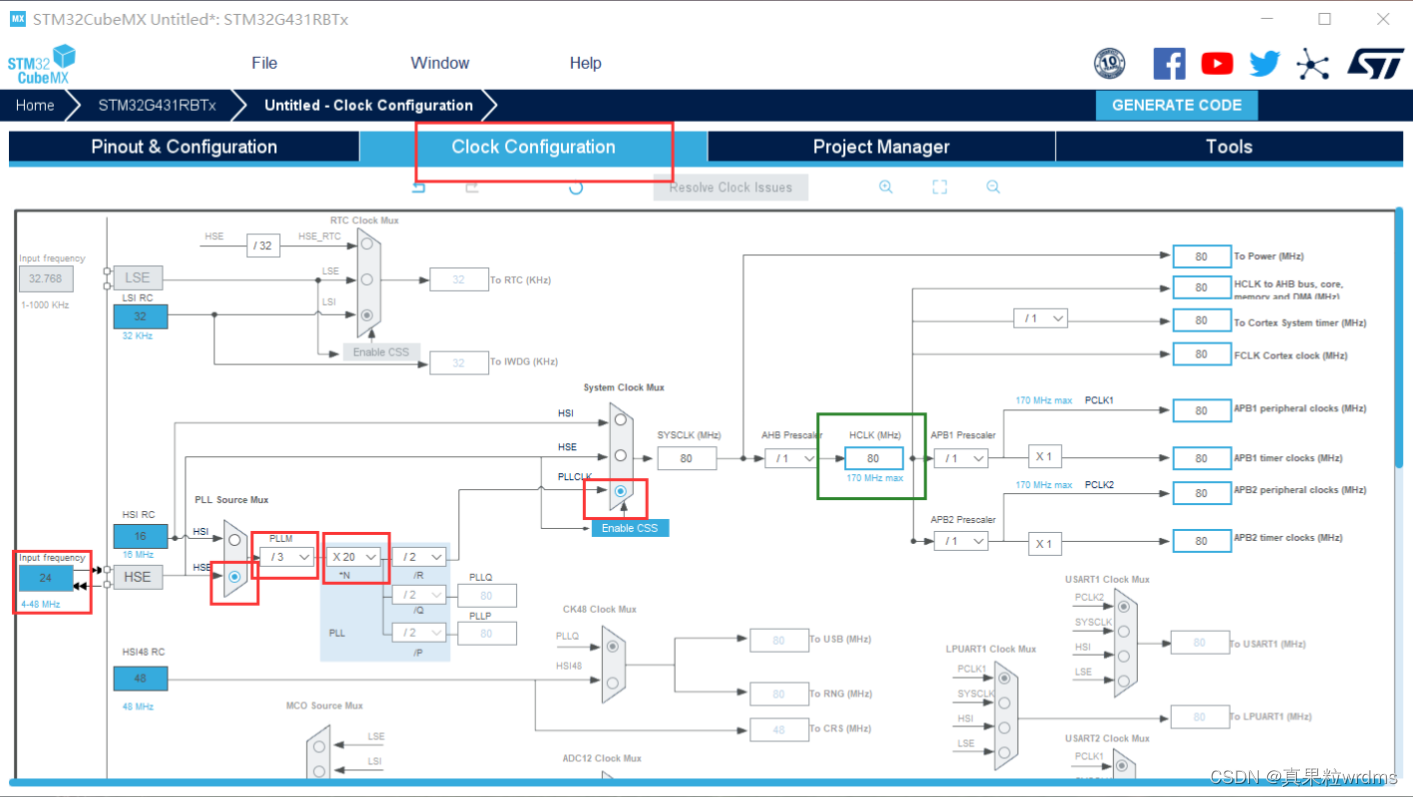
时钟初始化设置,最后绿色框处位80,即设置正确
-
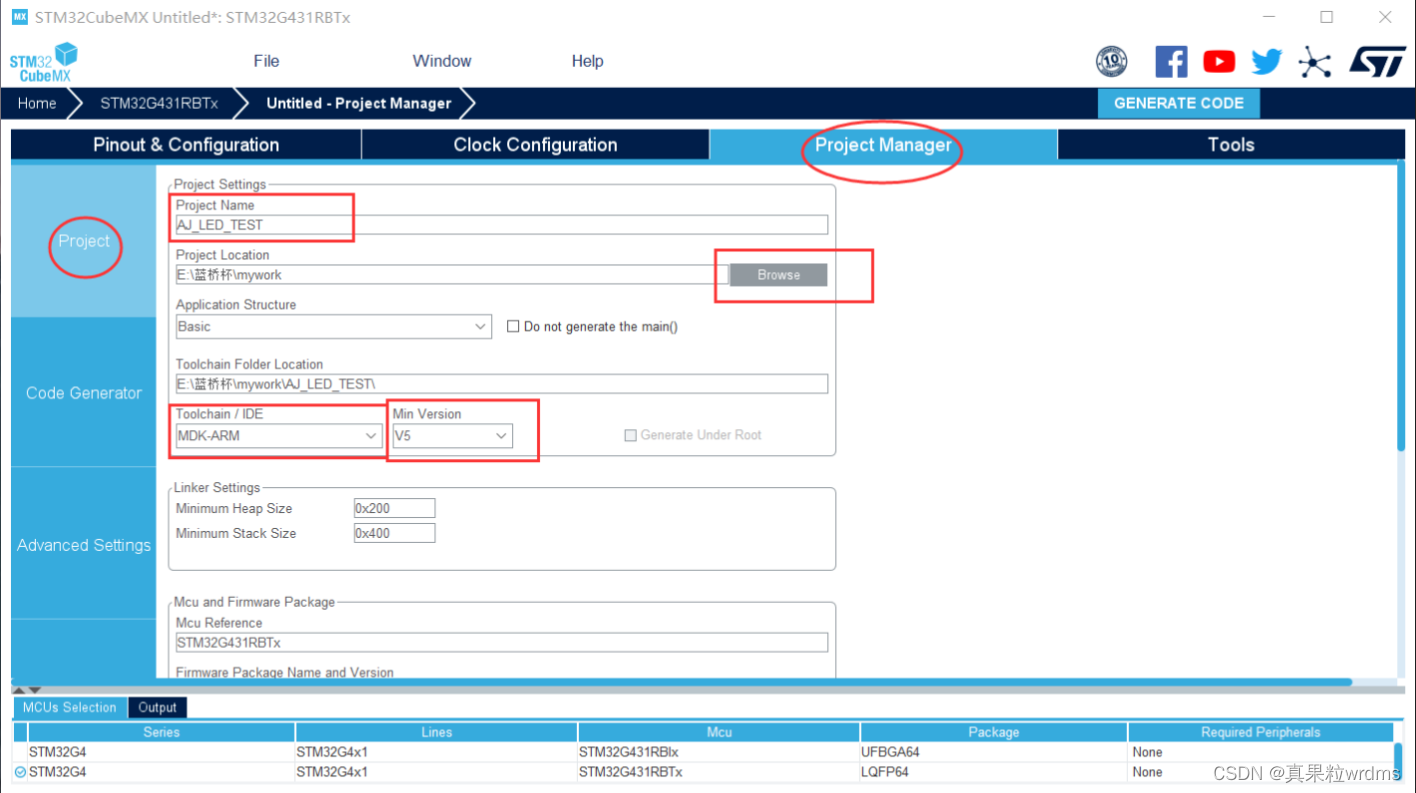
设置工程名字(不能有中文),文件保存位置,工具链(MDK-ARM)及最低版本(V5)
-
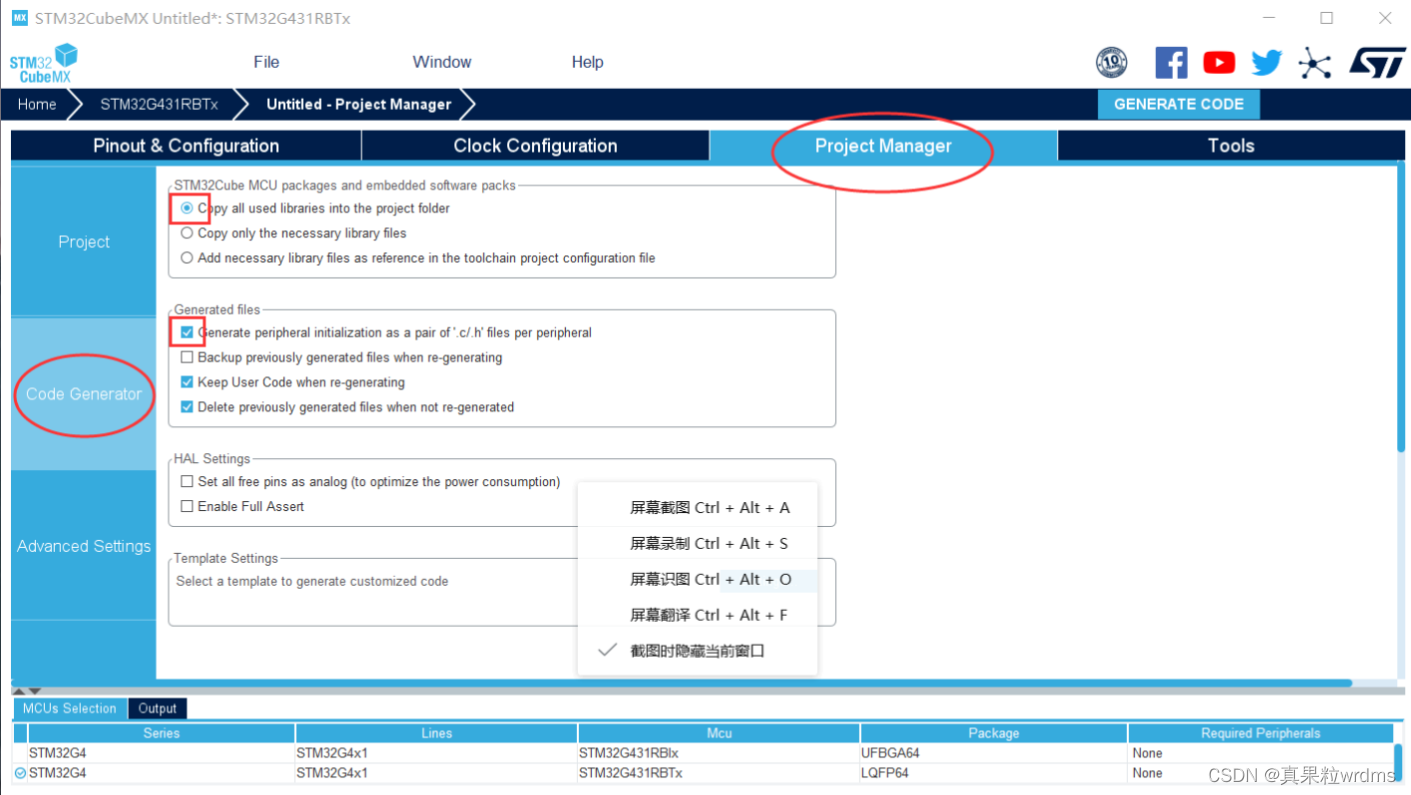
代码生成设置,勾选生成 ‘.c/.h’ 文件
-
点击右上角Generate Code生成工程文件
1.小灯点亮(基础)
初始配置
-
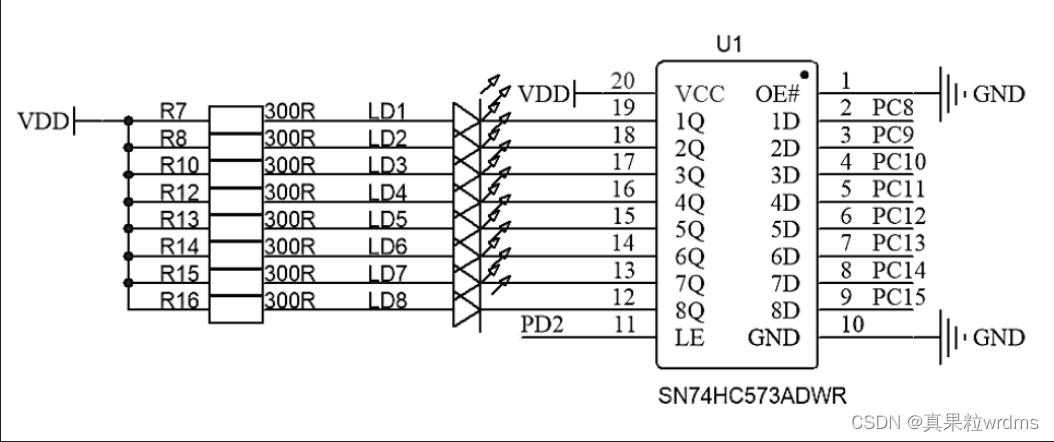
确定八个小灯和一个锁存器的管脚
- 小灯管脚:PC8-PC15
- 锁存器管脚:PD2
-
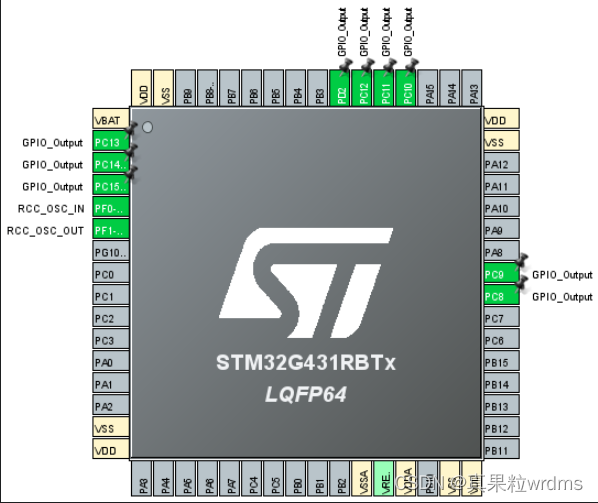
在CubeMX中初始化相应管脚
模式为GPIO_Output
-
点击右上角Generate Code生成代码
新工程模块创建
-
新建 led.c和led.h文件,led.c保存到Core/Src中,led.h保存到Core/Inc中
-
文件基础内容编写
led.c
#include "led.h"led.h
#ifndef _LED_H_ #define _LED_H_ #endif为防止文件被重复引用
-
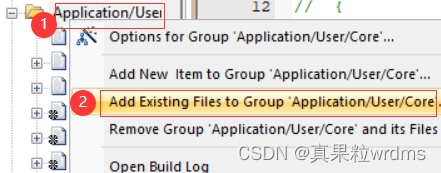
将led.c加入到工程中
-
将led.c加入组
-
编译,编译后led.h便会自动加入到led.c下面
-
程序代码
led模块内容
led.c
#include "led.h"
#include "main.h"
unsigned int LED = 0; //无符号型 int 全局变量
/*
@led_turn_on :控制小灯点亮
@para num :小灯的序号
*/
void led_turn_on(int num)
{
LED = LED | (1<<num);
}
/*
@led_turn_off :控制小灯熄灭
@para num :小灯的序号
*/
void led_turn_off(int num)
{
LED = LED & (~(1<<num));
}
/*
@led_star:小灯闪烁
@n:小灯的序号
*/
int star_time = 0;
void led_star(int n)
{
if(star_time<uwTick)
{
star_time = uwTick +100;
LED ^= (1<<n);
}
}
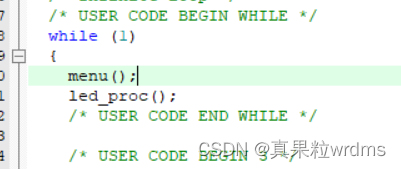
void led_proc(void)//放入main.c的while循环中
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);//GPIOC所有管脚电平置1
HAL_GPIO_WritePin(GPIOC,LED<<8,GPIO_PIN_RESET);//因为小灯管脚从PC8开始,所以左移8位
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);//打开锁存器
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);//关闭锁存器
}
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);- 库函数位置:/stm32g4xx_hal_gpio.h / Group2 / 第2个
