目录
1.单纯形法的定义
单纯形法是一种基于几何顶点遍历的线性规划求解算法,其核心逻辑可概括为:
- 顶点择优原理:
- 线性规划的可行域构成凸多面体,最优解必出现在顶点(基可行解)上。
- 通过有限步迭代,从一个顶点沿目标函数改进方向移动到相邻顶点。
- 方向选择机制:
- 利用**检验数(Reduced Cost)**判断当前解的改进潜力。
- 若存在正检验数(最大化问题)或负检验数(最小化问题),则目标函数可继续优化。
- 终止条件:
- 所有检验数均不满足优化方向时达到最优解。
- 若发现无界方向(存在无限改进空间),则问题无界。
2.单纯形法的基本原理
2.1 核心步骤
第一步:将线性规划的标准型化成线性规划的规范型,来获得一个初始可行解。
第二步:对初始基可行解最优性判别,若最优,则停止;否则转下一步。
第三步:从初始基可行解向相邻的基可行解转换,使得目标值有所改善,重复第二步和第三步直至找到最优解。
2.2 步骤拆解
为更清楚地了解并操作单纯形法,必须要解决三个问题:
2.2.1 如何确定初始的基可行解?
首先我们先了解四个基本概念:
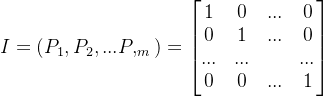
规范型:约束条件矩阵A中有一个单位矩阵I。
