在这篇文章中,我将介绍有关图像锐化有关的知识,具体包括锐化的简单介绍、一阶锐化与二阶锐化等方面内容。
一、锐化
1.1 概念
锐化(sharpening)就是指将图象中灰度差增大的方法,一次来增强物体的轮廓与边缘。因为发生锐化的地方都是发生灰度差突变的地方,所以锐化算法都是基于微分作用。
1.2 作用
一般来说,锐化增强灰度差,除了使物体与轮廓的细节增强后,它还是重要的预处理的一步,为了方便之后的物体检测与识别等。
二、一阶微分锐化方法
一阶微分锐化的计算公式十分简单,具体如下:
2.1 单方向一阶锐化
单方向的一阶锐化即是对某特定方向的边缘信息进行增强。通常,我们通过模板来实现,比如:
代码与处理后图像分别为:(代码中为了增强最后锐化后的效果,采用了垂直方向的锐化,而非上述模板中水平方向的锐化)
import cv2
import numpy as np
import matplotlib.pyplot as plt
image = cv2.imread(r'C:\Users\20349\Desktop\picture\tree.png')
# 定义单方向一阶微分锐化模板
kernel = np.array([[1, 0, -1],
[2, 0, -2],
[1, 0, -1]])
# 应用卷积核到图像上
sharpened_image = cv2.filter2D(image, -1, kernel)
image_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
sharpened_image_rgb = cv2.cvtColor(sharpened_image, cv2.COLOR_BGR2RGB)
fig, axes = plt.subplots(1, 2)
# 显示原图和处理后的图像
axes[0].imshow(image_rgb)
axes[0].set_title('Original Image')
axes[0].axis('off') # 不显示坐标轴
axes[1].imshow(sharpened_image_rgb)
axes[1].set_title('Sharpened Image')
axes[1].axis('off') # 不显示坐标轴
plt.show()
具体关于实现锐化部分的函数类似地可以写成代码如下:
def filter_2d(image, kernel):
# 获取图像和卷积核的尺寸
image_height, image_width, *image_channels = image.shape
kernel_height, kernel_width = kernel.shape