屏幕出现了花屏现象(屏幕中会出现小白点、短线等),产生花屏现象的原因是在编写代码时将LED相关代码放在中断中,这样的操作会导致LCD驱动代码被打断,将错误的值写入LCD。
LCD、LED共用PC端口高8位,提醒大家在中断中尽量不要操作LED端口(PC8-15),可以使用标志位、查询的方式实现对LED的操作。
*所以要把*led_proc()放入main.c的while循环中
led.h
#ifndef _LED_H_ //判断是否没定义_LED_H_,若没定义则执行下面代码
#define _LED_H_ //定义_LED_H_
void led_turn_on(int num);
void led_turn_off(int num);
#endif
程序解释
逻辑符号
-
<< 左移 将数转换成二进制数 然后左移
例:1左移2位
(1<<2) = 4
-
| 逻辑或 将数转换成二进制 然后进行或运算
例:(0010 | 0000) = 0010 有1为1
-
& 逻辑与 将数转换成二进制 然后相与
例:(0010 & 0000) = 0000 有0为0
4.~ 逻辑反 将数转换成二进制
例:~(0010) = 1101 0变成1,1变成0
举例解析
int NUM = 256; //256 转为二进制是 0001 0000 0000 HAL_GPIO_WritePin(GPIOC,NUM,GPIO_PIN_RESET); 第九位是1,所以该函数操作第九位管脚的电平,GPIO_PIN_RESET 即置为低电平
点灯
LED = 32;num = 3; LED = LED | (1<<num); LED = 0010 0000 因为int型数据大小为4字节,1字节=8比特,所以为32位,此处省略前24位
(1<<num) = 0000 1000
LED = (0010 0000)|(0000 1000)
最后LED = 0010 1000
熄灯
LED = 32;num = 5; LED = LED & (~(1<<num)); LED = 0010 0000
~(1<<num) = 1101 1111
LED &(~ (1<<num)) = (0010 0000)&(1101 1111)
最后LED=0000 0000
调用
main.c
-
引入led模块
-
调用函数
注意:main.c 中的代码一定要写在
/* USER CODE BEGIN* /和/ * USER CODE END*/之间,否则再用CubeMX生成代码之后,写在外面的代码会被清除
编译下载,观察小灯
2.LCD屏幕
驱动代码移植
-
文件路径:嵌入式资源数据包_STM32G4_2023\竞赛平台\6-液晶驱动参考程序\MDK5_LCD_HAL\Inc 在这里找到 fonts.h 和 lcd.h
-
文件路径:嵌入式资源数据包_STM32G4_2023\竞赛平台\6-液晶驱动参考程序\MDK5_LCD_HAL\Src 在这里找到 lcd.c
-
将这三个文件分别复制保存到Core/Src 和 Core/Inc中中
-
然后在Keil中将lcd.c加入工程
程序代码
初始化
main.c 中 while(1) 之前
LCD_Init();//lcd初始化
LCD_SetTextColor(Black);//设置字体颜色
LCD_SetBackColor(White);//设置背景颜色
LCD_Clear(White);//白色清屏
- 库函数位置:/ lcd.h
使用:打印字和变量
