ADC(Analog-Digital Converter)模拟-数字转换器
ADC可以将引脚上连续变化的模拟电压转换为内存中存储的数字变量,建立模拟电路到数字电路的桥梁 12位逐次逼近型ADC,1us转换时间
输入电压范围:0~3.3V,转换结果范围:0~4095
18个输入通道,可测量16个外部和2个内部信号源 规则组和注入组两个转换单元 模拟看门狗自动监测输入电压范围
STM32F103C8T6 ADC资源:ADC1、ADC2,10个外部输入通道
ADC逐次比较原理(通过比较器):

ADC结构框图:
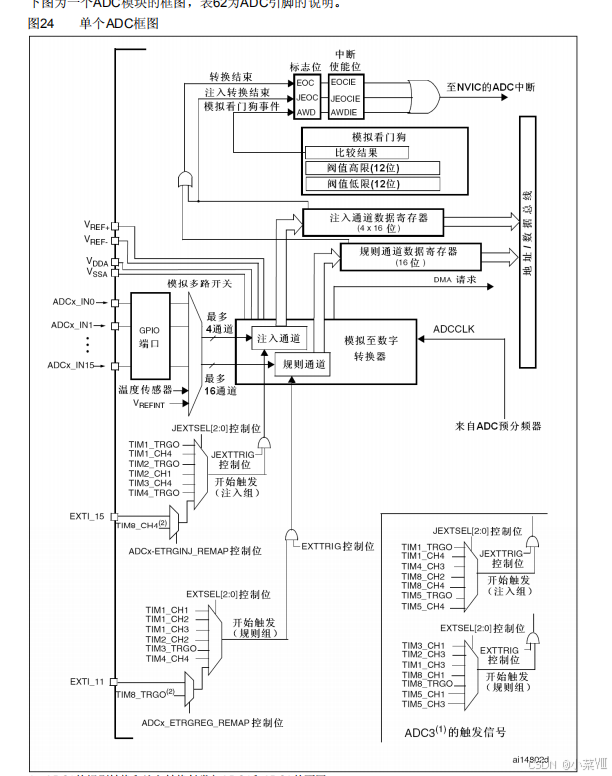
ADC基本结构:

输入通道ADC匹配 :

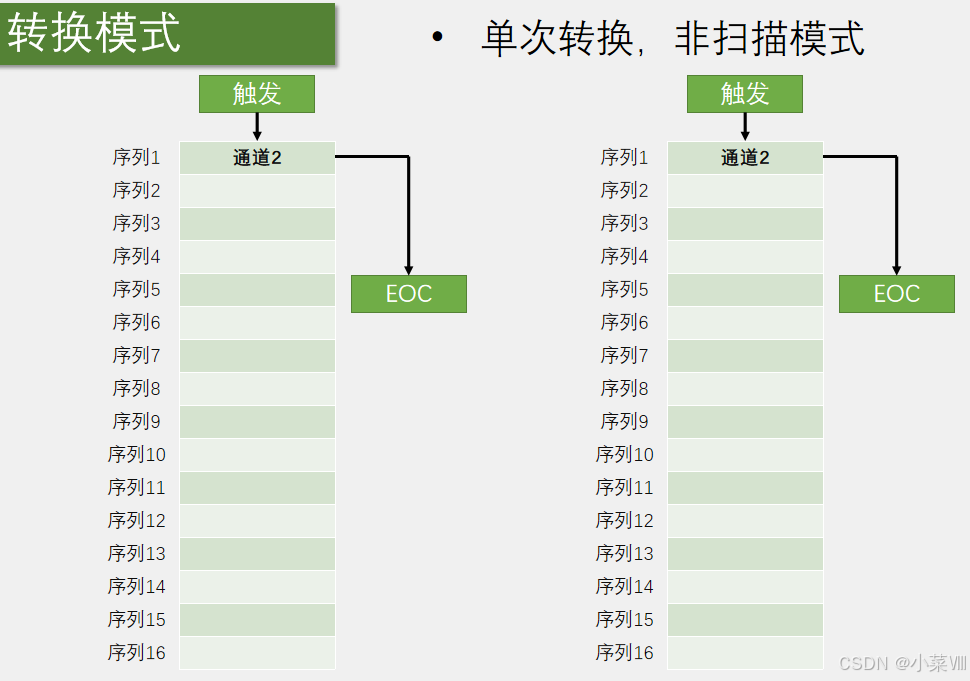
ADC四种转换模式:

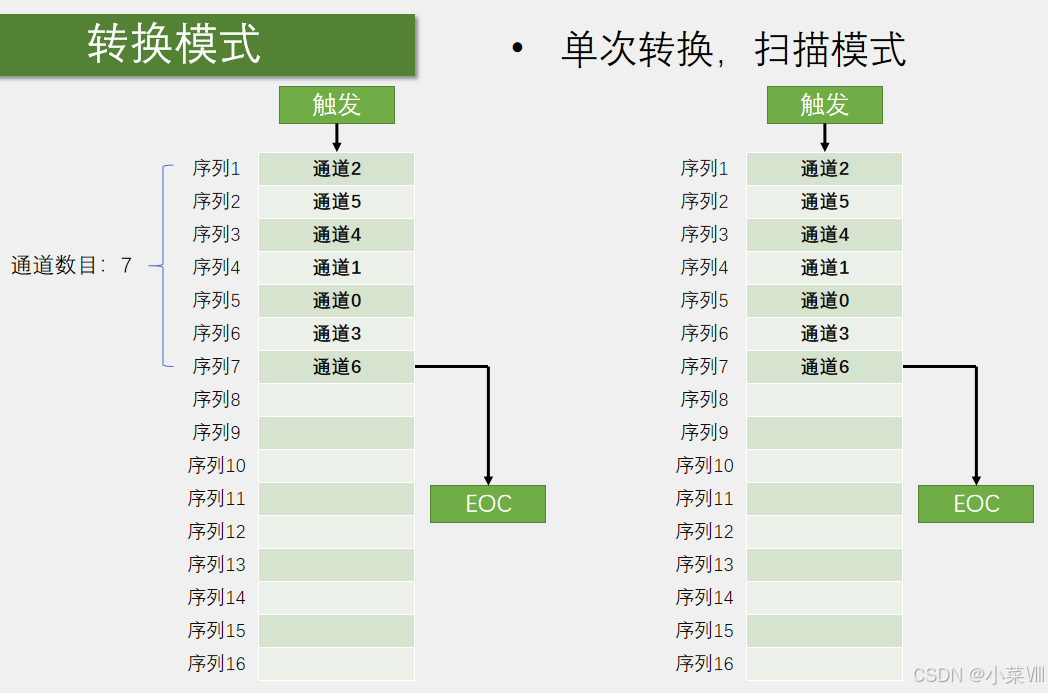
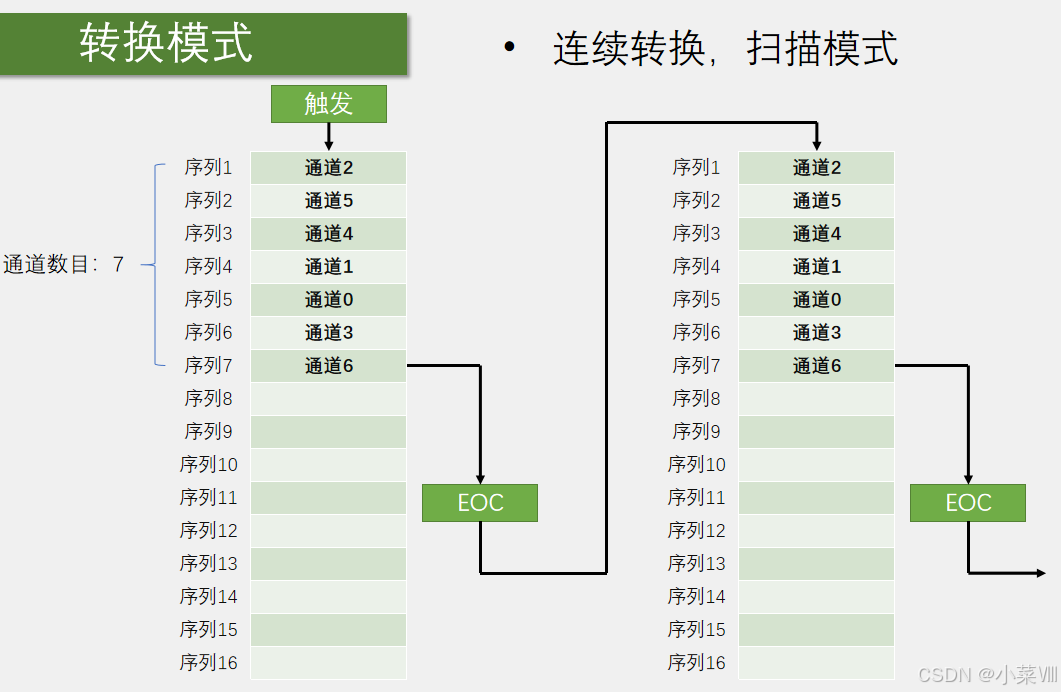
当需要使用扫描模式时,要避免数据的覆盖,需利用DMA转存数据
若需要多路通道时,可以采用非扫描模式,依次更改通道即可
数据对齐方式 :
1.左对齐(后四位为0,前面为数据,若需转成十进制要除2的4次方)
2.右对齐(前四位为0,可以直接转成十进制)
校准模式:
配置过程:
RCC(开启时钟)→GPIO(初始化,AIN模式)→规定通道(若单通道可以直接放在初始化中,多路时可放在获取AD值函数中)→AD转换器(初始化)→开关控制(CMD)
单路通道:
#include "stm32f10x.h" // Device header
void AD_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div8);
ADC_RegularChannelConfig(ADC1,ADC_Channel_0,1,ADC_SampleTime_28Cycles5);
ADC_InitTypeDef ADC_InitStruct;