# 确保卷积核是奇数尺寸,以便有中心点
if kernel_height % 2 == 0 or kernel_width % 2 == 0:
raise ValueError("卷积核的宽高都应该是奇数")
# 计算填充大小
pad_size_height = kernel_height // 2
pad_size_width = kernel_width // 2
# 创建一个带有边框填充的图像副本,使用零填充
padded_image = cv2.copyMakeBorder(image, pad_size_height, pad_size_height, pad_size_width, pad_size_width,
cv2.BORDER_CONSTANT)
# 如果图像是彩色图像,则需要分别处理每个通道
if len(image_channels) > 0:
channels = cv2.split(padded_image)
output_channels = []
for channel in channels:
output_channel = np.zeros_like(channel)
# 对于每个像素位置应用卷积
for y in range(pad_size_height, image_height + pad_size_height):
for x in range(pad_size_width, image_width + pad_size_width):
region = channel[y - pad_size_height:y + pad_size_height + 1,
x - pad_size_width:x + pad_size_width + 1]
output_channel[y - pad_size_height, x - pad_size_width] = (region * kernel).sum()
output_channels.append(output_channel)
output_image = cv2.merge(output_channels)
else:
# 对于灰度图像直接处理
output_image = np.zeros_like(image)
for y in range(pad_size_height, image_height + pad_size_height):
for x in range(pad_size_width, image_width + pad_size_width):
region = padded_image[y - pad_size_height:y + pad_size_height + 1,