main.c while(1)中
char text[50] = {0};
int num = 123;
sprintf(text,"Hellow World");
LCD_DisplayStringLine(Line1,(unsigned char *)text);
sprintf(text,"num = %d",123);
LCD_DisplayStringLine(Line2,(unsigned char *)text);
注意:sprintf 需要声明头文件 <stdio.h>
编译下载,观察屏幕
3.定时中断
定时器
STM32G431RB拥有10个定时器,包括基本定时器、通用定时器和高级控制定时器。
- 基本定时器:2个,分别是TIM6和TIM7。这些定时器的功能相对较为基础,通常用于简单的时间计数或者作为中断源使用。
- 通用定时器:6个,分为两组,第一组是TIM2,TIM3,TIM4,第二组是TIM15,TIM16,TIM17。第一组的通用定时器功能齐全,可以用于多种场合,如PWM输出、输入捕获等。而第二组的通用定时器通道数量较少,可能只有1个或2个通道,适用于需求不那么复杂的场景。
- 高级控制定时器:2个,即TIM1和TIM8。这些定时器提供了更多的功能和更高的灵活性,适合用于电机控制等需要高精度和复杂时序控制的应用场景。
初始配置
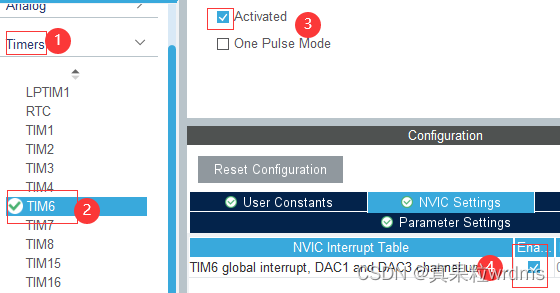
以TIM6为例
-
开启时钟,使能中断
-
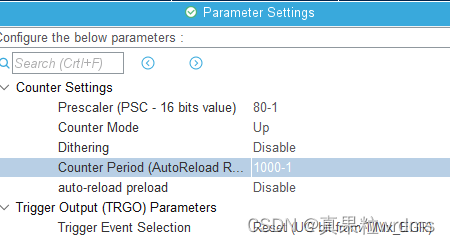
设置时钟参数
- 预分频值 Prescaler 80-1
- 重装载值 Counter Period 1000-1
- 占空比值 Pulse 占空比值/重装载值 = 占空比
- (TIM6为基本定时器,不用设置占空比值)
-
晶振频率为80Mhz = 80 000 000hz
-
分频后频率 = 晶振频率 预分频值 + 1 = 80 , 000 , 000 80 = 1 , 000 , 000 Hz 分频后频率 = \frac{晶振频率}{预分频值 + 1} = \frac{80,000,000}{80} = 1,000,000 \text{ Hz} 分频后频率=预分频值+1晶振频率=8080,000,000=1,000,000 Hz
-
工作频率 = 分频后频率 1000 = 1 , 000 , 000 1000 = 1 , 000 H z 工作频率 = \frac{分频后频率}{1000} = \frac{1,000,000}{1000} = 1,000 { Hz} 工作频率=1000分频后频率=10001,000,000=1,000Hz
-
工作频率为1000Hz,即每秒执行中断1000次
- 点击右上角Generate Code生成代码
程序代码
main.c
HAL_TIM_Base_Start_IT(&htim6);//开启时钟
- 库函数位置:stm32g4xx_hal_tim.h / Group4 / Interrupt
- 注意:要写在**MX_TIM6_Init();**之后
方法1:
生成代码后,在stm32g4xx_it.c中找到void TIM6_DAC_IRQHandler(void),将想写的代码写入函数内;
stm32g4xx_it.c
/**
* @brief This function handles TIM6 global interrupt, DAC1 and DAC3 channel underrun error interrupts.