ADC_InitStruct.ADC_ContinuousConvMode=DISABLE;
ADC_InitStruct.ADC_DataAlign=ADC_DataAlign_Right;
ADC_InitStruct.ADC_ExternalTrigConv=ADC_ExternalTrigConv_None;
ADC_InitStruct.ADC_Mode=ADC_Mode_Independent;
ADC_InitStruct.ADC_NbrOfChannel=1;
ADC_InitStruct.ADC_ScanConvMode=DISABLE;
ADC_Init(ADC1,&ADC_InitStruct);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AIN;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_0;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
ADC_Cmd(ADC1,ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1)==SET);
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1)==SET);
}
uint16_t Get_AD(void)
{
ADC_SoftwareStartConvCmd(ADC1,ENABLE);
while(ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC)==RESET);
return ADC_GetConversionValue(ADC1);
}
多路通道:
#include "stm32f10x.h" // Device header
void AD_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div8);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AIN;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
ADC_InitTypeDef ADC_InitStruct;
ADC_InitStruct.ADC_ContinuousConvMode=DISABLE;
ADC_InitStruct.ADC_DataAlign=ADC_DataAlign_Right;
ADC_InitStruct.ADC_ExternalTrigConv=ADC_ExternalTrigConv_None;
ADC_InitStruct.ADC_Mode=ADC_Mode_Independent;
ADC_InitStruct.ADC_NbrOfChannel=1;
ADC_InitStruct.ADC_ScanConvMode=DISABLE;
ADC_Init(ADC1,&ADC_InitStruct);
ADC_Cmd(ADC1,ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1)==SET);
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1)==SET);
}
uint16_t Get_ADValue(uint8_t ADC_Channel)
{
ADC_RegularChannelConfig(ADC1,ADC_Channel,1,ADC_SampleTime_28Cycles5);
ADC_SoftwareStartConvCmd(ADC1,ENABLE);
while(ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC)==RESET);
return ADC_GetConversionValue(ADC1);
}