x - pad_size_width:x + pad_size_width + 1]
output_image[y - pad_size_height, x - pad_size_width] = (region * kernel).sum()
return output_image(该函数代码与实际调用的函数代码略有不同)
此外,在进行了上述步骤后进行取绝对值操作,可以增强对比度,避免负值影响问题等。
2.2 无方向一阶锐化
通过观察处理结果,我们发现单方向一阶微分锐化对于矩形特征的物体处理效果优秀,但对于不规则的物体处理效果有所欠缺,此时就需要无方向一阶微分锐化。
交叉微分锐化
首先是交叉微分锐化,其表达式为:
该方法可以用代码表示为如下,以及其处理结果也如下所示:
def roberts_cross(image):
image_height, image_width = image.shape
output_image = np.zeros_like(image)
# 定义Roberts算子
kernel_x = np.array([[1, 0], [0, -1]])
kernel_y = np.array([[0, -1], [1, 0]])
# 对每个像素应用Roberts算子
for y in range(0, image_height - 1):
for x in range(0, image_width - 1):
region = image[y:y + 2, x:x + 2]
gradient_x = (region * kernel_x).sum()
gradient_y = (region * kernel_y).sum()
output_image[y, x] = np.sqrt(gradient_x ** 2 + gradient_y ** 2)
# 归一化
output_image = cv2.normalize(output_image, None, 0, 255, cv2.NORM_MINMAX)
return output_image.astype(np.uint8)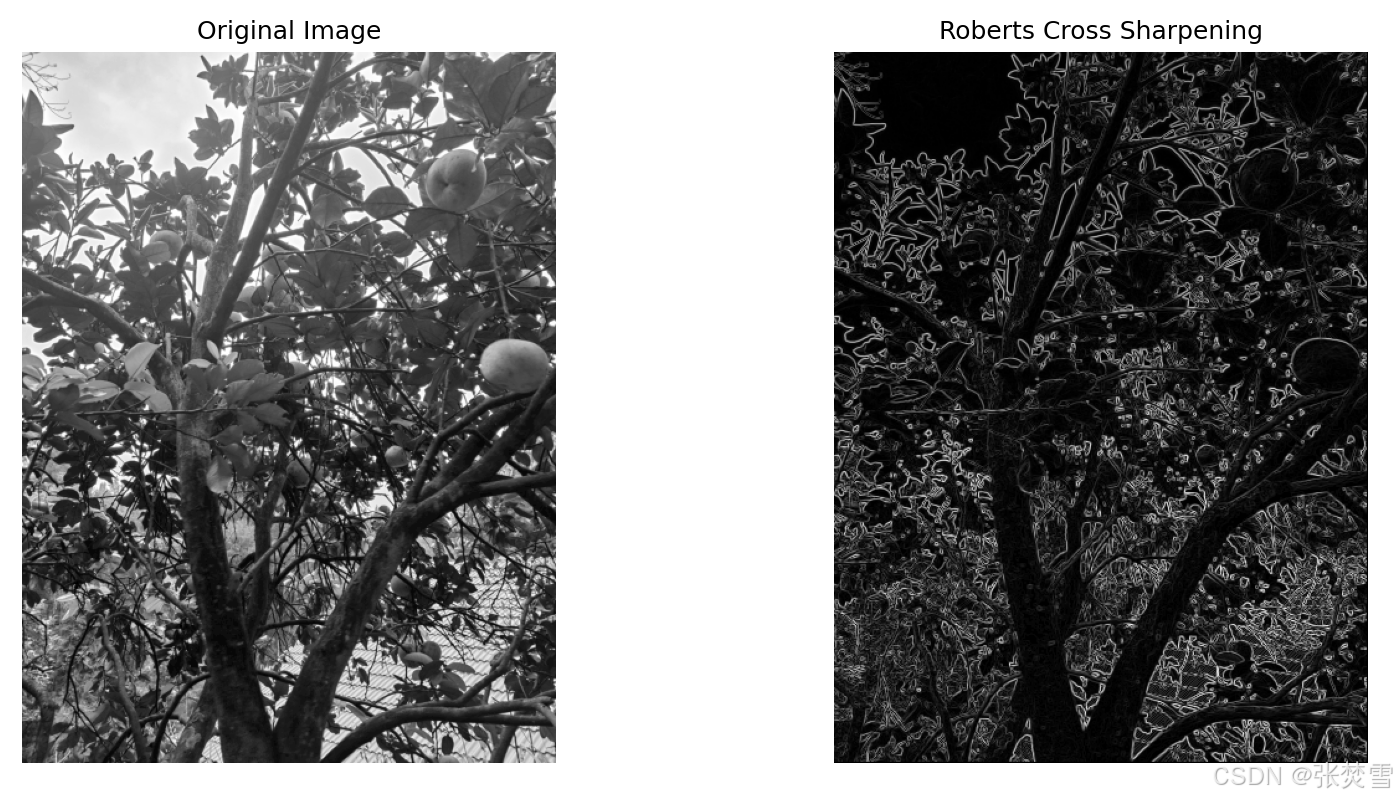
Sobel锐化
关于Sobel锐化可以用表达式表示为:
其中:
代码以及结果分别为:
def sobel_sharpen(image):
image_float = image.astype(float)
# 定义Sobel算子
kernel_x = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]])