*/
void TIM6_DAC_IRQHandler(void)
{
/* USER CODE BEGIN TIM6_DAC_IRQn 0 */
time6++;
/* USER CODE END TIM6_DAC_IRQn 0 */
HAL_TIM_IRQHandler(&htim6);
/* USER CODE BEGIN TIM6_DAC_IRQn 1 */
/* USER CODE END TIM6_DAC_IRQn 1 */
}
方法2:
新建 tim6.c
/*使time6每毫秒加1*/
#include "tim6.h"
#include "main.h"
unsigned int time6 = 0;
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)//中断服务函数
{
if(htim->Instance == TIM6)
{
time6++;
}
}
-
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) -
库函数位置:stm32g4xx_hal_tim.h / Group9 / 第一个
新建 tim6.h
#ifndef _TIM6_H_
#define _TIM6_H_
extern unsigned int time6;//声明为全局变量
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim);
#endif
最后,打印到屏幕
main.c while(1)中
sprintf(text,"time6 = %d",time);
LCD_DisplayStringLine(Line2,(unsigned char *)text);
编译下载,观察屏幕
4.按键开关
初始配置
-
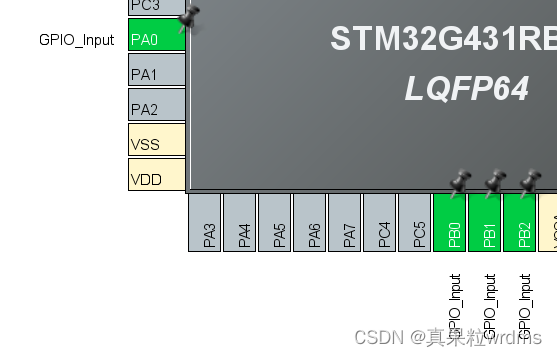
确定管脚
-
使能管脚
-
点击右上角Generate Code生成代码
程序代码
在上面设定好的定时中断的基础上编写
key.c
/*普通按键--------------------------------------------------------------*/
int key_flag[4][2] = {0};
void key_read(void)//读取按键状态
{
int i;
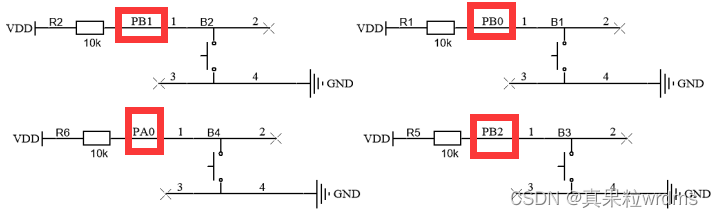
key_flag[0][0] = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
key_flag[1][0] = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key_flag[2][0] = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key_flag[3][0] = HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
//读取按键状态 0-按下 1-抬起
for(i = 0; i<4; i++)
{
if(key_flag[i][0] == 0)
key_flag[i][1]++;//当按键按下数组第二列按键对应行的值增加,在后面按键消抖时会用到
else
key_flag[i][1] = 0;//当按键抬起数组第二列按键对应行的值置0
}
}
int key_down_flag[4] = {0};
int key_down(int i)
{
if(key_flag[i][1] >5 && key_down_flag[i]==0)//按键刚按下
{
key_down_flag[i]==1;
return 1;
}
if(key_flag[i][1] ==0 && key_down_flag[i]==1)//按键刚抬起
key_down_flag[i]==0;
return 0;
}
-
HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0); -
库函数位置:/stm32g4xx_hal_gpio.h / Group2 / 第1个
key.h
#ifndef _KEY_H_
#define _KEY_H_
void key_read(void);
int key_down(int i);
#endif
模块代码使用
main.c
int number = 0;
while(1)
{
if(key_down(0))//按键按下一次加1
{
number++;
}
sprintf(text,"number = %d",number);
LCD_DisplayStringLine(Line2,(unsigned char *)text);
}
编译下载,按B1按键,观察屏幕
按键功能拓展
长按短按
/*长短按按键--------------------------------------------------------------*/
int key_flag[4][3] = {0};
void key_read(void)//读取按键状态
{
int i;
key_flag[0][0] = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
key_flag[1][0] = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key_flag[2][0] = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key_flag[3][0] = HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
//读取按键状态 0-按下 1-抬起
for(i = 0; i<4; i++)
{
if(key_flag[i][0] == 0)
key_flag[i][1]++;//当按键按下数组第二列按键对应行的值增加,在后面按键消抖时会用到
else
key_flag[i][1] = 0;//当按键抬起数组第二列按键对应行的值置0
}
}
int key_down_flag[4] = {0};
int key_down(int i)
{
if(key_flag[i][1] >5 && key_down_flag[i]==0)//按键刚按下
{
key_down_flag[i]=1;
}
if(key_flag[i][1] >2000 && key_down_flag[i]==1)//长按2s后
{
key_down_flag[i]=2;
return 2;
}
if(key_flag[i][1] ==0 && key_down_flag[i] == 1)//短按后抬起
{
key_down_flag[i]=0;
return 1;
}
if(key_flag[i][1] ==0 && key_down_flag[i] == 2)//长按后抬起
{
key_down_flag[i]=0;
}
return 0;
}
单击双击
/*单双击按键--------------------------------------------------------------*/
int key_down_flag[4] = {0};//按键按下标志
int key_down_time[4] = {0};//按下时的时间
