文章目录
指纹定位
指纹定位技术简介
指纹定位是一种基于无线信号强度(RSSI)或其他信号特征进行室内定位的技术。这种方法借助于环境中的特征信号(如 Wi-Fi 信号、蓝牙信号等)来确定移动设备的位置。指纹定位技术广泛应用于室内导航、资产跟踪和智能家居等场景。
基本原理
指纹定位主要分为两个阶段:离线阶段和在线阶段。
-
离线阶段:
- 在环境中(如建筑物内部)进行信号强度测量,收集不同位置的信号特征,这些特征被称为“指纹”。
- 记录的特征包括信号强度、信号源的 MAC 地址、时间戳等。这些数据将形成一个数据库,用于后续的定位。
-
在线阶段:
- 移动设备在未知位置时,接收周围信号,并测量特征信号的强度。
- 将测得的信号强度与离线阶段收集的指纹数据库进行匹配,从而估算出移动设备的位置。
位置估算公式
在指纹定位中,位置的估算通常基于信号强度与实际位置之间的关系。这里介绍几种常用的定位算法和公式。
1. 最近邻居算法(KNN)
设定离线阶段收集的指纹数据库为 D = { ( P i , S i ) } D=\{(P_i,S_i)\} D={(Pi,Si)},其中 P i P_i Pi为位置坐标, S i S_i Si为信号特征
向量。在线阶段测得的信号特征为 S m e a s u r e d S_{measured} Smeasured 。
KNN 算法通过计算测量信号与数据库中每个信号的距离,找到最近的 k k k个邻居,位置估算公
式为:
P e s t i m a t e d = 1 k ∑ j = 1 k P j P_{estimated}=\dfrac{1}{k}\sum_{j=1}^kP_j Pestimated=k1j=1∑kPj
其中 P j P_j Pj是最近的 k k k个邻居的位置。
2. 加权最近邻居算法(W-KNN)
在 KNN 的基础上,W-KNN 考虑到信号强度的不同权重。设定权重为信号强度的倒数,公式
为:
P e s t i m a t e d = ∑ j = 1 k P j d j ∑ j = 1 k 1 d j P_{estimated}=\frac{\sum_{j=1}^k\frac{P_j}{d_j}}{\sum_{j=1}^k\frac{1}{d_j}} Pestimated=∑j=1kdj1∑j=1kdjPj
其中 d j d_j dj是测量信号与邻居 j j j之间的距离。
3. 最小二乘法(LS)
最小二乘法通过最小化测量信号与实际信号之间的误差来估算位置。设
S
m
e
a
s
u
r
e
d
S_{measured}
Smeasured为测量信
号向量,
S
p
r
e
d
i
c
t
e
d
(
P
)
S_{predicted}(P)
Spredicted(P)为根据位置
P
P
P预测的信号向量,目标是最小化以下目标函数:
E ( P ) = ∥ S m e a s u r e d − S p r e d i c t e d ( P ) ∥ 2 E(P)=\|S_{measured}-S_{predicted}(P)\|^2 E(P)=∥Smeasured−Spredicted(P)∥2
最终位置 P P P通过求解下面的方程获得:
P e s t i m a t e d = arg min E ( P ) P_{estimated}=\arg\min_E(P) Pestimated=argEmin(P)
应用场景
指纹定位技术适用于多个场景,包括:
- 室内导航:在大型建筑(如商场、机场)内提供实时导航服务。
- 资产跟踪:在仓库或工厂中跟踪设备和人员的位置。
- 智能家居:根据用户的位置自动调整环境设置(如灯光、温度等)。
优缺点
优点
- 高精度:在复杂环境中,指纹定位可以提供较高的定位精度。
- 适应性强:可以与现有的无线网络基础设施结合使用,降低了部署成本。
缺点
- 环境依赖性:指纹数据库需要根据环境变化进行更新。
- 初期部署复杂:离线阶段数据收集和指纹数据库构建需要时间和资源。
总结
指纹定位是一种强大的室内定位技术,通过无线信号特征进行位置估算。它在许多实际应用中表现出色,但也面临一些挑战。了解其基本原理和算法,对于从事相关研究和应用开发的人员来说至关重要。
源代码
代码运行
运行方法
源代码复制到MATLAB的空脚本,即可运行,源代码如下:
运行结果
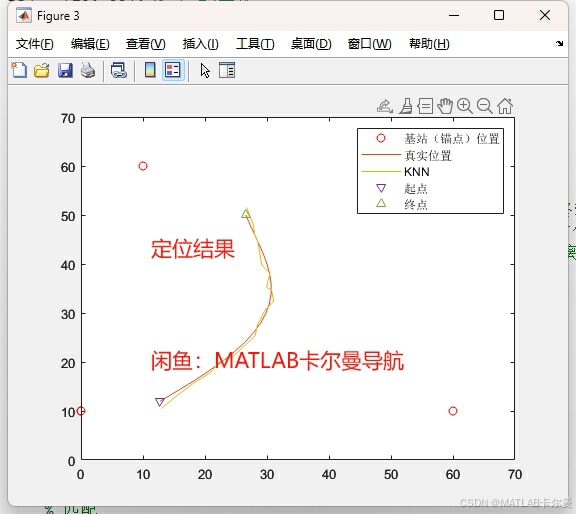
真实轨迹和估计轨迹对比如下:
估计误差的图像(误差时序图)如下:

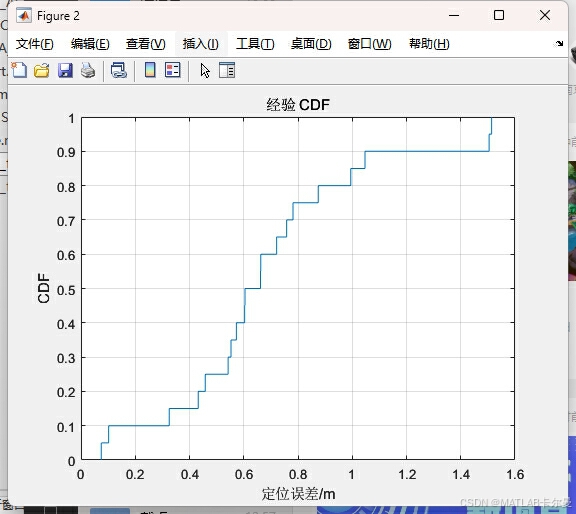
估计误差的CDF图像如下:
估计误差的最大值在命令行窗口输出,如下:
代码获取
% 指纹定位 KNN,二维四个基站
% 2024-10-9/Ver1
clc; % 清空命令窗口
clear; % 清空工作区变量
close all; % 关闭所有图形窗口
rng(0); %固定随机因子
%% 定义基站位置
BS1 = [0, 10]; % 基站1坐标
BS2 = [60, 10]; % 基站2坐标
BS3 = [60, 60]; % 基站3坐标
BS4 = [10, 60]; % 基站4坐标
BS = [BS1;BS2;BS3;BS4];
std_var = 0.1; % RSSI测量的标准差
A = [BS1; BS2; BS3; BS4]; % 将基站坐标组合成矩阵
pd0 = 100; % 信号强度的参考值
n = 5; % 距离衰减因子
times = 5; % 每个基站的RSSI测量次数(收集指纹)
t = 20; % 总时间
% 剩余代码下载链接:https://mbd.pub/o/bread/Zp2XmZdt