渐进分析
【2010-THU-Mid】f(n) = O(g(n)),当且仅当g(n) = Ω(f(n))。(√)
【2010-THU-Mid】若f(n) = O(n^2)且g(n) = O(n),则以下结论正确的是(AD)
A. f(n) + g(n) = O(n^2)B. f(n) / g(n) = O(n)
C. g(n) = O(f(n))
D. f(n) * g(n) = O(n^3)
考虑f(n) = 1,g(n) = 1/n,BC错
【2010-THU-Mid】算法g(n)的复杂度为Θ(n)。若算法f(n)中有 5 条调用g(n)的指令,则f(n)的复杂度为(D)
A. Θ(n)B. O(n)
C. Ω(n)
D. 不确定
【2010-THU-Mid】给出函数F(n)复杂度的紧界(假定int字长无限,移位属基本操作,且递归不会溢出)
void F(int n) //O( ) { for(int i = 0, j = 0; i < n; i += j, j++); } /*---------------------------------------------------------------------*/ void F(int n) //O( ) { for (int i = 1; i < n; i = 1 << i); } /*---------------------------------------------------------------------*/ int F(int n) //O( ) { return (n < 4) ? n : F(n >> 1) + F(n >> 2); } /*---------------------------------------------------------------------*/ int F(int n) //O( ) { return (n == 0) ? 1 : G(2, F(n ‐ 1)); } /*---------------------------------------------------------------------*/ int G(int n, int m) { return (m == 0) ? 0 : n + G(n, m ‐ 1); } /*---------------------------------------------------------------------*/ int F(int n) //O( ) { return G(G(n ‐ 1)); } /*---------------------------------------------------------------------*/ int G(int n) { return (n == 0) ? 0 : G(n ‐ 1) + 2 * n ‐ 1; } /*---------------------------------------------------------------------*/ void F(int n) { //O( ) for (int i = 1; i < n; i++) for (int j = 0; j < n; j += i); } /*---------------------------------------------------------------------*/ void F(int n) { //expected‐O( ) for (int i = n; 0 < i; i‐‐) if (0 == rand() % i) for (int j = 0; j < n; j++); }
向量
【2010-THU-Mid】对有序向量做Fibonacci查找,就最坏情况而言,成功查找所需的比较次数与失败查找相等。(√)
【2010-THU-Mid】对于同一有序向量,每次折半查找绝不会慢于顺序查找。(×)
【2010-THU-Mid】现有长度为 15 的有序向量A[0..14],各元素被成功查找的概率如下:
若采用二分查找算法,试计算该结构的平均成功查找长度。

列表
【2010-THU-Mid】无论有序向量或有序列表,最坏情况下均可在O(logn)时间内完成一次查找。(√)
跳表
【2013-THU-Fin】n个节点的跳转表期望高度为O(logn)。(√)
【2013-THU-Fin】跳转表若变成投掷骰子上面为六才上升一层,则纵向移动变大。(×)
【2014-THU-Fin】跳转表若变成投掷骰子上面为六才上升一层,对于同样存放n个元素的跳转表而言,(A)的期望值将有所增长,但仍保持O(1)。
A. 查找过程中,在同一高度连续跳转的次数
B. 查找过程中,由“向右”到“向下”转折的次数
C. 查找过程中,沿同一座塔连续下行的层数
D. (在查找定位之后)为创建一座新塔所需的时间
【2016,2018-THU-Fin】在n个节点的跳转表中,塔高的期望值为Θ(logn)。(√)
栈与队列