int key_down(int i)
{
if(Key_flag[i][1] > 5 && key_down_flag[i]==0)//按下
key_down_flag[i]=1;
if(Key_flag[i][1] == 0 && key_down_flag[i]==1)//抬起
{
key_down_flag[i]=2;
key_down_time[i]=uwTick;
}
if(Key_flag[i][1] > 5 && key_down_flag[i]==2)//2次按下
{
key_down_flag[i]=3;
return 2;
}
if(Key_flag[i][1] == 0 && key_down_flag[i]==3)//2次抬起
key_down_flag[i]=0;
if(key_down_flag[i]==2 && (key_down_time[i]+200) < uwTick)//时间内没有再次按下
{
key_down_flag[i]=0;
return 1;
}
return 0;
}
长按短按+单击双击
/*单双击+长按按键--------------------------------------------------------------*/
int Key_flag[4][3] = {0};
void key_read(void)
{
int i;
Key_flag[0][0] = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
Key_flag[1][0] = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
Key_flag[2][0] = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
Key_flag[3][0] = HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
for(i = 0; i<4; i++)
{
if(Key_flag[i][0] == 0)
Key_flag[i][1]++;
else
Key_flag[i][1] = 0;
}
}
int key_down_flag[4] = {0};
int key_down_time[4] = {0};
int key_down(int i)
{
if(Key_flag[i][1] > 5 && key_down_flag[i]==0)//第一次按下
{
key_down_flag[i]=1;
}
if(Key_flag[i][1] == 0 && key_down_flag[i]==1)//第一次抬起
{
key_down_flag[i]=2;
key_down_time[i]=uwTick;
}
if(Key_flag[i][1] > 5 && key_down_flag[i]==2)//第二次按下
{
key_down_flag[i]=3;
return 2;
}
if(Key_flag[i][1] == 0 && key_down_flag[i]==3)//第二次抬起
{
key_down_flag[i]=0;
return 0;
}
if(key_down_flag[i]==2 && (key_down_time[i]+200) < uwTick)//时间内没有再次按下,判断为短按
{
key_down_flag[i]=0;
return 1;
}
/*长按*/
if(Key_flag[i][1]>2000 && key_down_flag[i]==1)
{
key_down_flag[i]=5;
return 3;
}
if(Key_flag[i][1] == 0 && key_down_flag[i]==5)//长按后抬起
{
key_down_flag[i]=0;
}
return 0;
}
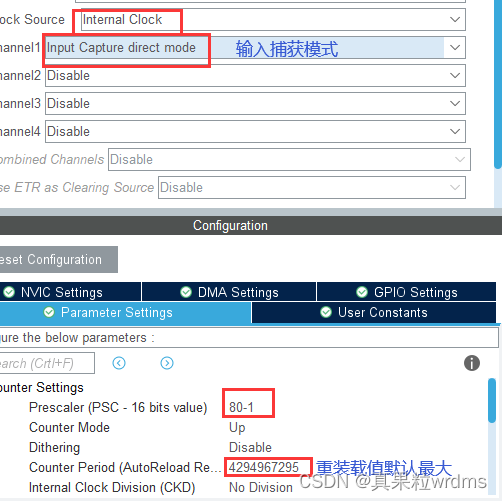
5.输入捕获
输入捕获是一种用于测量信号的周期和频率的功能,常用于微控制器中。
输入捕获是微控制器定时器的一个功能,它允许定时器捕捉外部事件发生的时间点。这个功能通常用于测量脉冲宽度、信号周期和频率等参数。
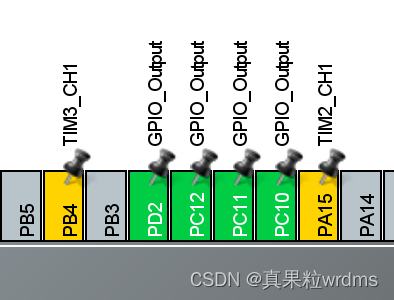
初始配置
-
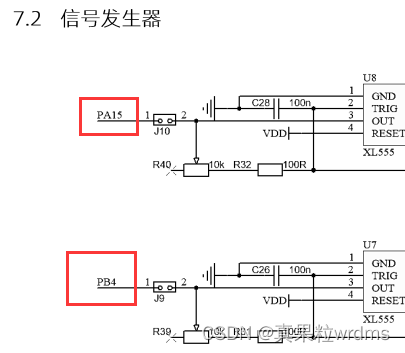
确定管脚
-
CubeMX配置
-
时钟使能,通道开启(TIM3_CH1和TIM2_CH1),预分频值设置
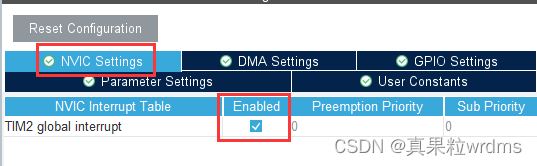
-
中断使能(两个)
程序代码
main.c
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1);//开启捕获中断
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_1);
- 库函数位置:stm32g4xx_hal_tim.h / Group4 / Interrupt
新建 ic_it.c
#include "ic_it.h"
uint32_t tim3_cnt1 = 0;
float frequency1 = 0;
uint32_t tim2_cnt1 = 0;
float frequency2 = 0;
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
/************法一,用寄存器获取值**************/
if(htim->Instance == TIM3)//判断中断来自TIM3
{
tim3_cnt1 = TIM3->CNT;//获取计数值
TIM3->CNT = 0;//清零计数值
frequency1 = (80000000/80)/tim3_cnt1;//频率=(晶振频率/预分频值)/计数值
}
/************法二,用库函数获取值**************/
if(htim->Instance == TIM2)//判断中断来自TIM2
{
tim2_cnt1 = __HAL_TIM_GetCounter(htim);//获取计数值
__HAL_TIM_SetCounter(htim,0);//清零计数值
frequency2 = (80000000/80) / tim2_cnt1;//频率=(晶振频率/预分频值)/计数值
}
}
这里写了两种获取计数值的方法,觉得那个方便用哪个就行。
-
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) -
库函数位置:stm32g4xx_hal_tim.h / Group9 / Interrupt
新建 ic_it.h
#ifndef _IC_IT_H_
#define _IC_IT_H_
extern float frequency1;
extern float frequency2;
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim);
#endif
模块代码使用
main.c
while(1)
{
sprintf(text,"F1:%.2f",frequency1);
LCD_DisplayStringLine(Line2,(unsigned char *)text);
sprintf(text,"F2:%.2f",frequency2);
