一、概述
因为在对代码进行了解之后,需要运行过程中对代码进行调试,因而需要配置cartographer的Debug配置。
二、具体实现
(一)版本
使用Ubuntu20.04,vscode,ros-noetic,cartographer
(二)CMakeLists.txt文件设置
需要将下载下来的全部文件夹中的CMakeLists.txt文件全部添加上下面这句话。
SET(CMAKE_BUILD_TYPE Debug)如图所示。
(三)编译
在终端中输入下面的命令,即可进行编译,在最后添加上了debug的编译选项。
catkin_make_isolated --install --use-ninja -DFORCE_DEBUG_BUILD=True
如图所示。
(四)vscode进行Debug
用vscode打开cartographer进行,文件夹下面会出现.vscode文件夹,如图所示。
在里面新建launch.json文件,里面如下内容所示。需要注意的是target是需要调试的launch文件名称,要更改为自己的文件。
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "ROS: Launch",
"request": "launch",
"target": "/home/gfcguo/test/alorgithm/CartographerSLAM/src/cartographer_ros/cartographer_ros/launch/backpack_2d.launch",
"type": "ros"
}
]
}(五)实际效果演示
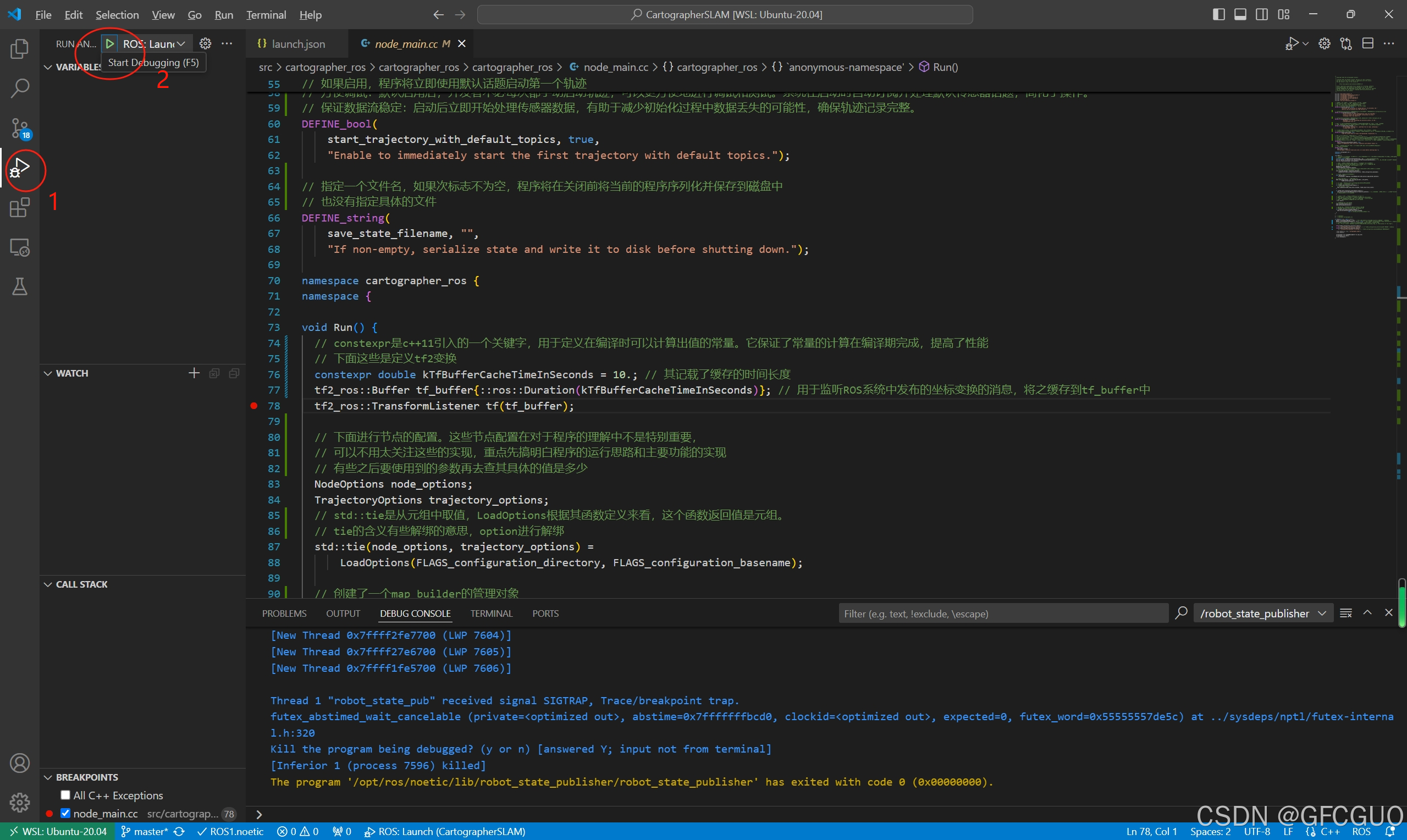
如图所示,我们随意设置一个端点,如图所示。
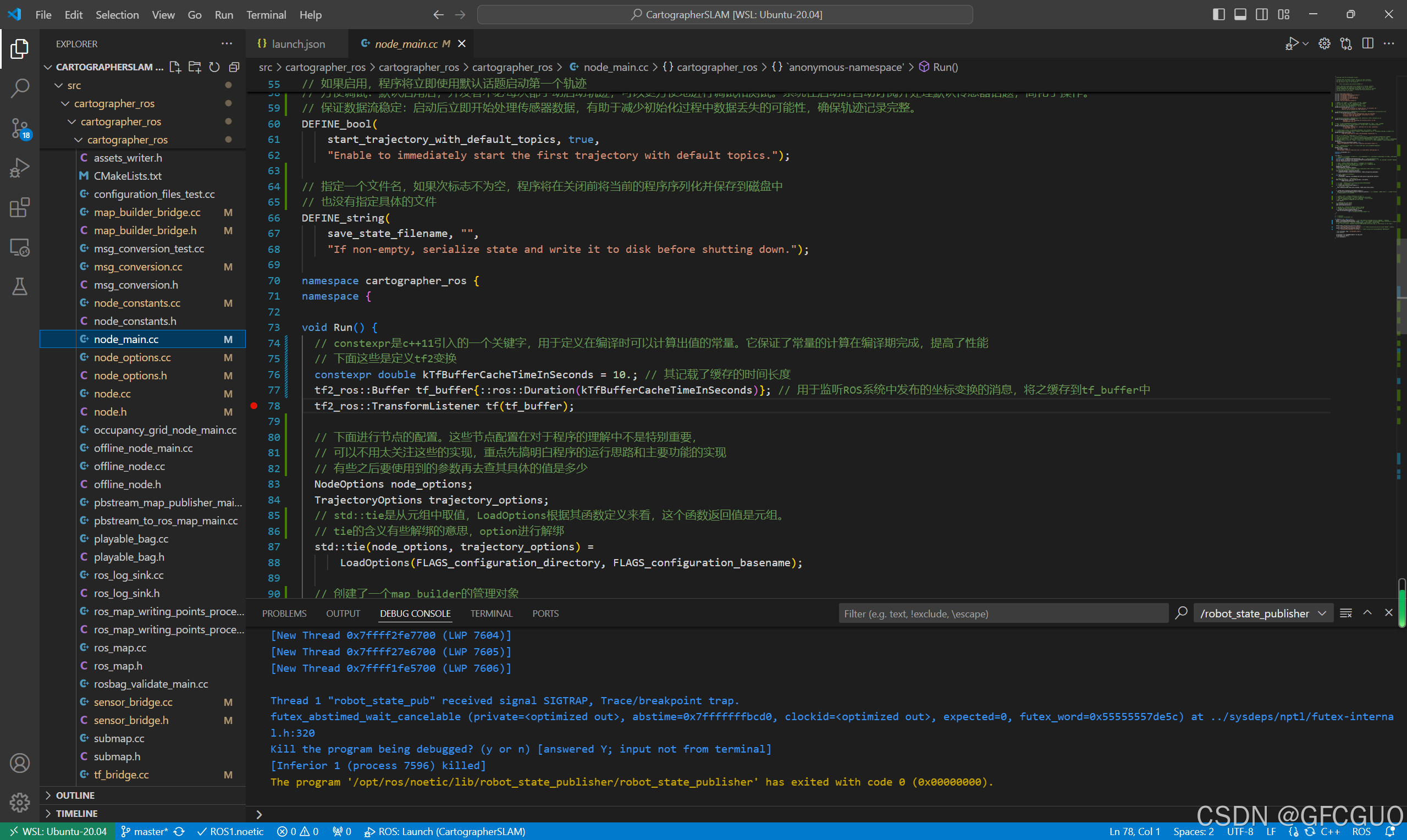
按照下面的进行Debug,即可成功运行
(六)参考
之前自己所记录的vscode进行Debug的操作
使用vscode对ROS代码进行debug_vscode ros debug-CSDN博客
参考别人的过程。