【2010-THU-Mid】对不含括号的中缀表达式求值时,操作符栈的容量可以固定为某一常数。(√)
操作符栈里最多2个元素
【2010-THU-Mid】RPN中各操作数的相对次序,与原中缀表达式完全一致。(√)
语法分析树的中序遍历序列和后序遍历序列
【2010-THU-Mid】共有(C)种栈混洗方案,可使字符序列{'x', 'o', 'o', 'o', 'x'}的输出保持原样。
A. 12B. 10
C. 6
D. 5
- push pop | push pop push pop push pop | push pop
- push pop | push push pop pop push pop | push pop
- push pop | push pop push push pop pop | push pop
- push pop | push push push pop pop pop | push pop
- push pop | push push pop push pop pop | push pop
- push push push push push pop pop pop pop pop
【2010-THU-Mid】考查表达式求值算法。算法执行过程中的某时刻,若操作符栈中的括号多达 2010 个,则此时栈的规模(含栈底的'\0')至多可能多大?试说明理由,并示意性地画出当时栈中的内容。
至多6033个
[ \0, +, *, (, +, *, (, +, *, ... >
【2018-912】非法表达式(12)3+!4*+5执行evaluate算法后的结果为(89)。
输入缓冲 操作数栈 操作符栈 动作 (12)3+!4*+5$ $ 识别到开始符 12)3+!4*+5$ $ ( 识别到(,栈顶为$,栈顶<当前,(入栈 )3+!4*+5$ 12 $ 12入栈(readNumber函数识别最长操作数字符串) 3+!4*+5$ 12 $ 识别到),栈顶为(,脱括号,推进一个字符 +!4*+5$ 12 3 $ 3入栈 !4*+5$ 12 3 $ + +入栈 4*+5$ 12 3 $ + ! 识别到!,栈顶为+,栈顶<当前,!入栈 *+5$ 12 3 4 $ + ! 4入栈 *+5$ 12 3 24 $ + 识别到*,栈顶为!,栈顶>当前,执行! +5$ 12 3 24 $ + * 识别到*,栈顶为+,栈顶<当前,*入栈 +5$ 12 72 $ + 识别到+,栈顶为*,栈顶>当前,执行* +5$ 84 $ 识别到+,栈顶为+,栈顶>当前,执行+ 5$ 84 $ + +入栈 $ 84 5 $ + 5入栈 $ 89 $ 识别到$,栈顶为+,栈顶>当前,执行+ $ 89 识别到$,栈顶为$,栈顶=当前,$出栈 $ 89 操作符栈为空,while循环退出,得89
【2019-THU-Mid】共有(B)种栈混洗方案,可使序列<MAMAMIA]=A转换为[MAMAMIA>=B。
A. 6
B. 7
C. 8
D. 9
以下操作均为辅助栈C操作
只考虑MAMAM的栈混洗序列,因为IA只有一种可能
画决策树
- push pop push pop push pop push pop push pop
- push pop push push push pop pop pop push pop
- push pop push push push pop push pop pop pop
- push push push pop push pop push pop pop pop
- push push push pop pop push push pop pop pop
- push push push pop pop pop push push pop pop
- push push push push push pop pop pop pop pop
【2019-THU-Mid】试将常规表达式“(0!+1)*2^(3!+4)+5!/6*(7-8)-9”转化为逆波兰表达式。
0 ! 1 + 2 3 ! 4 ! ^ * 5 ! 6 / 7 8 - * 9 -
【2020-THU-Mid】试将常规表达式“(0!+1)*2^(3!+4)-(5!/6+(7-(8-9)))”转化为逆波兰表达式。
散列表
【2010-THU-Fin】设散列表H[]容量M=7,采用除留余数法(H(key) = key % M)确定地址,采用单向平方探测法解决冲突,即 H1 = (H(key) + 1^2) % M,H2 = (H(key) + 2^2) % M,……,Hk = (H(key) + k^2) % M,……。现从空表开始依次插入关键码{2010, 7, 4, 0},试给出生成的散列表。
H[] 0 1 2 3 4 5 6 key 7 2010 0 4
【2012-THU-Fin】
【2014,2016-THU-Fin】相对于除余法,MAD法在(BC)方面有所改进。
A. 计算速度
B. 高阶均匀性
C. 不动点
D. 满射性
E. 以上皆非
【2014-THU-Fin】(BEF)属于针对闭散列策略的冲突排解方法。