基:约束系数矩阵的A的秩为m,若A中的B是m*m的可逆矩阵,则称B为线性规划问题的一个基。
基解:对于基B,
中的其它列向量对应的决策变量称为非基变量。如果令非基变量为0,则称

基可行解:非负条件的基解称为基可行解。
认识了四个基本概念后,我们先将线性规划标准型为规范型,其中,系数矩阵
简单示例如下:
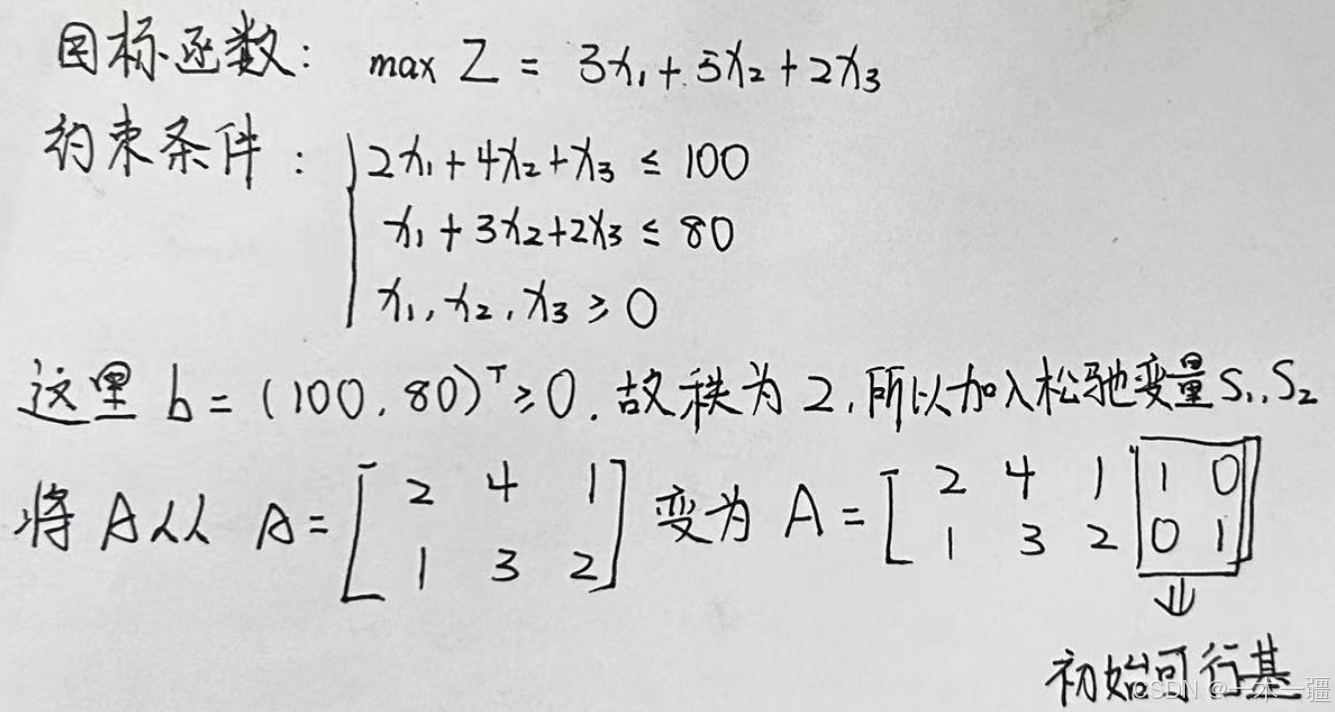
找到初始可行基,令非基变量取值为0,便得到一组基可行解。
上述示例的基可行解如下:

2.2.2 如何进行解的最优性判别?
首先我们先了解一个概念:
检验数

其计算公式为:
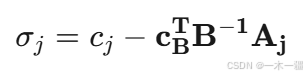
-
:非基变量
-
:基变量在目标函数中的系数向量
-
:基矩阵的逆矩阵
-
:非基变量
实例演算:

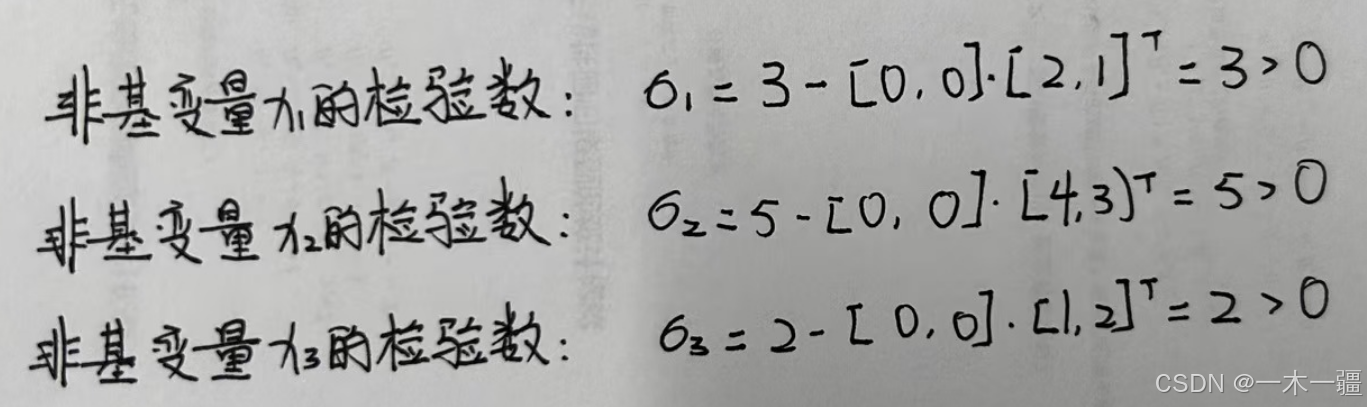
步骤1:计算初始检验数
实例演算:
步骤2:判别最优性
判别规则:
- 最大化问题(Max):若所有非基变量的
- 最小化问题(Min):若所有非基变量的
实例演算:
所有非基变量的检验数均
2.2.3 如何寻找改进的基可行解?
