自从发布极端天气目标检测的博客, 得知有许多小伙伴需要极端天气数据集,因此制作收集了道路环境雾天数据集。
雾霾驾驶数据集已更新。它现在还包含雾驾驶密集子集中21幅浓雾图像的路径列表。
雾状驾驶数据集+语义分割
本文提出了两个不同的数据集,用于对雾场景的语义理解:雾城市景观和雾驾驶。
雾霾城市景观源自城市景观数据集,由我们提出的雾霾模拟生成的合成雾霾图像组成,这些图像自动继承了真实、清晰的对应物的语义注释。相反,本博客提供了以下降噪深度图和透射率图的辅助雾城市景观模式:
雾天驾驶是101个真实世界雾天道路场景的集合,带有语义分割和对象检测注释,用作雾天领域的基准。我们为19个城市景观评估类别提供这些图像的密集像素级语义注释。还可以使用属于上述8个类中对应于人类或车辆的对象的边界框注释。
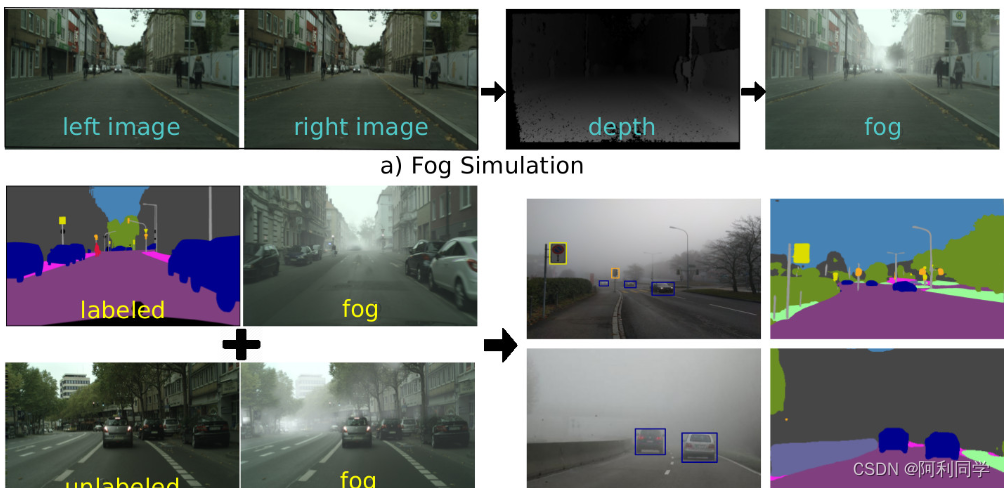

本人为真实的室外场景搜集了雾模拟管道,并将其应用于城市景观数据集中的25000张完整图像集,以获得雾城市景观。我们还从最初的3475张城市景观图像中定义了一组550张训练+验证的城市景观图像,这些图像产生了高质量的合成雾。最终收集到的550幅雾图像被称为“雾城市景观”。

l另外本文为5000张训练+验证+测试城市景观图像提供了三种不同版本的雾城市景观,每种图像都具有恒定的衰减系数,该系数决定雾密度和能见度范围。衰减系数的值为0.005、0.01和0.02m-1,分别对应600、300和150m的能见度范围。对于20000张额外训练的城市景观图像,我们提供了一个衰减系数为0.01m-1的单一版本
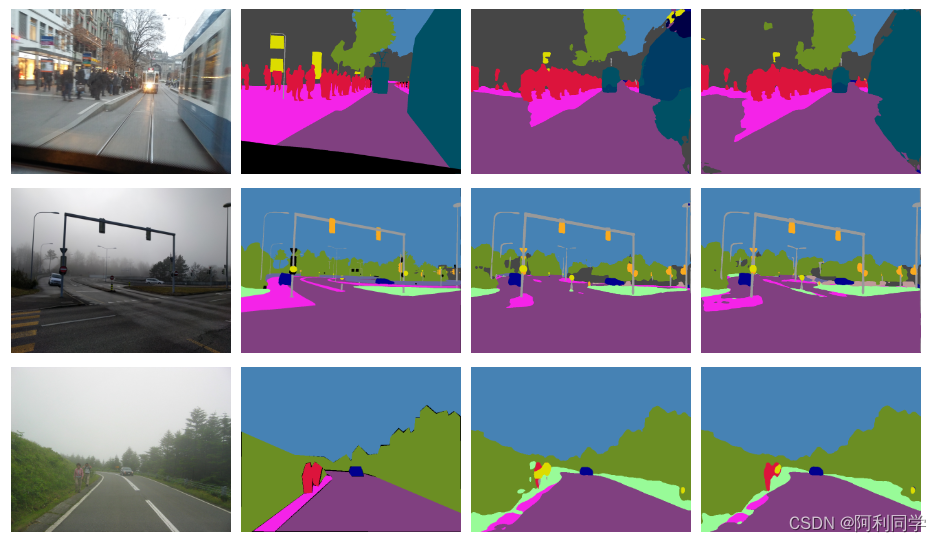
雾天驾驶由101幅彩色图像组成,描绘了真实的雾天驾驶场景。其中51幅图像是在苏黎世不同地区的雾天条件下用手机摄像头拍摄的,其余50幅图像是从网上收集的。数据集中的最大图像分辨率为960x1280像素。
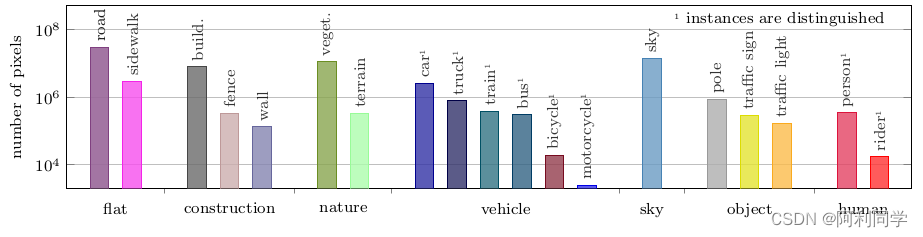
Foggy Driving为一组19个类提供像素级语义注释,用于城市景观中的评估。上述集合中与人类或车辆相对应的8个类的单独实例被单独标记,这为这些类提供了边界框注释。
总共包含500多辆带注释的车辆和近300名带注释的人类。鉴于其适度规模,该数据集用于评估目的,我们建议不要使用其注释来训练语义分割或对象检测模型。示例图像及其语义注释以及总体注释统计信息如下所示。
**数据交流 私信会回