A. mutiple slots
B. linear probing
C. overflow area
D. separate chaining
E. quadratic probing
F. double hashing
【2014,2016-THU-Fin】采用双向平方试探策略时,将散列表长度取作素数𝑀 = 4𝑘 + 3,可以极大地降低查找链前𝑀个位置冲突的概率,但仍不能杜绝。(×)
【2016,2017-THU-Fin】若元素理想随机,则用除余法作为散列函数时,即使区间长度不是素数,也不会影响数据的均匀性。(×)
【2017-THU-Fin】长为2017的哈希表,使用单向平方试探,若在某次插入时无法找到空桶而必须扩容,此时哈希表中可能的数据个数有(不考虑正在插入的元素)(CD)
A.1005
B.1008
C.1013
D.1018
【2016,2018-THU-Fin】对闭散列 [0, 𝑀), 𝑀 = 2^𝑆 , 采用如下冲突排列解决方法:
• 初始时,𝑐 = 𝑑 = 0
• 探查key冲突时,𝑐 ← 𝑐 + 1,𝑑 ← 𝑑 + 𝑐,探查 H[(key + 𝑑)%𝑀]
则这种算法是否可以保证空间能被 100% 利用?若是,请给出证明;若不是,请举出反例。
【2018-THU-Fin】采用单向平方策略的散列表,只要长度M不是素数,则每一组同义词在表中都不会超过⌊M/2⌋个。(√)
M不是素数时,完全平方数关于M的同余类数量不大于⌊M/2⌋
【2018-THU-Fin】将n个词条逐个插入一个容量为M、采用线性试探策略、初始为空的散列表,n<M,则无论它们的插入次序如何,最终的平均成功查找长度都必然一样。(√)
(平方试探有反例)
【2020-THU-Fin】

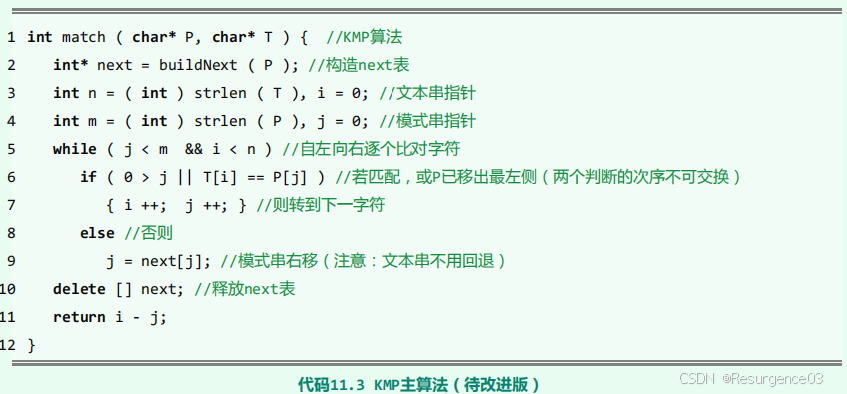
字符串匹配
【2010-THU-Mid】在对二进制串做匹配时,采用next[]表比采用BC[]表通常效率更高。(√)
【2010-THU-Mid】分别计算以下模式串的next[]表、改进的next[]表以及BC[]表。
j 0 1 2 3 4 5 6 P[] B A R B A R A next[] -1 0 0 0 1 2 3 改进的next[] -1 0 0 -1 0 0 3 BC[] B R A
j 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 P[] T A R S O M E _ T A T A R S U S next[] -1 0 0 0 0 0 0 0 0 1 2 1 2 3 4 0 改进的next[] -1 0 0 0 0 0 0 0 -1 0 2 0 0 0 4 0 BC[] O M E _ T A R U S 
【2012-THU-Fin】字符集规模越大的时候,next表比BC表效果越好。(×)
【2012-THU-Fin】在KMP匹配的过程中,当主程序运行到i, j的状态时,意味着之前至少做过i次成功匹配以及i-j次失败匹配。(×)
可能一直失败,从来没有成功过
【2013-THU-Fin】写出mamammi的改进后next表。
j 0 1 2 3 4 5 6 改进的next[] -1 0 0 0 0 3 1
【2013-THU-Fin】写出ladygaga的GS表。
j 0 1 2 3 4 5 6 7 GS[] 8 8 8 8 8 2 2 1
【2013-THU-Fin】字符集变大,各字符等概率分布,则bc表比next表好。(√)
【2014-THU-Fin】在BM算法中,对于任意模式串P,0<gs[j]≤j对每个0≤j<|P|都成立。(×)
【2016-THU-Fin】若KMP算法不使用改进版的next表,最坏情况下时间复杂度可能达到𝑂(𝑚𝑛)。(×)
【2016-THU-Fin】对小写字母集的串匹配,KMP 算法与蛮力算法在(A)情况下渐进的时间复杂度相同。
A. 最好
B. 最坏
C. 平均
D. 以上皆非
【2016-THU-Fin】对随机生成的m位二进制串,gs 表中 gs[0] = 1 的概率为()。
【2017-THU-Fin】红鲤鱼与路鲤鱼与路的拼音(HongLiYuYuLuLiYuYuLu)的gs表中有()项互异项。
(A)3
(B)5
(C)7
(D)以上都不对
【2017,2018-THU-Fin】BM 算法仅仅使用 bc 表或者 gs 表,能够在最好情况下达到 O(n/m) 。(√)
【2018-THU-Fin】相对KMP算法而言,BM算法更适合于大字符集的应用场合。(√)
【2020-THU-Fin】试分别给出如下模式串对应的next[]表和改进后的next[]表。
j 0 1 2 3 4 5 6 7 8 9 10 11 12 P[j] C B C B A C D C B F B E A next[j] improvedNext[j]
二叉树
【2010-THU-Mid】所有叶节点深度一致的有根二叉树,必为满树。()
【2010-THU-Mid】完全二叉树的子树,也一定是完全二叉树。()