首先我们了解两个概念:
出基变量:从当前基变量中被移除的变量,其离基是为保证新解的可行性(非负约束)
入基变量:从非基变量中被选中加入基的变量,其引入将直接改进目标函数值
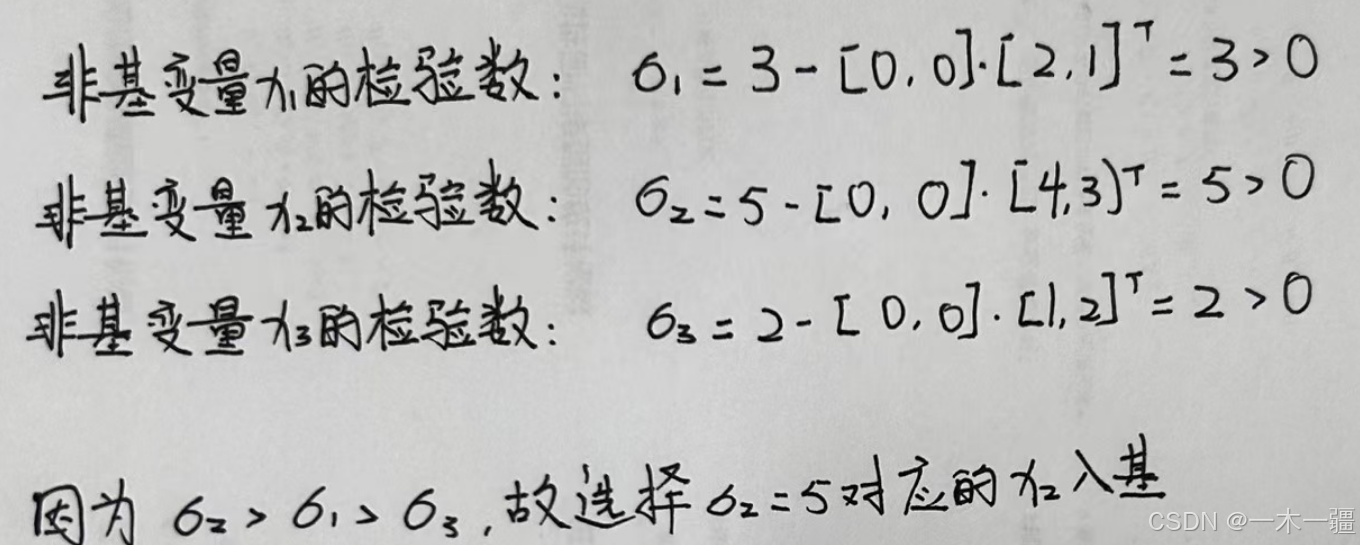
步骤一: 选择入基变量--选择最大正检验数对应的变量
实例演算:
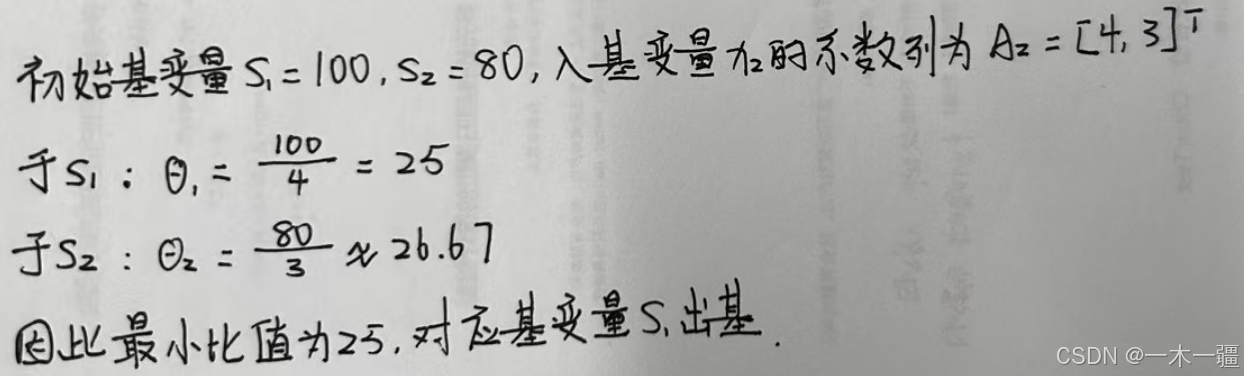
步骤二:选择出基变量,确保新解满足非负约束,通过 最小比值测试(Minimum Ratio Test)选择出基变量,其公式为:




实例演算:
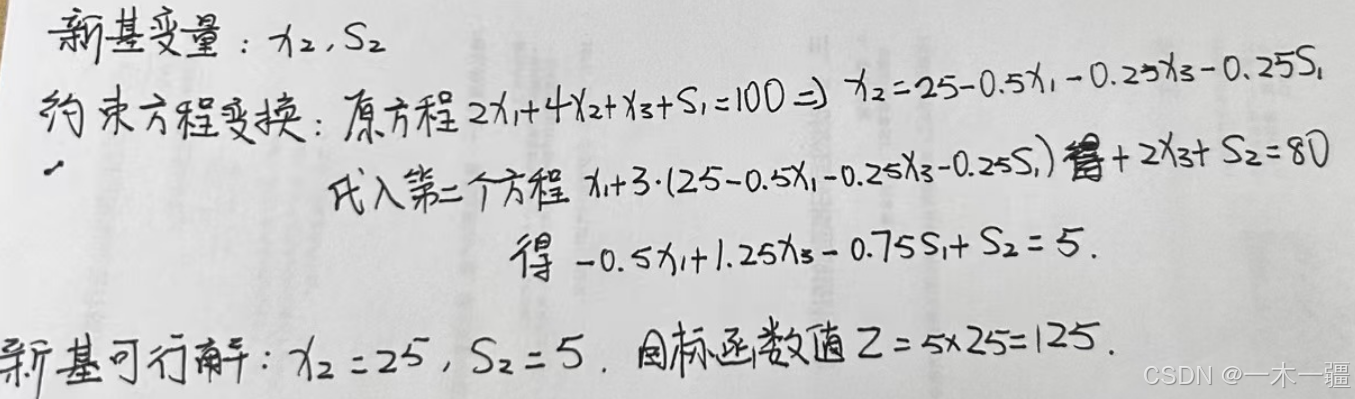
步骤三:基变换与解更新
操作:
- 构造新基矩阵:将入基变量
- 高斯消元:通过行变换将新基变量对应的列转换为单位向量
- 更新解:令非基变量为0,直接读取基变量取值
实例演算:
第一次操作完以上三步后,重复第二步和第三步直至找到最优解。
3.用matlab实现单纯形法
3.1 单纯形法算法代码
function [xm, fm, exitflag, iterations] = enhanced_simplex(c, A, b, max_iter)
% ENHANCED_SIMPLEX 改进版单纯形法
% 功能:解决标准形线性规划问题 min c'x s.t. Ax = b, x >= 0
% 新增特性:两阶段法、LU分解、Bland规则
%% ========== 输入参数校验与初始化 ==========
if nargin == 0 % 测试案例
c = [-3; -2; 0; 0];
A = [2, 1, 1, 0; 1, 2, 0, 1];
b = [4; 3];
max_iter = 500;
elseif nargin < 4
max_iter = 500;
end
[m, n] = size(A);
exitflag = -1; xm = []; fm = 0; iterations = 0;
% 维度一致性检查
if length(b) ~= m || length(c) ~= n
error('输入维度不匹配: A是%dx%d, b是%dx1, c是%dx1', m,n,length(b),length(c));
end
%% ========== 第一阶段:可行性检查 ==========
% 构造人工变量
phase1_A = [A, eye(m)];
phase1_c = [zeros(n,1); ones(m,1)];
artificial_basis = (n+1 : n+m)'; % 必须转为列向量
% 调用核心算法
[x_phase1, ~, exitflag_phase1] = core_simplex(phase1_c, phase1_A, b, artificial_basis, max_iter);