LCD_DisplayStringLine(Line2,(unsigned char *)text);
}
编译下载,转动信号发生器旋钮,观察屏幕。
6.PWM输出
PWM输出是一种利用数字信号来模拟模拟信号的技术,通过控制方波的占空比来达到调节输出功率的目的。
初始配置
-
选择通用定时器:通用定时器有6个,分为两组,第一组是TIM2,TIM3,TIM4,第二组是TIM15,TIM16,TIM17。第一组的通用定时器功能齐全,可以用于多种场合,如PWM输出、输入捕获等。而第二组的通用定时器通道数量较少,可能只有1个或2个通道,适用于需求不那么复杂的场景。
-
这里以TIM3为例
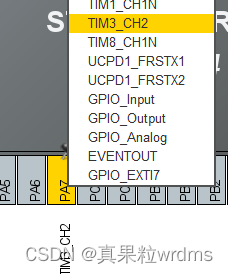
1.找到TIM3的管脚
在:/嵌入式资源数据包_STM32G4_2023/竞赛平台/CT117E_M4_SCH.pdf 中
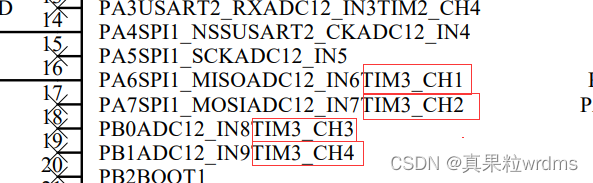
有PA6,PA7,PB0,PB1四个管脚分别对应TIM3的四个通道,随便选择其中一个
2.打开CubeMX,配置管脚
3.使能时钟,开启
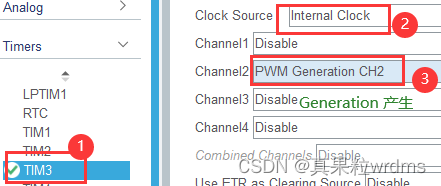
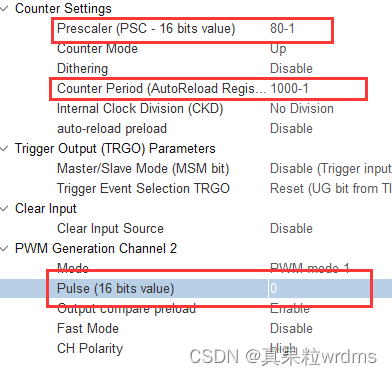
5.设置PWM波参数
-
预分频值 Prescaler 80-1
-
重装载值 Counter Period 1000-1
-
占空比值 Pulse 占空比值/重装载值 = 占空比
PWM波频率计算
-
晶振频率为80Mhz = 80 000 000hz
-
分频后频率 = 晶振频率 预分频值 + 1 = 80 , 000 , 000 80 = 1 , 000 , 000 Hz 分频后频率 = \frac{晶振频率}{预分频值 + 1} = \frac{80,000,000}{80} = 1,000,000 \text{ Hz} 分频后频率=预分频值+1晶振频率=8080,000,000=1,000,000 Hz
-
工作频率 = 分频后频率 1000 = 1 , 000 , 000 1000 = 1 , 000 H z 工作频率 = \frac{分频后频率}{1000} = \frac{1,000,000}{1000} = 1,000 { Hz} 工作频率=1000分频后频率=10001,000,000=1,000Hz
-
工作频率为1000Hz,即每秒执行中断1000次
程序代码
mian.c
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2);//开启PWM通道
库函数位置:stm32g4xx_hal_tim.h / Group3 / Polling 投票
新建 pwm_Generation.c
#include "PWM_Generation.c"
#define crystal 80000000/80 //预分频后的频率
//PA7-TIM3-CH2
/*
@pwm_PA7T3_Frequency:修改PWM波的频率
*/
void pwm_PA7T3_Frequency(float num)
{
TIM3->ARR=(crystal/num)-1;
}
/*
@pwm_PA7T3C2_pulse:修改PWM波的占空比
@para num 0.0~1.0
*/
void pwm_PA7T3C2_Pulse(float num)
{
TIM3->CCR2 = num * (TIM3->ARR+1);
}
注意:TIM2的pwm通道改变频率时,波形有时变成一条直线,可以将TIM2的CNT清零即可解决,(不知道为什么,可能是计数值溢出Bug了)
新建 pwm_Generation.h
#ifndef _PWM_GENERATION_H_
#define _PWM_GENERATION_H_
void pwm_PA7T3_Frequency(fl num);
void pwm_PA7T3C2_Pulse(float num);
#endif
模块代码使用
main.c
int number = 0;
float PA7_pwm = 0;
while(1)
{
if(key_down(0))
PA7_pwm+= 0.1;
if(PA7_pwm > = 1)
PA7_pwm = 0.0;
pwm_PA7T3C2_Pulse(PA7_pwm);
}
找一个LED小灯,将小灯两极用杜邦线连接,一头接3V,一头接PA7
编译下载,按B1按键,观察小灯;
每按一下按键B1,灯就会暗一点,按十次之后灯又会重新变亮
7.ADC数模信号转换
ADC,即模数转换器(Analog-to-Digital Converter),是将模拟信号转换为数字信号的设备
初始配置
-
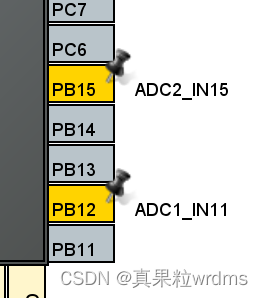
确定管脚
-
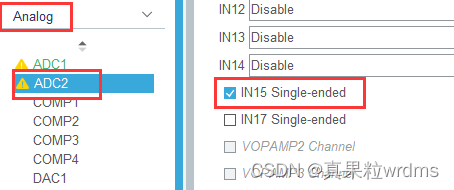
CubeMX配置
-
使能端口
ADC2_IN15
ADC_IN11

程序代码
新建my_adc.c
float getADC(ADC_HandleTypeDef *hadc)
{
HAL_ADC_Start(hadc);//开启ADC
return (HAL_ADC_GetValue(hadc)*3.3f/4035);//3.3为额定电压,4096为2的12次幂,校准到了4035
}
-
HAL_ADC_Start(hadc);库函数位置:/stm32g4xx_hal_adc.h / Group2 / Polling
-
HAL_ADC_GetValue(hadc);库函数位置:/stm32g4xx_hal_adc.h / Group2
模块代码使用
main.c
while(1)
{
sprintf(text,"F1:%.2f",getADC(&hadc1));
LCD_DisplayStringLine(Line2,(unsigned char *)text);
sprintf(text,"F2:%.2f",getADC(&hadc2));
LCD_DisplayStringLine(Line2,(unsigned char *)text);
}
编译下载,转动模拟电压旋钮,观察屏幕
8.E2PROM存储器
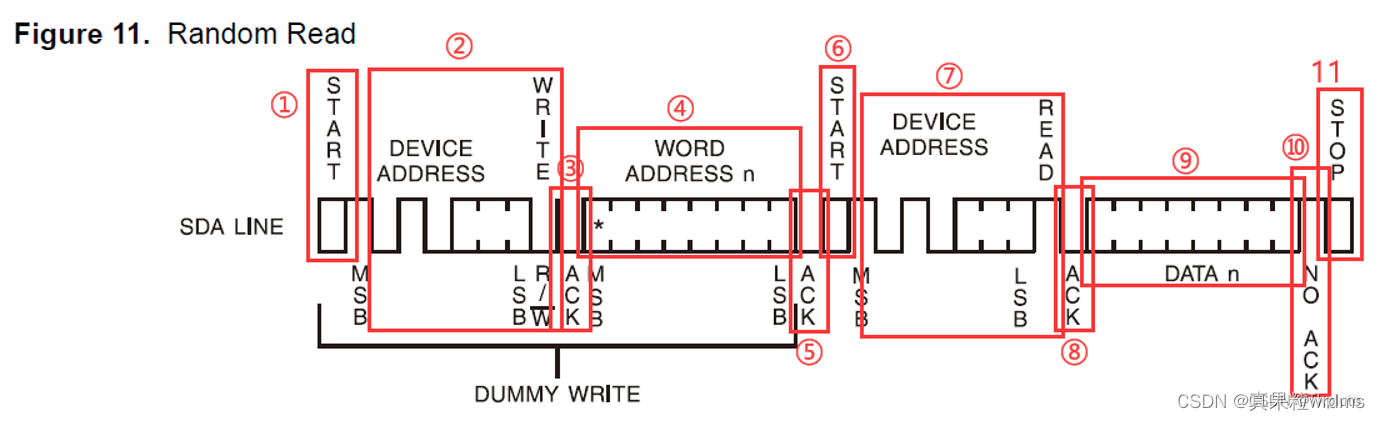
AT24C02芯片(又叫E2PROM存储器、EEPROM存储器),是一种通过I2C(IIC)协议通信的掉电保存存储器芯片,其内部含有256个8位字节。
I2C总线是一种双向二线制的同步串行总线,它只需要两根线即可在连接于总线上的器件之间传送信息(分别为SDA和SCL)。在I2C总线上,可以有若干个从机(如AT24C02芯片),但只能有一个主机(如单片机)
在比赛方提供的资源数据包——底层驱动代码参考中,有用HAL库函数实现的软件I2C的库,我们就基于这个库来使用AT24C02芯片(E2PROM存储器)进行读写操作。
初始配置
可以不用CubeMX配置管脚,直接在main函数中写 I2CInit(); 即可
-
加入两个库文件
位置:嵌入式资源数据包_STM32G4_2023\竞赛平台\3-底层驱动代码参考\I2C_HAL
程序代码
单个字符读写
-
main.c
I2CInit(); -
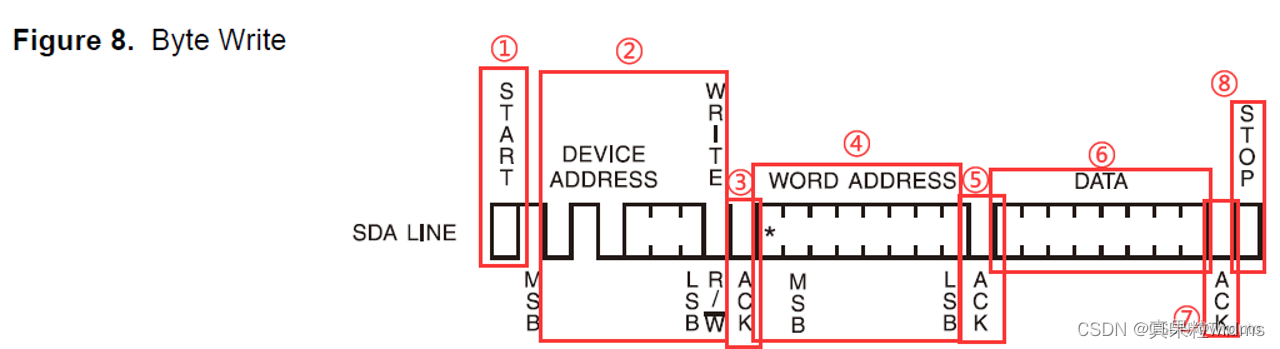
在:竞赛平台/4-芯片资料/AT24C02.pdf中找到下图
-
根据下图图编写发送程序
-
根据下图编写接收程序
新建 i2c.c