【2010-THU-Mid】由合法的先序遍历序列和中序遍历序列,可以唯一确定一棵二叉树。(√)
【2010-THU-Mid】在Huffman算法过程中,权重小的内部节点必然早于权重大的内部节点被创建。()
【2010-THU-Mid】由6个节点组成的二叉树,若中序遍历序列为ABCDEF,则不可能的后序遍历序列是()
A. CBEADFB. ADFECB
C. ABDECF
D. BDACFE
E. 以上皆非
【2010-THU-Mid】由2010个节点组成的完全二叉树,共有()个叶节点。
【2010-THU-Mid】在由2010个节点组成的二叉树中,若单分支节点不超过10个,则对其做迭代式中序遍历时辅助栈的容量为()即足够。
【2010-THU-Mid】某二叉树有 A~G 共 7 个节点,其先序遍历、后序遍历序列的部分内容如下,试将其补全。
先序遍历 E C B D F 后序遍历 B A G
【2019-THU-Mid】由2019个无差别节点构成的真二叉树,与由1009对括号构成的合法表达式一样多。()
【2019-THU-Mid】在最优PFC树中交换深度不同的两棵子树,得到的必然不再是最优PFC树。()
【2019-THU-Mid】同一棵二叉树的前序、中序、后序遍历序列中,叶子节点的相对次序必然完全一致。()
【2019-THU-Mid】使用容量为1009的辅助队列,足以对任一由2019个节点构成的二叉树做层次遍历
【2019-THU-Mid】所有内部节点均满足“左子树比右子树高一层”的二叉树,称作Fibonacci树。
1) 试画出其中高度为4者,并从0开始按中序遍历次序对各节点编号;
2) 试给出该树的层次遍历序列。
【2024-912】将以x为根的子树节点个数记为x.size,如果将二叉树中满足x.size * 2 <= x.parent.size的非根节点x称作“轻节点”,那么在包含2024个节点的二叉树中,一个节点至多可能有()个轻的真祖先。
显然满二叉树每个节点都是轻节点。高度为10的满二叉树有1023个节点,高度为11的满二叉树有2047个节点。考虑对应的2024个节点的完全二叉树,那么根节点左子树的所有节点都是轻节点,左子树的叶节点有9个真祖先是轻节点。
如果某个叶节点有10个真祖先是轻节点,那么这个节点深度至少是11。
如果深度是11,其所在根节点的子树是高度为10的满二叉树,与所在根节点子树的根节点是轻节点矛盾。
其他深度同理可证
【2024-912】出现频率为{1,2,3,3}的一组字符共有()种PFC编码方案。
频率无用。4个字符需要2位0-1码,共4×3×2×1=24种方案。
搜索树
二叉搜索树
【2010-THU-Mid】由同一组互异关键码,按不同次序逐个插入而生成的 BST 必互异。()
【2010-THU-Mid】BST中新插入的节点,必是叶节点。()
【2010-THU-Mid】 由5个互异节点组成、先序遍历序列与层次遍历序列相同的BST,共有()棵。
【2014-THU-Fin】由同一组共n个词条构成的任意两棵BST,经O(logn)次zig和zag旋转之后,必可相互转换。(×)
【2016-THU-Fin】在BST中删除两个节点(7B3),则无论先删除哪个节点,最终BST的拓扑结构均相同。()
【2016-THU-Fin】在BST中查找365,以下查找序列中不可能出现的是()
A. 912,204,911,265,344,380,365
B. 89,768,456,372,326,378,365
C. 48,260,570,302,340,380,361,365
D. 726,521,201,328,384,319,365
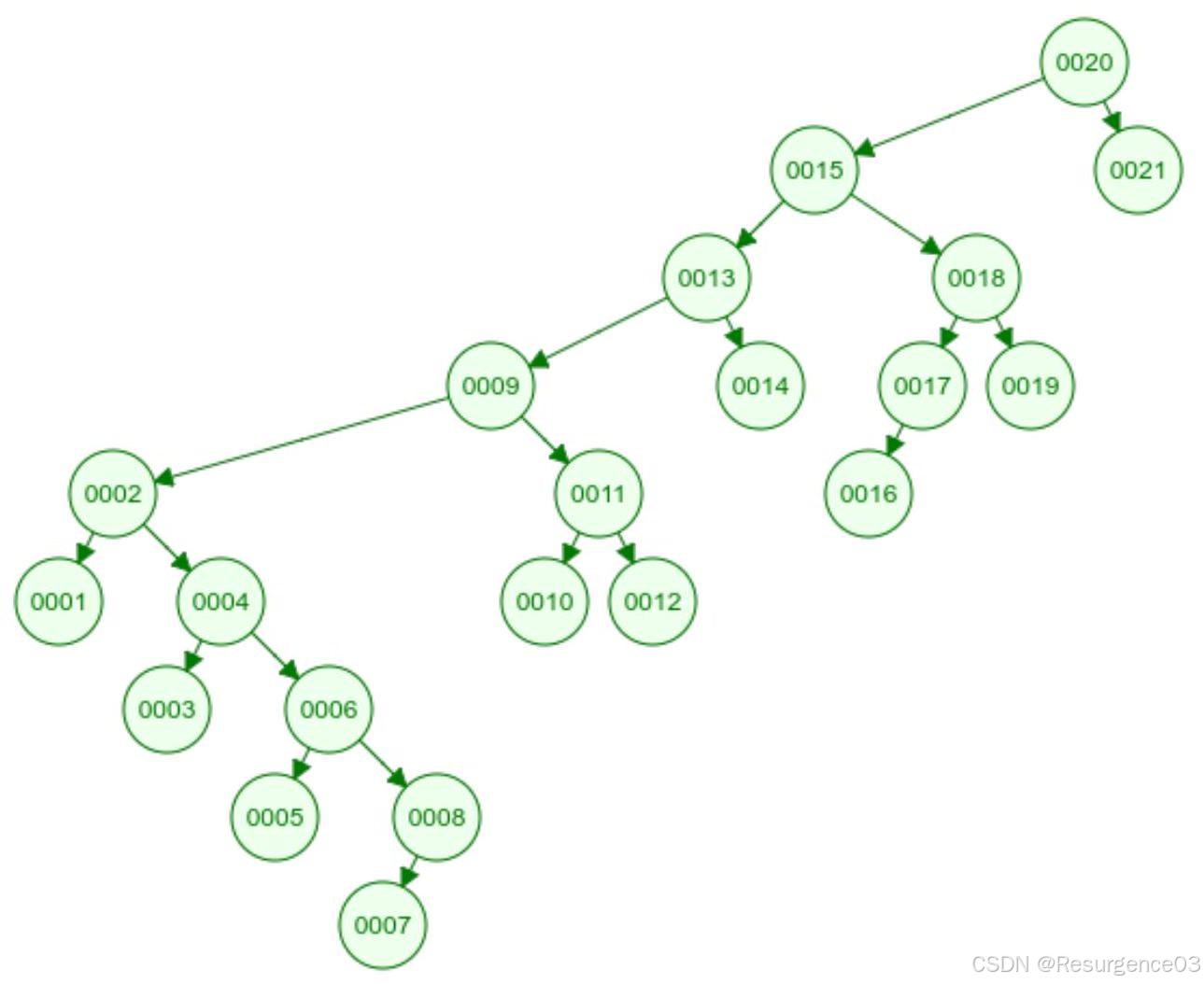
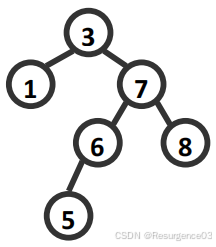
【2016-THU-Fin】在不改变 BST 和 BinNode 定义的前提下(BinNode 仅存储 parent, data, lc, rc), 设计算法, 使得从节点 𝑥 出发, 查找值为 𝑌 的节点 𝑦 的时间复杂度为 𝑜(𝑑), 𝑑 为节点 𝑥与 𝑦 的距离。要求利用树的局部性, 复杂度与总树高无关, 否则将不能按满分起评。
函数定义式: 参量为 BinNode 𝑥, 𝑦, 𝑇, 返回值为 BinNode 类型, 函数名 fingerSearch
(a) 说明算法思路
(b) 写出伪代码
(c) 在图中画出由值为 6 的点查找值为 17 的点的查找路径
(d) 说明算法时间复杂度为 𝑂(𝑑) (若无法达到, 说明困难在哪)
【2016,2017-THU-Fin】由5个互异节点构成的不同的BST共有()个。
A. 24
B. 30
C. 36
D. 42
E. 120
【2018-THU-Fin】若调用BST::remove(e)将节点x从常规BST中删除,则所需的时间为被删除之前x的深度。(×)
平衡二叉搜索树
【2013-THU-Fin】两棵key值顺序一样的BBST经过O(logn)次zig、zag就能互相转化。()