kernel_y = np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]])
# 计算x方向和y方向的梯度
gradient_x = cv2.filter2D(image_float, -1, kernel_x)
gradient_y = cv2.filter2D(image_float, -1, kernel_y)
# 合并两个方向的梯度
gradient_magnitude = np.sqrt(gradient_x ** 2 + gradient_y ** 2)
sharpened_image = image_float + gradient_magnitude
sharpened_image = np.clip(sharpened_image, 0, 255)
return sharpened_image.astype(np.uint8)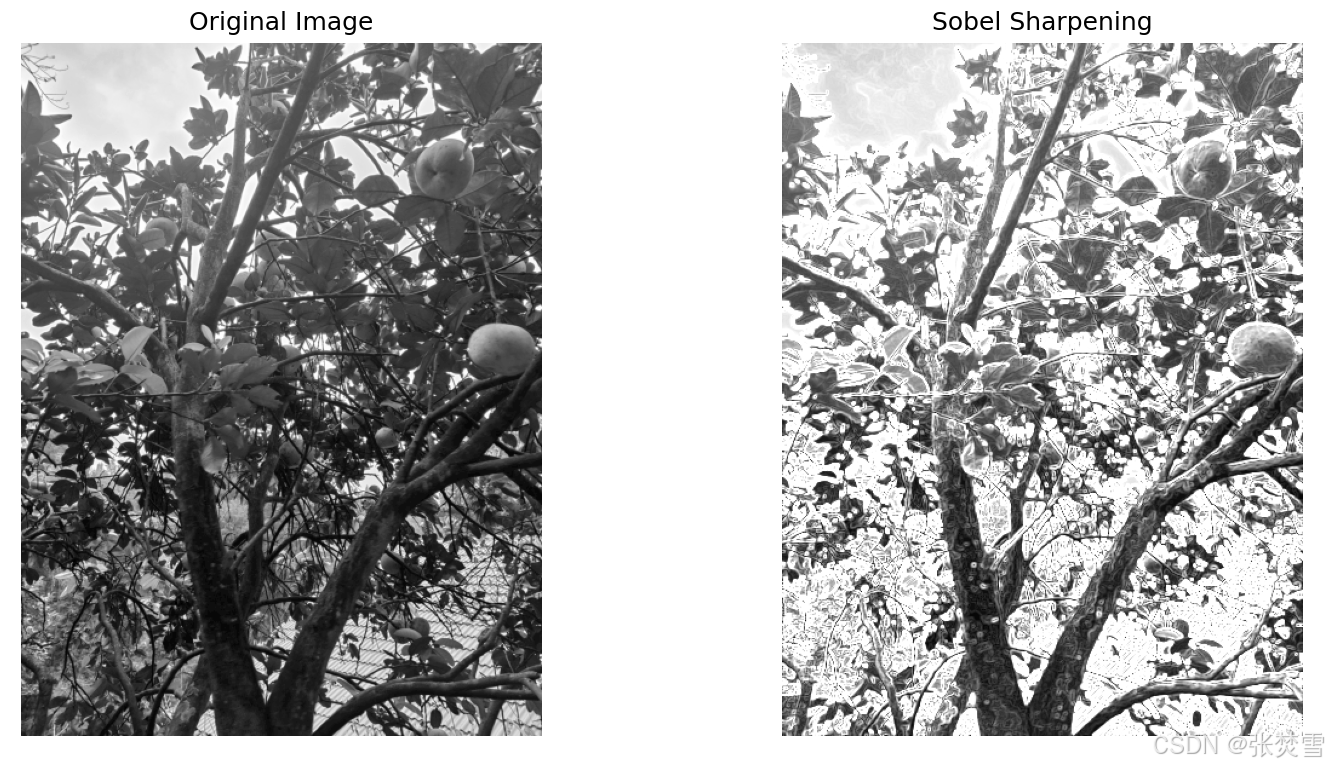
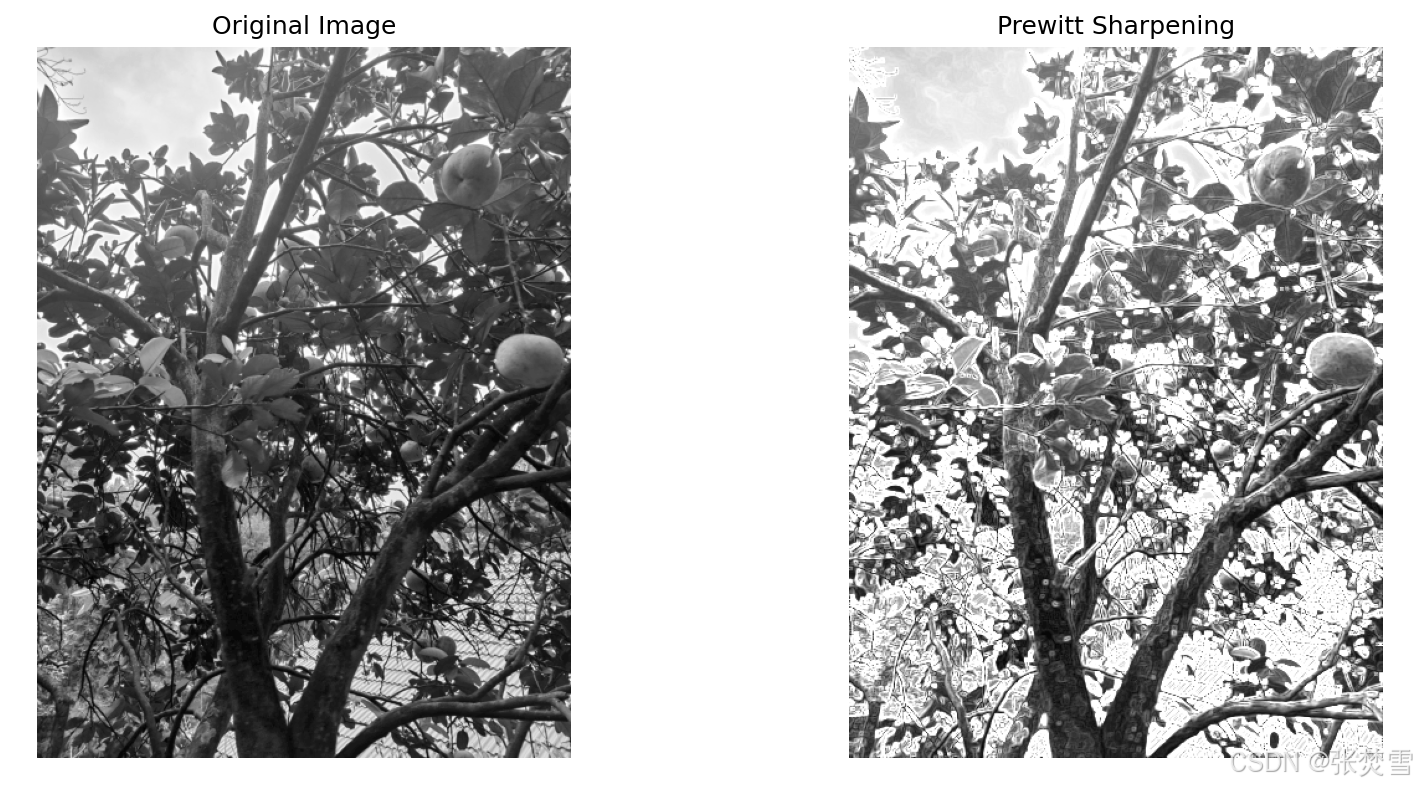
Prewitt锐化
如果将刚才的Sobel算法中核进行修改即可得到Prewitt算法,具体Prewitt算法的核为:
其处理结果为:
