坐标系及其转换在计算机视觉领域占据核心地位。理解如何从一个坐标系转换到另一个坐标系,不仅是理论上的需要,也是实际应用中不可或缺的技能。
一、世界坐标系的定义
世界坐标系是一个全局的坐标系统,用于定义场景中物体的位置。在这个坐标系中,每个物体的位置都是相对于一个全局原点来描述的,单位是m,任意一点的坐标表示为![P_{w} = \left [ X_{w}, Y_{w}, Z_{w} \right ]^{T}](/image/aHR0cHM6Ly9sYXRleC5jc2RuLm5ldC9lcT9QXyU3QnclN0QlMjAlM0QlMjAlNUNsZWZ0JTIwJTVCJTIwWF8lN0J3JTdEJTJDJTIwWV8lN0J3JTdEJTJDJTIwWl8lN0J3JTdEJTIwJTVDcmlnaHQlMjAlNUQlNUUlN0JUJTdE)
二、相机坐标系的定义
相机坐标系是相对于相机的位置来定义物体的坐标系统。在这个坐标系中,原点通常位于相机的光心,即相机镜头的中心。Z轴通常与相机的观察方向一致,与成像平面垂直,X和Y轴定义相机平面,就是以光圈O为原点的右手坐标系,与世界坐标系位于同一空间,只是位置和方向不同,单位是m,任意一点的坐标表示为![P_{c} = \left [ X_{c}, Y_{c}, Z_{c} \right ]^{T}](/image/aHR0cHM6Ly9sYXRleC5jc2RuLm5ldC9lcT9QXyU3QmMlN0QlMjAlM0QlMjAlNUNsZWZ0JTIwJTVCJTIwWF8lN0JjJTdEJTJDJTIwWV8lN0JjJTdEJTJDJTIwWl8lN0JjJTdEJTIwJTVDcmlnaHQlMjAlNUQlNUUlN0JUJTdE)
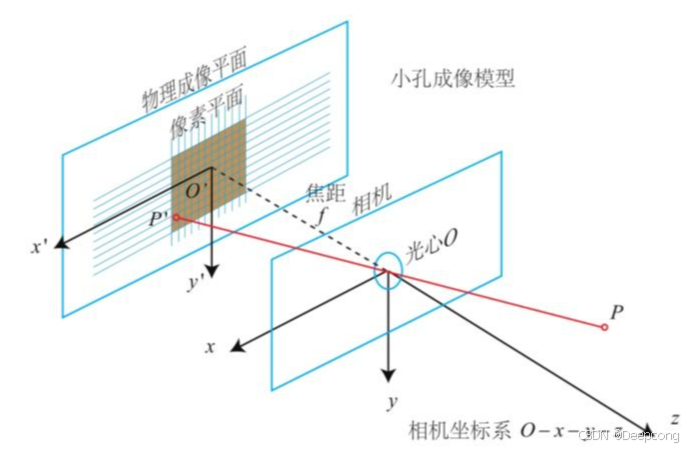
三、图像物理坐标系的定义
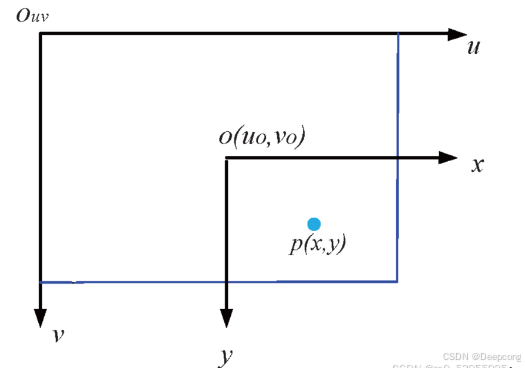
如二中图所示,物理成像平面上的坐标系就是图像物理坐标系,是一个二维坐标系,原点在成像平面的中心,单位是mm,相当于用物理单位描述像素的位置,其中任意一点的坐标可表示为![p = \left [ x, y \right ]^{T}](/image/aHR0cHM6Ly9sYXRleC5jc2RuLm5ldC9lcT9wJTIwJTNEJTIwJTVDbGVmdCUyMCU1QiUyMHglMkMlMjB5JTIwJTVDcmlnaHQlMjAlNUQlNUUlN0JUJTdE)
四、像素平面坐标系的定义
像素坐标系是图像上的二维坐标系统,用于定义图像上每个像素的位置。原点通常位于图像的左上角,X轴从左到右延伸,Y轴从上到下延伸,单位是像素,从图像物理坐标系到像素平面坐标系存在一个缩放和平移,其中任意一点的坐标表示为![p = \left [ u, v \right ]^{T}](/image/aHR0cHM6Ly9sYXRleC5jc2RuLm5ldC9lcT9wJTIwJTNEJTIwJTVDbGVmdCUyMCU1QiUyMHUlMkMlMjB2JTIwJTVDcmlnaHQlMjAlNUQlNUUlN0JUJTdE)
五、世界坐标系到像素平面坐标系的转换
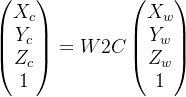
5.1 先从世界坐标系转换到相机坐标系
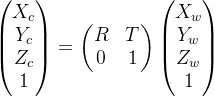
二者处于同一空间,所以只需要平移和旋转,通过