AVL树
【2010-THU-Mid】在AVL树中删除节点之后若树高降低,则必然做过旋转调整。(×)
【2010-THU-Mid】在包含 2010 个节点的 AVL 树中,最高与最低叶节点之间的深度差最大可达()。
A. 8B. 9
C. 10
D. 11
E. 以上皆非
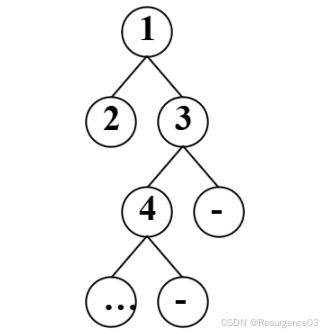
【2010-THU-Mid】右图有可能是一棵刚做过BST的()操作,但尚未旋转调整的AVL树。
A. delete(2)B. insert(3)
C. detele(4)
D. insert(5)
E. insert(8)
【2010-THU-Mid】由2010节点组成的AVL树,最大高度可达()
【2010-THU-Mid】在高度为2010的AVL树中删除一节点,至多可能造成()个节点失衡,至多需做()次旋转调整。
【2010-THU-Mid】在()中,越深的节点必然越多。
A. 二叉树B. AVL树
C. 满二叉树
D. 完全二叉树
E. 以上皆非
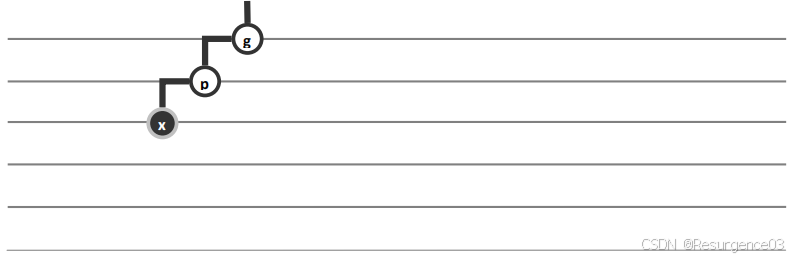
【2010-THU-Mid】节点x的父节点和祖父节点分别记作p和g。试在下图中补充尽可能少的节点以构造一棵AVL树,使得:
1) 在摘除x之后,p失衡;2) 经局部双旋调整之后,g 因失衡需再次实施双旋调整。
请同时在右侧画出最终恢复平衡的树形。
【2012-THU-Fin】将[1481,1992]区间内的整数逐一插入到空AVL树中,最后该AVL树的高度是(CD)
A. 7
B. 8
C. 9
D. 10
E. 以上都不对
共512=2^9个元素,至少为9。fib(13)-1=232,也可能是10。
【2013-THU-Fin】依次将 0, ..., 2^d−1插入到初始为空的AVL一定高度为d。()
【2014-THU-Fin】设在某新节点插入AVL树后(尚待平衡化时),最低失衡节点为g。若此时g的左、右孩子的平衡因子分别为-1和0,则应通过(C)旋转使之重新恢复平衡。
A. zig
B. zig+zag
C. zag+zig
D. zag
E. 不确定
【2016-THU-Fin】若AVL树插入元素的过程中发生了旋转操作,则树高必不变。(√)
【2016-THU-Fin】如果元素理想随机,那么对二叉搜索树做平衡化处理,对改进其渐进时间复杂度并没有什么实质的作用。(×)

【2018-THU-Fin】在某节点被删除后AVL树的高度即便下降了,这次操作期间也未必做过旋转调整。(√)
【2018-THU-Fin】对规模为n的AVL树做一次插入操作,最坏情况下可能引发\omega(logn)次局部重构。(×)
时间复杂度为O(logn),但只有不多于1次局部重构
伸展树
【2010-THU-Mid】设x为某伸展树中的最大关键码,则在find(x)过程中不可能实施()调整。
A. zig‐zigB. zig‐zag
C. zag‐zig
D. zag‐zag
E. 以上皆非
【2013-THU-Fin】将2014个数插入splay,第一次访问经过2013次旋转,则是单调插入的。()
【2014-THU-Fin】即便访问序列不满足局部性(比如完全理想的随机),伸展树依然能保证分摊O(logn)的性能。(√)
【2016-THU-Fin】在任何情况下,伸展树总能保持每次操作𝑂(log 𝑛)的平均复杂度。()
【2018-THU-Fin】只有在访问序列具有较强的局部性时,伸展树才能保证分摊O(logn)的性能。()
【2018-THU-Fin】将{0,1,...,2018}插入一棵空的伸展树后,若树高为2018,则上述词条必是按单调次序插入的。()
【2018-THU-Fin】最底层的叶节点一旦被访问(并做过splay调整)之后,伸展树的高度必然随即下降。()
红黑树
【2012-THU-Fin】对红黑树进行插入操作时,进行双红修正,黑高度增加,则()发生重染色,()发生结构调整。
A. 必然,必然
B. 必然,可能
C. 必然,必然不
D. 可能,必然
E. 可能,可能
F. 可能,必然不
【2013-THU-Fin】在初始为空的红黑树中依次插入关键码[0, N)
(1)写出N = 9的红黑树
(2)写出树高 H 和 N 的通项公式
【2016-THU-Fin】若红黑树插入一个元素后,黑高度增加,则双红修正过程中没有拓扑结构变换,只有重染色操作。()
【2018-THU-Fin】红黑树的插入或删除操作,都有可能导致\omega(logn)个节点的颜色反转。()
【2018-THU-Fin】在插入操作后若红黑树黑高度增加,则在双红修复过程中仅做过重染色,而无任何结构调整。()
B-树
【2010-THU-Mid】高度为3的5阶B‐树,至多可存放()个关键码,至少需存放()个。
【2012-THU-Fin】将[23,1481)区间内的整数组成一个2-3-B树,且根节点只有一个关键码,则最终该B树的高度至少是()
A. 7
B. 8
C. 9
D. 以上都不对