三、二阶微分锐化方法
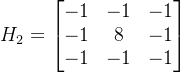
Laplacin算法
关于Laplacin算法的模板为:
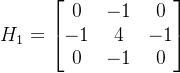
这个模板可以通过如下的表达式推导得出:
(具体推导过程省略)
那么我们将这个模板用于锐化后得到结果为:
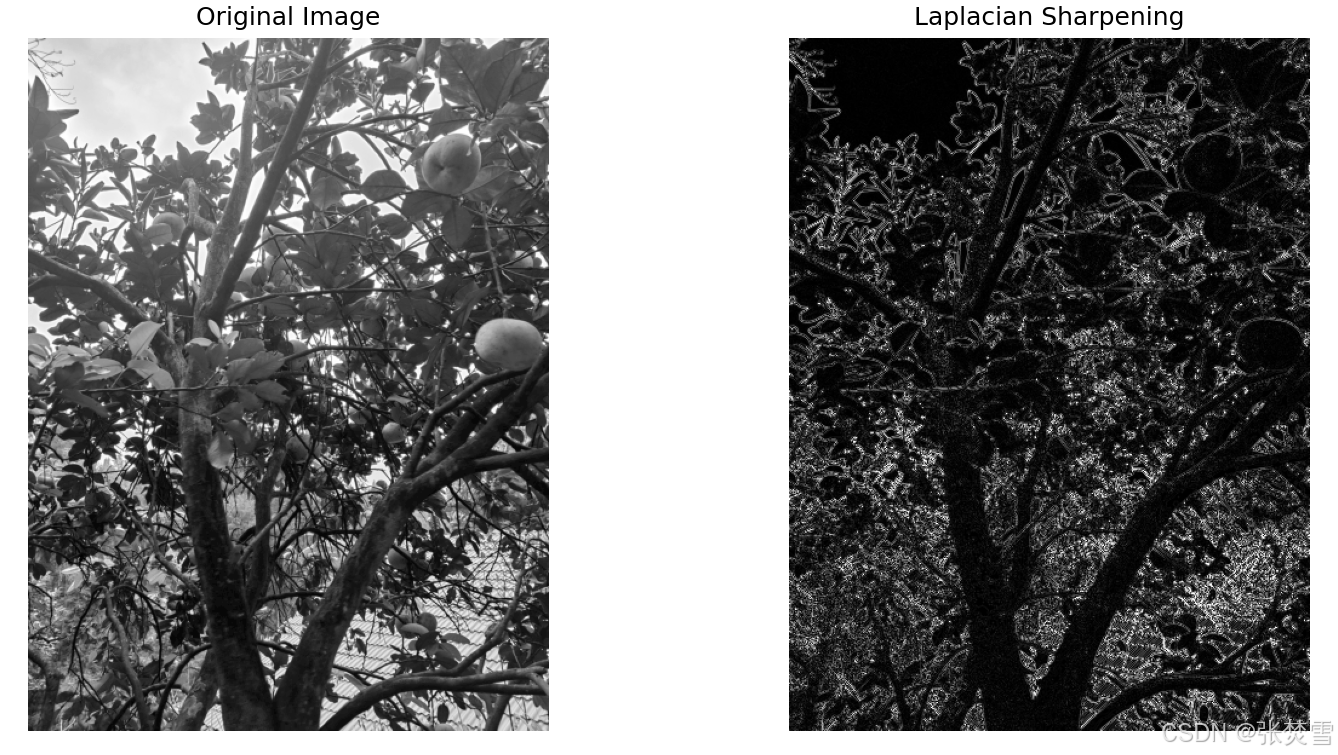
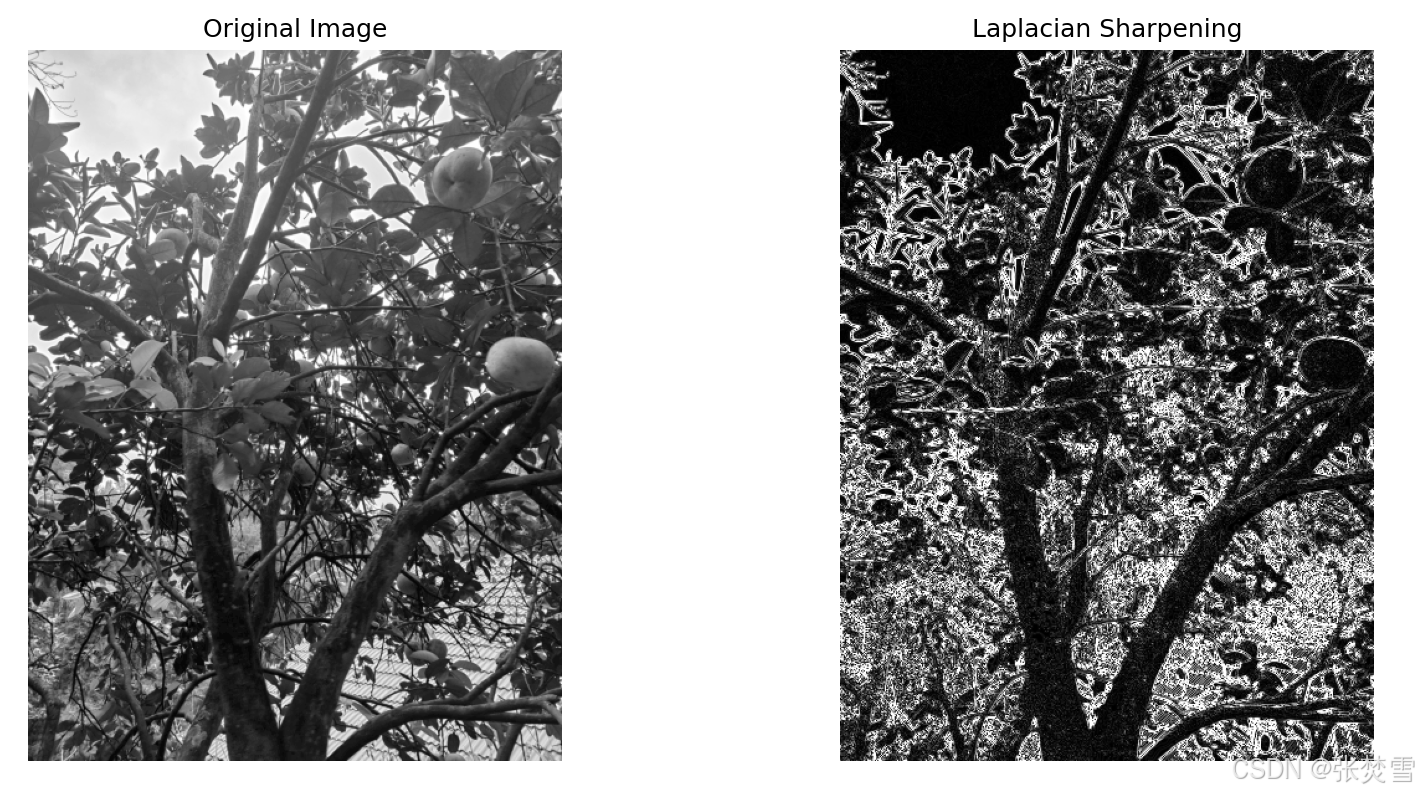
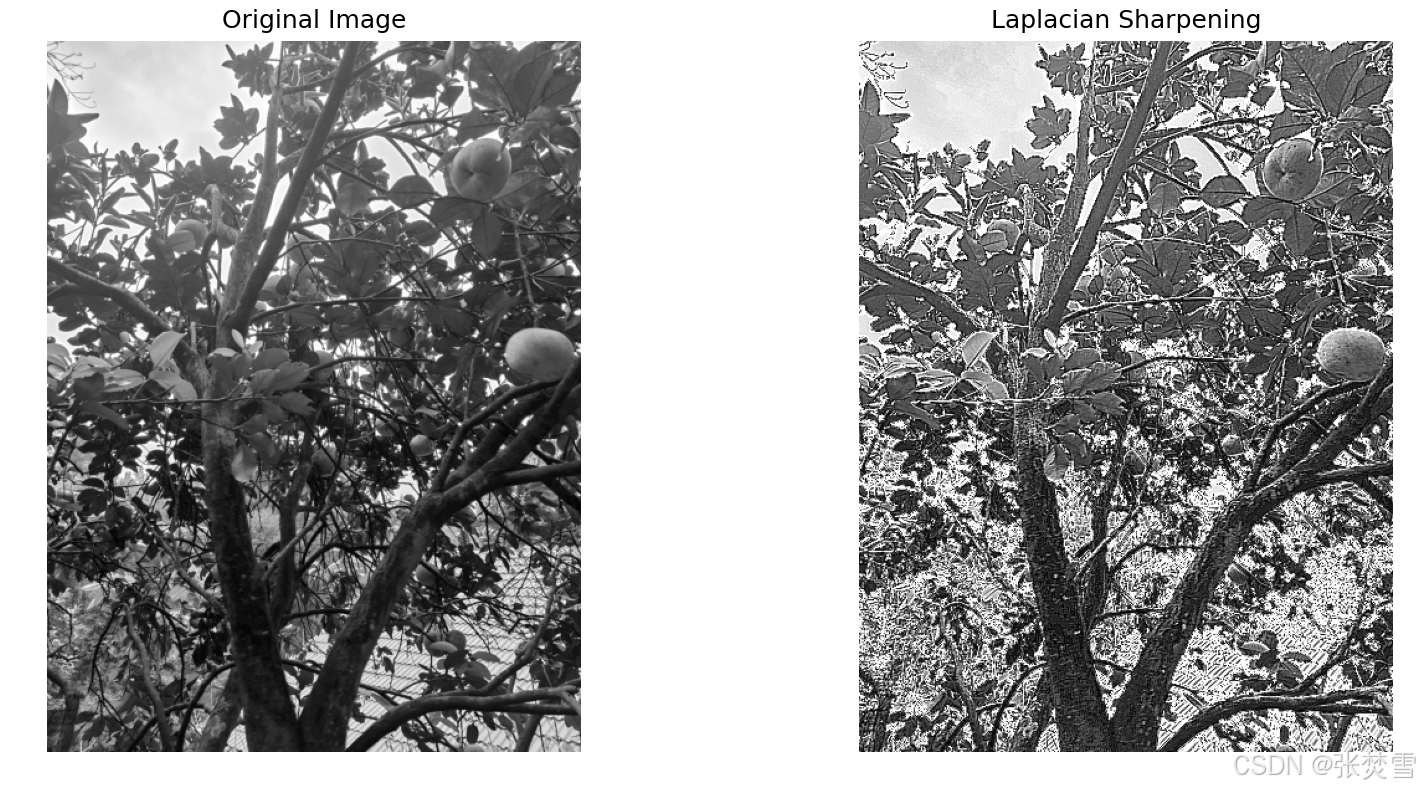
接着,我们为了增强最后Laplacian微分锐化的效果,我们可以对于刚才的模板进行修改,比如:
但要注意在修改这个模板时要注意配平,不然会出现问题。
刚才这个模板得到的结果如下:
为了展示效果,这里再提供一个未配平的模板,如下:
运用这个模板处理后的结果如下:(可以发现这个处理结果十分接近原图)
Wallis算法
如果对于刚才的这些模板中加入对数的处理,就可以得到Wallis算法,这种算法更接近人眼的视觉特性,得到的结果在暗区也可以很好处理,下面是一个模板举例:
处理结果如下:
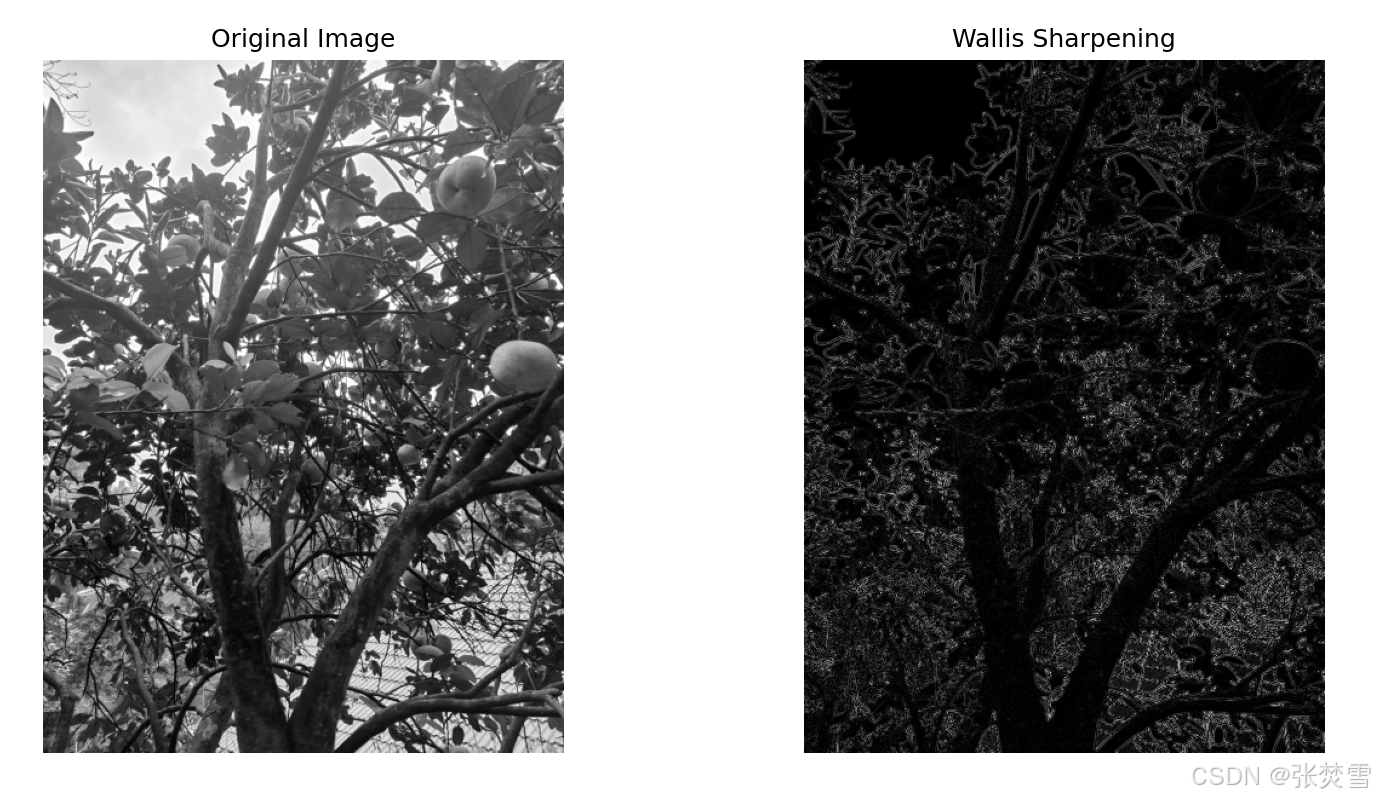
此上