其中:



从世界坐标系转换到相机坐标系最终的转换公式如下(涉及到齐次坐标,有空更新):
这一步完成后,就得到点在相机坐标系中的坐标
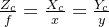
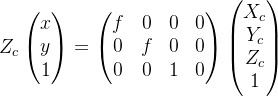
5.2 从相机坐标系到图像物理坐标系
相似那部分重点查看,这篇文章。
根据相似三角形得到的关系式如下:

齐次坐标表示:
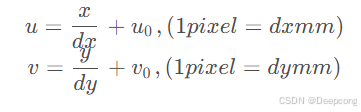
5.3 从图像物理坐标系到像素坐标系
像素坐标系和图像坐标系都在成像平面上,只是各自的原点和度量单位不一样。
图像坐标系的原点为相机光轴与成像平面的交点,通常情况下是成像平面的中点;
像素坐标系的原点在成像平面的左上角;
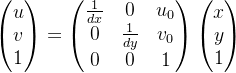
图像坐标系的单位是mm,是物理单位,而像素坐标系的单位是pixel,我们平常描述一个像素点都是几行几列。所以这两者之间的转换关系如下:
齐次坐标表示:
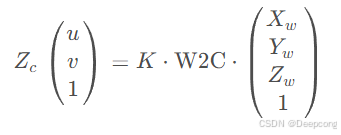
将以上步骤结合在一起,可以得到从世界坐标系到图像坐标系的完整转换公式:
综上所述,存在的疑惑就是:
1、世界坐标系怎么确定?
分不分静态的相机和运动的相机?

2、相机内参,外参怎么样计算?
相机内参的获取通常通过相机标定过程来实现。
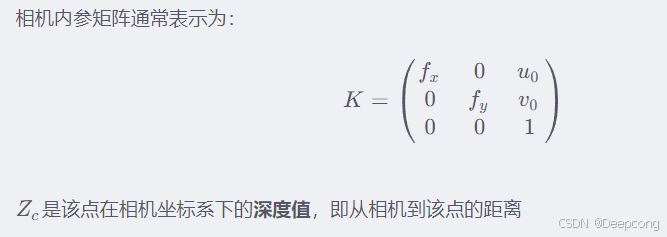
相机内参的定义和作用
相机内参是与相机自身特性相关的参数,主要包括参数矩阵(如fx, fy, cx, cy)以及畸变参数(如k1, k2, k3, p1, p2)。这些参数在相机出厂时通常已被标定,并存储在设备的Flash中。,帮助将三维世界坐标转换到二维图像坐标。
获取相机内参的方法
-
通过相机标定获取内参:最常见的获取相机内参的方法是通过相机标定。标定过程通常使用棋盘格等标定图案,通过图像处理和数学计算来估算内参。具体步骤包括拍摄多张标定图案的图片,使用标定算法(如张正友标定法)计算内参。
-
使用现成的标定工具或软件:许多相机厂商提供了标定工具或软件,用户可以通过这些工具进行标定以获取相机的内参。例如,OpenCV提供了丰富的相机标定函数,用户可以通过编写代码实现标定过程。
-
通过API获取:一些相机设备在出厂时已经标定好内外参,并存储在设备的Flash中。用户可以通过调用设备的API获取这些参数,而无需重新标定。
参考:
https://zhuanlan.zhihu.com/p/128155013
https://blog.csdn.net/m0_51661400/article/details/141395396
世界坐标系到像素坐标系的转换_世界坐标系转相机坐标系-CSDN博客
https://zhuanlan.zhihu.com/p/356546894