【2014-THU-Fin】Btree::solveOverflow()和 Btree::solveUnderflow()在最坏情况下均需Ω(logn)时间。然而在 B-树任一足够长的生命期内,就分摊意义而言二者都仅需O(1)时间。()
【2016-THU-Fin】将𝑁个关键码按随机次序插入B树,则期望的分裂次数为𝑂 (log^2𝑁)。()
【2016-THU-Fin】以下数据结构,在插入元素后可能导致𝑂(log 𝑛)次局部结构调整的是()
A. AVL
B. B-树
C. 红黑树
D. 伸展树
E. 以上皆非
【2016-THU-Fin】人类拥有的数字化数据数量,在2010年已达到ZB (2^70 = 10^21) 量级。若每个字节自成一个关键码,用一棵16阶B-树存放,则可能的高度为()
A. 10
B. 20
C. 40
D. 80
E. 大于80
【2017-THU-Fin】B树非叶节点的元素都有后继元素,且都在叶子节点中。()
【2012,2017-THU-Fin】对以下各种搜索树进行删除操作,哪些树可能会经过Ω(logn)次局部调整,其中n为关键码的数量。()
A. AVL
B. 伸展树
C. 红黑树
D. B-树
E. 都不会
【2017-THU-Fin】一个初始时只有一个内部节点的10阶B树,经过9900次分裂和7888次合并,节点数可能在()附近。
A. 2013
B. 2015
C. 2017
D. 2018
【2018-THU-Fin】考查包含2018个关键码的16阶B-树,约定根节点常驻内存,且在各节点内部采用顺序查找。
a) 在单次成功查找的过程中,至多可能需要读多少次磁盘?
b) 在单次成功查找的过程中,至多可能有多少个关键码需要不目标关键码做比较?
【2018-THU-Fin】B-树的任一非叶节点内,每个关键码都存在直接后继,且必然来自某个叶节点。()
【2020-THU-Fin】如何从B-树中删除一个属于内部节点而非叶节点的关键码?
kd树
【2016-THU-Fin】在 kd-search中,查找区间𝑅与任一节点的 4个孙节点(假设存在)对应区域最多有 2 个相交。()
【2014,2016-THU-Fin】以下数据结构中,空间复杂度不超过线性的有()
(A)2d-tree
(B)3d-tree
(C)2D range tree
(D)interval tree
(E)segment tree
(F)priority search tree
优先级队列
【2013-THU-Fin】多叉堆比二叉堆插入慢,删除快。(×)
【2013-THU-Fin】对于关键码为0,1,…,2014的左式堆。
1. 左子堆至少有几个节点(不包括外部节点),右子树最高多高?
2. 画出示意图。
3. 按什么顺序插入0..2014,能成为2中图的样子?
【2014-THU-Fin】对于二叉堆,尽管多叉堆的高度更低,但无论是下滤一层还是整个下滤过程,时间成本反而都会增加。(×)
【2014-THU-Fin】对于任何一棵二叉树T,其右、左子树的规模之比称为右偏率。对于(常规)高度同为h的AVL树(A),红黑树(R),左式堆(L),若分别考查其右偏率所能达到的最大值,则在h足够大之后,三者按此指标的排列次序应是(C)
A. L<R<A
B. L<A<R
C. R<A<L
D. A<R<L
E. 以上皆非
【2016-THU-Fin】与二叉堆相比,多叉堆delMax()操作时间复杂度更高。 (×)
【2016-THU-Fin】完全二叉堆删除元素在最坏情况下时间复杂度为O(logn),但平均情况下仅为O(1)。(×)
【2013,2016-THU-Fin】在使用Heapify批量建堆的过程中,改变同层节点的下滤次序对算法的正确性和时间效率都无影响。(√)
【2016-THU-Fin】二叉堆中某个节点秩为𝑘, 则其兄弟节点(假设存在)的秩为(AB)
A. 𝑘 + 1
B. 𝑘 − 1
C. 𝑘 + (−1)^𝑘
D. 𝑘 − (−1)^𝑘
E. 以上皆非
【2016-THU-Fin】有2015个节点的左式堆,左子堆最小规模为(E)(不计外部节点)
A. 10
B. 11
C. 1007
D. 1008
E. 以上皆非
【2017-THU-Fin】当输入是理想随机的时候堆的delMax的平均复杂度是O(1),尽管最坏是 O(logn)。(×)
【2016,2017-THU-Fin】对于左式堆A和B,合并后所得二叉堆的右侧链元素一定来自A和B的右侧链。(×)
【2017-THU-Fin】给了一种数据结构 DEPQ(双端优先队列),空间上是线性,能够 O(1)的时间获得序列的最大值最小值,O(logn)的时间 delMin、delMax、insert
(1)如果序列的长度超过了内存,请利用这种数据结构借鉴快速划分策略给出一种排序算法
(2)如果总序列长度是 1TB,内存是 2GB,IO 页面是 4KB,单次比较操作、内存读取的时间是 t,IO 延时是 2^17t,请估计你的算法在最好最坏的情况下的时间
(3)请给出一些改进平均性能的策略