#include "i2c.h" #include "i2c_hal.h" //写函数 void i2_write(unsigned char address,unsigned char data) { I2CStart(); //1.start I2CSendByte(0xa0); //2.send 0xa0 I2CWaitAck(); //3.wack I2CSendByte(address); //4.send address I2CWaitAck(); //5.wack I2CSendByte(data); //6.send data I2CWaitAck(); //7.wack I2CStop(); //8.stop HAL_Delay(20);//写入函数,最后一定要加延时,不然有可能存不进去 } //读函数 unsigned char i2_read(unsigned char address) { unsigned char data; I2CStart(); //1.start I2CSendByte(0xa0); //2.send 0xa0 I2CWaitAck(); //3.wack I2CSendByte(address);//4.send address I2CWaitAck(); //5.wack I2CStart(); //6.start I2CSendByte(0xa1); //7.send 0xa1 I2CWaitAck(); //8.wack data = I2CReceiveByte();//9.receive data I2CSendNotAck(); //10.not ack I2CStop(); //11.stop return data; }- 库函数位置:i2c_hal.h
新建 i2c.h
#ifndef _I2C_H_ #define _I2C_H_ void i2_write(unsigned char address,unsigned char data); unsigned char i2_read(unsigned char address); #endif
8位数据读写
main.c
int key_return_1 = 0;
unsigned char data = 0;
data = i2_read(1);//读取
while(1)
{
if(key_down(0))//按键按下返回1
{
data = 2;
i2_write(1,data);//写入
HAL_Delay(10);
}
sprintf(text,"data = %d",data);
LCD_DisplayStringLine(Line2,(unsigned char *)text);
}
编译下载,观察屏幕;重新上电后屏幕还显示2;
16位数据读写
因为 eeprom 储存器 最多存储8位数据 最大值为255,所以若要存储更大的值需要合并两次或多次接收的数据
i2c.c 新加两个函数
void i2_write_long(int send_data)//可发送最大值为65535
{
unsigned int high = send_data >> 8;//数据左移,留下高八位
unsigned int low = send_data & 0xff;//和0x00相与,留下低八位
i2_write(1,high);//高八位发送到地址1
HAL_Delay(5);//延时等待发送完成
i2_write(2,low);//低八位发送到地址2
}
unsigned int i2_read_long(void)
{
unsigned int read_data;
read_data = (i2_read(1)<<8)+i2_read(2);//将接收到的高八位与第八位相加
return read_data;
}
使用:
main.c
int key_return_1 = 0;
int data = 0;
data = i2_read_long();//读取
while(1)
{
if(key_down(0))
{
i2_write_long(65535);//写入
HAL_Delay(10);
}
sprintf(text,"data = %d",data);
LCD_DisplayStringLine(Line2,(unsigned char *)text);
}
编译下载,观察屏幕;
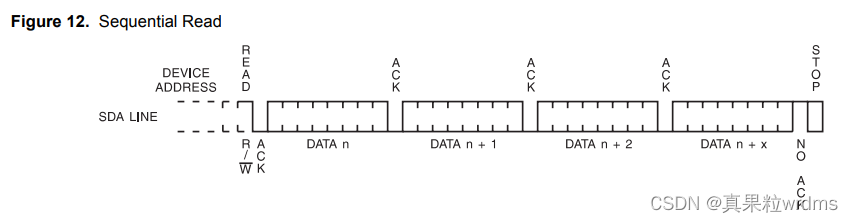
字符串读写
/*读函数*/
//pucBuf:字符串首地址
//ucAddr:读取地址
//ucNum:字符串长度
void MEM_Read(unsigned char* pucBuf, unsigned char ucAddr,unsigned char ucNum)
{
I2CStart(); //1.start
I2CSendByte(0xa0); //2.send 0xa0
I2CWaitAck(); //3.wack
I2CSendByte(ucAddr); //4.send address
I2CWaitAck(); //5.wack
I2CStart(); //6.start
I2CSendByte(0xa1); //7.send 0xa1
I2CWaitAck(); //8.wack
while(ucNum--)
{
*pucBuf++ = I2CReceiveByte();//9.receive data
if(ucNum)
I2CSendAck(); //10.sack
else
I2CSendNotAck(); //11.not ack
}
I2CStop(); //12.stop
}
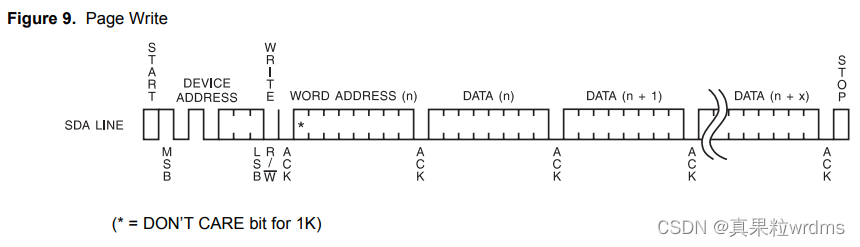
/*写函数*/
//pucBuf:字符串首地址
//ucAddr:储存地址
//ucNum:字符串长度
void MEM_Write(unsigned char* pucBuf, unsigned char ucAddr,unsigned char ucNum)
{
I2CStart(); //1.start
I2CSendByte(0xa0); //2.0xa0
I2CWaitAck(); //3.wack
I2CSendByte(ucAddr); //4.send address
I2CWaitAck(); //5.wack
while(ucNum--)
{
I2CSendByte(*pucBuf++); //6.send data
I2CWaitAck(); //7.wack
}
I2CStop(); //8.stop
HAL_Delay(500);
}
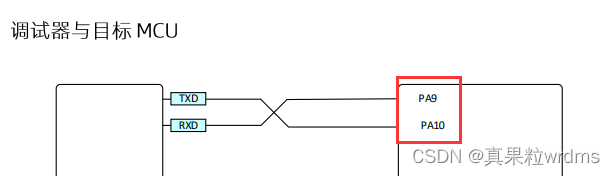
9.USART串口通信
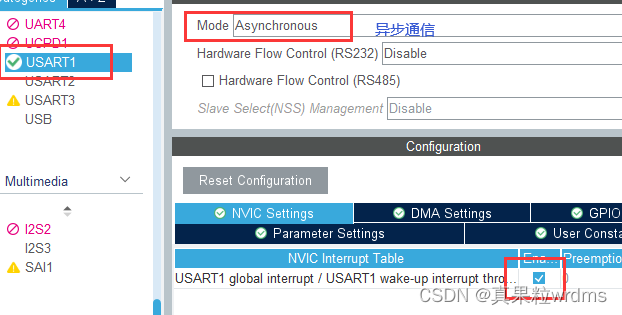
USART(Universal Synchronous Asynchronous Receiver Transmitter,通用同步异步收发器)是一种串口通信技术,它支持同步和异步两种通信模式
初始配置
-
找到usart1的两个管脚
-
CubeMX配置管脚
-
使能USART1中断
-
波特率 数据位 停止位


程序代码
main.c
HAL_UART_Receive_IT(&huart1, (uint8_t *)&RX_buffer_IT, 1);//串口中断开启
新建 my_usart.c
#include "my_usart.h"
char send_data[] = "HELLOW,WORLD!"
