前言
单应矩阵主要用于平面场景的位姿估计,例如面对墙或者是地面时。无人机携带的俯视相机,扫地机器人携带的顶视相机这两种情况常见。
1.函数声明
cv::Mat Initializer::ComputeH21(const vector<cv::Point2f> &vP1,const vector<cv::Point2f> &vP2) 2.函数定义
1.单应矩阵的推导:
三维空间上的平面的的点法式方程:

对方程进行变形:
经过一系列变换:
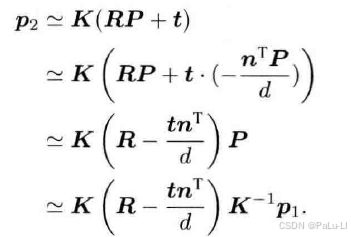
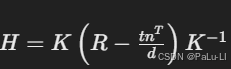
得到单应矩阵:
2.单应矩阵的求解(ComputeH21):
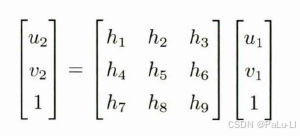
1.将变换转换成矩阵关系
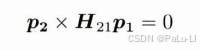
2.左右同时×乘p2
矩阵形式:

方程形式:

再次转换为矩阵形式:
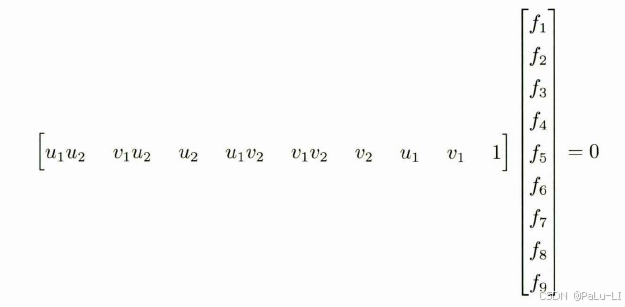
只需要4对点即8个约束方程就能求解上述的矩阵方程。
把H矩阵看成了向量,通过解该向量的线性方程来恢复H,又称直接线性变换法(Direct Linear Transform, DLT)。
对矩阵进行SVD分解,右奇异矩阵的最后一列就是最优解。
3.代码分析
/*
用DLT方法求解单应矩阵H
这里最少用4对点就能够求出来,不过这里为了统一还是使用了8对点求最小二乘解
vP1 参考帧中归一化后的特征点
vP2 当前帧中归一化后的特征点
return cv::Mat 计算的单应矩阵H
*/
cv::Mat Initializer::ComputeH21(
const vector<cv::Point2f> &vP1, //归一化后的点, in reference frame
const vector<cv::Point2f> &vP2) //归一化后的点, in current frame
{
//获取参与计算的特征点的数目
const int N = vP1.size();
// 构造用于计算的矩阵 A
cv::Mat A(2*N, //行,注意每一个点的数据对应两行
9, //列
CV_32F); //float数据类型
// 构造矩阵A,将每个特征点添加到矩阵A中的元素
for(int i=0; i<N; i++)
{
//获取特征点对的像素坐标
const float u1 = vP1[i].x;
const float v1 = vP1[i].y;
const float u2 = vP2[i].x;
const float v2 = vP2[i].y;
//生成这个点的第一行
A.at<float>(2*i,0) = 0.0;
A.at<float>(2*i,1) = 0.0;
A.at<float>(2*i,2) = 0.0;
A.at<float>(2*i,3) = -u1;
A.at<float>(2*i,4) = -v1;
A.at<float>(2*i,5) = -1;
A.at<float>(2*i,6) = v2*u1;
A.at<float>(2*i,7) = v2*v1;
A.at<float>(2*i,8) = v2;
//生成这个点的第二行
A.at<float>(2*i+1,0) = u1;
A.at<float>(2*i+1,1) = v1;
A.at<float>(2*i+1,2) = 1;
A.at<float>(2*i+1,3) = 0.0;
A.at<float>(2*i+1,4) = 0.0;
A.at<float>(2*i+1,5) = 0.0;
A.at<float>(2*i+1,6) = -u2*u1;
A.at<float>(2*i+1,7) = -u2*v1;
A.at<float>(2*i+1,8) = -u2;
}
// 定义输出变量,u是左边的正交矩阵U, w为奇异矩阵,vt中的t表示是右正交矩阵V的转置
cv::Mat u,w,vt;
//使用opencv提供的进行奇异值分解的函数
cv::SVDecomp(A, //输入,待进行奇异值分解的矩阵
w, //输出,奇异值矩阵
u, //输出,矩阵U
vt, //输出,矩阵V^T
cv::SVD::MODIFY_A | //输入,MODIFY_A是指允许计算函数可以修改待分解的矩阵,官方文档上说这样可以加快计算速度、节省内存
cv::SVD::FULL_UV); //FULL_UV=把U和VT补充成单位正交方阵
// 返回最小奇异值所对应的右奇异向量
// 注意前面说的是右奇异值矩阵的最后一列,但是在这里因为是vt,转置后了,所以是行;由于A有9列数据,故最后一列的下标为8
return vt.row(8).reshape(0, //转换后的通道数,这里设置为0表示是与前面相同
3); //转换后的行数,对应V的最后一列
}结束语
以上就是我学习到的内容,如果对您有帮助请多多支持我,如果哪里有问题欢迎大家在评论区积极讨论,我看到会及时回复。