【2018-THU-Fin】相对于同样规模的完全二叉堆,多叉堆delMax()操作的时间成本更低。(×)
【2018-THU-Fin】左式堆中每一对兄弟节点的高度尽管未必“左大右小”,但左兄弟至少不低于右兄弟的一半。(×)
【2018-THU-Fin】采用Crane算法将左式堆A与B合并为左式堆H,右侧链上的节点未必都来自A或B的右侧链。(√)
图
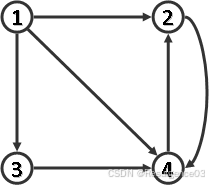
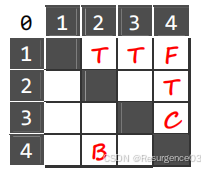
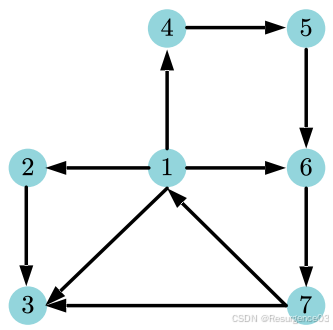
【2010-THU-Fin】某有向图的邻接矩阵如下,现从顶点1出发做DFS遍历,遇多顶点歧义时编号小者优先。试在表标出各边的分类结果(树边T,前向边F,后向边B,跨边C)
1 2 3 4 1 2 3 4
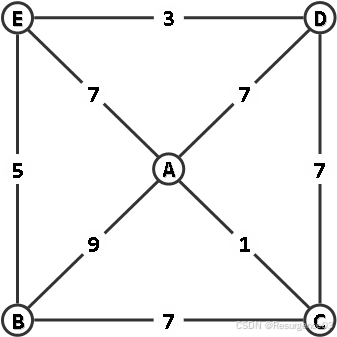
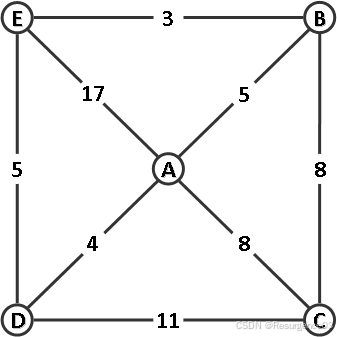
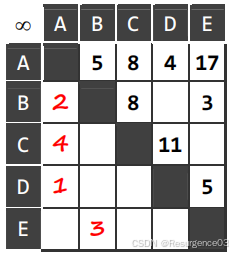
【2010-THU-Fin】某无向网络及其邻接矩阵的上三角部分如下,现从顶点 A 出发采用 Prim 算法构造最小生成树,试在下三角区域标出树边及其被选用的次序。遇多边歧义时,按边端点合成数的字典序小者优先。
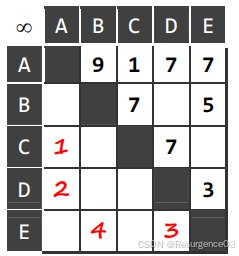
【2010-THU-Fin】某无向网络及其邻接矩阵的上三角部分如下。现从顶点 A 出发采用 Dijkstra 算法构造最短路径生成树,试在下三角区域标出树边及其被选用的次序。遇多边歧义时,按边端点合成数的字典序小者优先。
【2012-THU-Fin】对于正权值有向图,如果把所有的边权都平方之后,Dijkstra算法得到的最短路径树不变。(√)
【2012-THU-Fin】对于7节点的有向图,节点标号为1 ∼ 7,指定当存在歧义性的时候优先考虑标号小的节点。一共有多少条树边,跨边,前向边和后向边?
【2013-THU-Fin】BFS,DFS的复杂度可能不是O(N + E)。()
【2013-THU-Fin】PFS每次调用priorUpdata(),总复杂度O(n)。()
【2014-THU-Fin】我们知道,因同一顶点的邻居被枚举的次序不同,同一有向图 G 所对应的 DFS 森林未必唯一。然而只要起始于 G 中某顶点 s 的某次 DFS 所生成的是一棵树,则起始于 s 的任何一次 DFS 都将生成一棵树。()
【2014-THU-Fin】在无向连通图G中选定一个顶点 s,并将各顶点v到s的距离记作dist(v)(特别地,dist(s)=0)。于是在G.BFS(s)过程中,若辅助队列为Q,则dist(Q.front()) + 1 ≥ dist(Q.rear())始终成立。(√)
【2014-THU-Fin】有向图的DFS不仅起点任意,而且每一步迭代往往都会有多个顶点可供选择,故所生成的DFS森林并不唯一确定,且其中所含()的数量也可能不同。
A. 树边
B. 前向边
C. 后向边
D. 跨越边
E. 以上皆非
【2016-THU-Fin】如果把朋友圈视为一无向图,那么即使A君看不到你给B点的赞,你们仍可能属于同一个双联通分量。(√)
【2014,2016-THU-Fin】在有向图G中,存在一条自顶点v通向u的路径,且在某次DFS中有dTime[v]<dTime[u],则在这次DFS所生成的DFS森林中,v必是u的祖先。(×)
【2017-THU-Fin】用堆实现 PFS 时元素的深度只会减少不会增加。()
【2017-THU-Fin】PFS 时调用 priorityUpdater 至多 O(e)次。()
【2018-THU-Fin】在图DFS()算法中的default分支,将dTime(v) < dTime(u)改为dTime(v) < fTime(u)同样可行。()
【2013,2018-THU-Fin】有向图经DFS后若共有k条边被标记为BACKWARD,则它应恰有k个环路。(×)
【2018-THU-Fin】对于同一无向图,起始于顶点s的DFS尽管可能得到结构不同的DFS树,但s在树中的度数必然固定。()
【2016,2018-THU-Fin】在图的优先级搜索过程中,每次可能调用多次prioUpdater,但累计调用次数仍为O(e)。()
【2018-THU-Fin】若用完全二叉堆来实现PFS,则各顶点在出堆之前,深度只可能逐步减少(或保持)而不致增加。()
排序
【2010-THU-Mid】只要是采用基于比较的排序算法,对任何输入序列都至少需要运行O(nlogn)时间。(√)
【2010-THU-Mid】若借助二分查找确定每个元素的插入位置,向量的插入排序只需O(nlogn)时间。()
【2010-THU-Mid】考查如下问题:任给12个互异的整数,且其中10个已组织为一个有序序列,现需要插入剩余的两个以完成整体排序。若采用基于比较的算法(CBA),最坏情况下至少需做几次比较?为什么?