% 判断可行性
if exitflag_phase1 ~= 1 || any(abs(x_phase1(n+1:end)) > 1e-6)
disp('无可行解');
return;
end
%% ========== 第二阶段:优化原目标 ==========
basis = find(x_phase1(1:n) > 1e-6); % 提取有效基
if length(basis) ~= m
error('基变量数量不足,可能遇到退化问题');
end
[xm, fm, exitflag, iterations] = core_simplex(c, A, b, basis, max_iter);
end % 主函数结束
%% ========== 核心算法子函数 ==========
function [x_opt, f_opt, exitflag, iter] = core_simplex(c, A, b, basis, max_iter)
% CORE_SIMPLEX 核心单纯形算法实现
%% 初始化
[m, n] = size(A);
tol = 1e-10;
x_opt = zeros(n,1);
exitflag = -1;
iter = 0;
% 初始基校验
A_b = A(:,basis);
if rank(A_b) < m
error('初始基矩阵秩不足');
end
[L, U, P] = lu(A_b); % LU分解
%% 主循环
for iter = 1:max_iter
% 计算检验数
lambda = L' \ (U' \ c(basis));
reduced_cost = c' - lambda' * A;
% 最优性检查
if all(reduced_cost >= -tol)
x_b = U \ (L \ (P*b));
x_opt(basis) = x_b;
f_opt = c' * x_opt;
exitflag = 1;
return;
end
% Bland规则选择入基变量
s = find(reduced_cost < -tol, 1, 'first');
% 计算方向向量
As = A(:,s);
direction = U \ (L \ (P*As));
% 无界判断
if all(direction <= tol)
exitflag = 0;
return;
end
% 计算离基变量
x_b = U \ (L \ (P*b));
theta = x_b ./ direction;
theta(direction <= tol) = Inf;
[~, q] = min(theta);
% 更新基变量
basis(q) = s;
% 更新LU分解
A_b = A(:,basis);