char RX_buffer[RX_N] = {0};//接收缓存区
char RX_buffer_IT;//中断接收缓存区
unsigned int Rx_CNT = 0;//接收计数
/***********中断回调函数**************/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1)//判断触发中断的是USART1
{
if(Rx_CNT < RX_N)//如果没有溢出
{
RX_buffer[Rx_CNT++] = RX_buffer_IT;//接收转存
HAL_UART_Transmit(&huart1, (uint8_t *)send_data, strlen(send_data), HAL_MAX_DELAY);//向电脑发送数据;
if(RX_buffer[Rx_CNT-1] == ' ')//空格为结束标志
Rx_CNT = 0;//下标置零
}
else//数据溢出
Rx_CNT = 0;//下标置零
HAL_UART_Receive_IT(&huart1, (uint8_t *)&RX_buffer_IT, 1);
//再次开启接收中断
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)- 库函数位置:stm32g4xx_hal_usart.h / Group2 /倒数第五个
HAL_UART_Transmit(&huart1, (uint8_t *)send_data, sizeof(send_data), HAL_MAX_DELAY);- 库函数位置:stm32g4xx_hal_usart.h / Group2 /第一个
新建 my_usart.h
#ifndef _MY_USART_H_
#define _MY_USART_H_
#include "main.h"
#define RX_N 50 //数据溢出值
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
extern char RX_buffer[RX_N];//接收缓存区
extern char RX_buffer_IT;//中断接收缓存区
#endif
模块代码使用
main.c
while(1)
{
sprintf(text,"receive:%s",RX_buffer);
LCD_DisplayStringLine(Line2,(unsigned char *)text);
}
HAL_UART_Receive_IT(&huart1, (uint8_t *)&RX_buffer_IT, 1);- 库函数位置:stm32g4xx_hal_usart.h / Group2 /第四个
编译下载,打开串口助手,波特率设置为9600,连接串口;
发送数据,以空格结尾;观察屏幕 和 串口助手。
10.uwTick计时
STM32CUBEMX生成的工程,会自动把Systick配置成1ms中断的定时器,并在中断函数里,在中断处理函数中将变量uwTick每1ms增加1。这样我们就可以知道芯片的走时情况,直到芯片到目前为止上电多长时间。
led.c
/***利用uwTick实现小灯定时熄灭***/
int led_times[8] = {0};
void led_time(int leds,int t)//小灯亮t毫秒
{
led_times[leds] = uwTick + t;
led_turn_on(leds);
}
void led_time_chack(int leds)//检查时间是否到了
{
if(led_times[leds] < uwTick && (LED&(1<<leds) != 0))//时间到了且小灯没灭
led_turn_off(leds);
}
main.c
while(1)
{
if(Key_flag[0][1] > 5)//检测按键0,是否按下
led_time(0,1000);//第0个小灯,亮1000毫秒
led_time_chack(0);
}
编译下载,观察小灯;
11.库函数总结
IT - 中断 (interrupt)
IC - 输入捕获 (input capture)
Callback - 回调
管脚
-
HAL_GPIO_WritePin(); //小灯- /stm32g4xx_hal_gpio.h / Group2 / 第2个
-
HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);- /stm32g4xx_hal_gpio.h / Group2 / 第1个
屏幕
-
LCD_Init();//lcd初始化- lcd.h
时钟
-
HAL_TIM_Base_Start_IT(&htim6);//开启时钟和中断- stm32g4xx_hal_tim.h / Group1 / Interrupt
-
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)//中断回调函数- stm32g4xx_hal_tim.h / Group9 / 第一个
-
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2);//开启PWM通道- stm32g4xx_hal_tim.h / Group3 / Polling 投票
捕获
-
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1);//开启捕获中断- stm32g4xx_hal_tim.h / Group4 / Interrupt
串口
-
HAL_UART_Receive_IT(&huart1, (uint8_t *)&RX_buffer_IT, 1);//开启接收中断- stm32g4xx_hal_usart.h / Group2 /第四个
-
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);//接收中断回调函数- stm32g4xx_hal_usart.h / Group2 /倒数第五个
-
HAL_GPIO_WritePin(); //小灯- /stm32g4xx_hal_gpio.h / Group2 / 第2个
-
HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);- /stm32g4xx_hal_gpio.h / Group2 / 第1个
屏幕
-
LCD_Init();//lcd初始化- lcd.h
时钟
-
HAL_TIM_Base_Start_IT(&htim6);//开启时钟和中断- stm32g4xx_hal_tim.h / Group1 / Interrupt
-
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)//中断回调函数- stm32g4xx_hal_tim.h / Group9 / 第一个
-
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2);//开启PWM通道- stm32g4xx_hal_tim.h / Group3 / Polling 投票
捕获
-
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1);//开启捕获中断- stm32g4xx_hal_tim.h / Group4 / Interrupt
串口
-
HAL_UART_Receive_IT(&huart1, (uint8_t *)&RX_buffer_IT, 1);//开启接收中断- stm32g4xx_hal_usart.h / Group2 /第四个
-
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);//接收中断回调函数- stm32g4xx_hal_usart.h / Group2 /倒数第五个
12.LCD屏幕反转(拓展)
在lcd.c中可以查看相关函数
上下翻转

左右翻转