【2010-THU-Mid】向量的插入排序由n次迭代完成,逐次插入各元素。为插入第k个元素,最坏情况需做k次移动,最好时则无需移动。从期望的角度来看,无需移动操作的迭代平均有多少次?为什么?假定各元素是等概率独立均匀分布的。
【2010-THU-Fin】对整型向量[16,2011,6]做就地堆排序,试给出堆初始化(Robert Floyds 算法)以及各次迭代之后向量的内容。
Rank 0 1 2 Vector 16 2011 6 Heap 2011 16 6 1 16 6 2011 2 6 16 2011 3 6 16 2011 加粗为Sorted部分
【2013-THU-Fin】shell排序若将(底层的排序从)插入排序改成归并排序,效率会变快。()
【2013-THU-Fin】radix 排序将桶排序改成quick排序,仍然正确。(×)
【2013-THU-Fin】因为取(步长序列为)1,2,4,8, … , 2^𝑛会产生最坏情况
1、(步长序列变成)1,3,7, … , 2^𝑛 − 1会如何?
2、(步长序列变成)1,5,9,17, … , 2^𝑛 + 1会如何?
【2014-THU-Mid】 不存在CBA式算法,能够经过少于2n-3次比较操作,即从n个整数中找出最大和次大者。()
【2014-THU-Mid】存在CBA式算法,能够在O(n)时间内从n个无序整数中找出最大的10%。
【2014-THU-Fin】无论 g 和 h 互素与否,已知 h-有序的序列再经过 g-排序之后,必然继续保持 h-有序。()
【2014-THU-Mid】 起泡排序的每一趟扫描交换中若有元素发生交换,则相邻的逆序对必然减少。()
【2016-THU-Fin】既然可以在𝑂(𝑛)时间内找出𝑛个数的中位数,快速排序算法(12-A1)即可优化至𝑂(𝑛log 𝑛)。()
【2016-THU-Fin】若序列中逆序对个数为𝑂(𝑛2),则使用快速排序(12-A1)须进行的交换次数为𝑂(𝑛log 𝑛)。()
【2016-THU-Fin】与胜者树相比,败者树在重赛过程中,需反复将节点与其兄弟进行比较。(×)
【2017-THU-Fin】底层排序的稳定性保证了radixsort的正确性和稳定性。(√)
【2017-THU-Fin】当待排序列的长度超过内存的时候,()序列的shell排序速度最慢。
A. Shell
B. PS
C. Pratt
D. Sedgewick
【2017-THU-Fin】ℋshell = {1,2,4,8,16,32,64, … , 2^𝑘, … },设以下两种步长序列分别为ℋshell-改进 1 ={1,3,5,9,17, … , 2^𝑘 + 1, … }和ℋshell-改进 2 = {1,3,7,15,31, … , 2^𝑘 − 1,… },哪种能必然避免O(n²)的最坏情况。()
A. 只有ℋshell-改进 1能避免
B. 只有ℋshell-改进 2能避免
C. ℋshell-改进 1和ℋshell-改进 2都能避免
D. ℋshell-改进 1和ℋshell-改进 2都不能避免
【2018-THU-Fin】若输入序列包含\omega(n^2)个逆序对,则快速排序算法( LUG版)至少需要执行O(nlogn)元素交换操作。()
【2018-THU-Fin】经快速划分(LGU版)之后,后缀中的雷同元素可能调换相对次序,但其余部分的雷同元素绝不会。()
【2018-THU-Fin】只要底层的排序算法是正确且稳定的,则RadixSort也必然是正确且稳定的。(√)
【2018-THU-Fin】采用任何一种增量序列, Shell排序最后的1-sorting都只需要O(n)时间。()
【2018-THU-Fin】Shell排序每按照某个增量做过逐列排序,序列中逆序对的总数都会减少(或持平),但绝不致增加。()
【2018-THU-Fin】胜者树的根节点即是冠军,而败者树的根节点即是亚军。(√)
【2019-THU-Mid】 插入排序算法的(B)特点,是选择排序算法所不具备的。
A. 输入敏感性B. 支持在线计算
C. 就地性
D. 最好情况下复杂度更低
选择问题
【2012-THU-Fin】一个向量若存在众数,则该数必然是中位数以及频繁数。(√)
【2012-THU-Fin】如果使用了线性复杂度的中位数选取算法,快速排序的复杂度可以保证在最坏情况下也渐进等于O(nlogn)。(√)
【2013-THU-Fin】在1983个数字中取前三大,最少比较多少次?
【2014-THU-Fin】为从 2014 个随机元素中挑选出最大的 5 个,( )在最坏情况下所需的比较操作次数最少。
A. 构建大顶的锦标赛树,再做5次 delMax()
B. 用 Floyd 算法构建大顶堆,再做5次 delMax()
C. 采用选择排序算法,但仅执行前5次迭代
D. 采用起泡排序算法,但仅执行前5次迭代
E. 用 LinearSelect()算法找出第5大的元素,再遍历一趟找出至多4个大于它的元素