[L, U, P] = lu(A_b);
end
exitflag = -1; % 超过迭代限制
end % 子函数结束 3.2 测试案例
% ========== 测试案例执行 ==========
c = [-3; -2; 0; 0];
A = [2, 1, 1, 0;
1, 2, 0, 1];
b = [4; 3];
[x, fval, flag] = enhanced_simplex(c, A, b);
% ========== 输出优化 ==========
disp('════════════════ 单纯形法求解结果 ════════════════');
fprintf('算法状态: %s\n', getExitStatus(flag)); % 状态解释
fprintf('迭代次数: %d\n', length(x)); % 显示实际迭代次数
disp('--------------------------------------------');
% 解向量分列显示(含变量类型标注)
var_types = {'x₁', 'x₂', 's₁', 's₂'}; % s表示松弛变量
disp('[最优解]');
for i = 1:length(x)
fprintf('%s = %8.4f\n', var_types{i}, x(i));
end
fprintf('\n目标函数值: %.4f → 原始问题等效为最大利润: %.2f\n',...
fval, -fval); % 转换为最大化问题解释
disp('══════════════════════════════════════════════');
% ========== 辅助函数:状态码转文字 ==========
function status = getExitStatus(flag)
switch flag
case 1, status = '找到最优解 ✅';
case 0, status = '问题无界解 ⚠️ (目标值趋向无穷)';
case -1, status = '无可行解 ❌';
otherwise, status = '未知状态';
end
end 输出的结果:
════════════════ 单纯形法求解结果 ════════════════
算法状态: 找到最优解
迭代次数: 4
--------------------------------------------
[最优解]
x₁ = 1.6667
x₂ = 0.6667
s₁ = 0.0000
s₂ = 0.0000
目标函数值: -6.3333 → 原始问题等效为最大利润: 6.33
══════════════════════════════════════════════
如有问题,可私信或在评论区交流,定即时回复,感谢支持!