✨✨ 欢迎大家来访Srlua的博文(づ ̄3 ̄)づ╭❤~✨✨🌟🌟 欢迎各位亲爱的读者,感谢你们抽出宝贵的时间来阅读我的文章。
我是Srlua小谢,在这里我会分享我的知识和经验。🎥
希望在这里,我们能一起探索IT世界的奥妙,提升我们的技能。🔮
记得先点赞👍后阅读哦~ 👏👏
📘📚 所属专栏:传知代码论文复现
欢迎访问我的主页:Srlua小谢 获取更多信息和资源。✨✨🌙🌙

目录
本文所有资源均可在该地址处获取。
论文概述
Topping, Jake, et al. “Understanding over-squashing and bottlenecks on graphs via curvature.” arXiv preprint arXiv:2111.14522 (2021).
大多数图神经网络(Graph Neural Networks, GNN)使用消息传递范式,其中节点特征在输入图上传播。最近的研究表明,来自远距离结点的信息流失真,是限制依赖远程交互的任务的消息传递效率的重要因素。该限制被称为“过度挤压”(Over-squashing)。过度挤压的原因在于,图中每个结点的k跳邻居的数量随着k的增长而指数级增长,远距离结点的信息难以压缩到固定大小的结点特征中,从而导致信息丢失。本文提供了对GNN中过度挤压现象的精确描述,并分析了它是如何从图中的瓶颈产生的。为此,本文引入了一种新的基于边的组合曲率,并证明了负曲率边是导致过度挤压问题的原因。本文还提出了一种基于曲率的图重现布线方法,以缓解过度挤压问题。
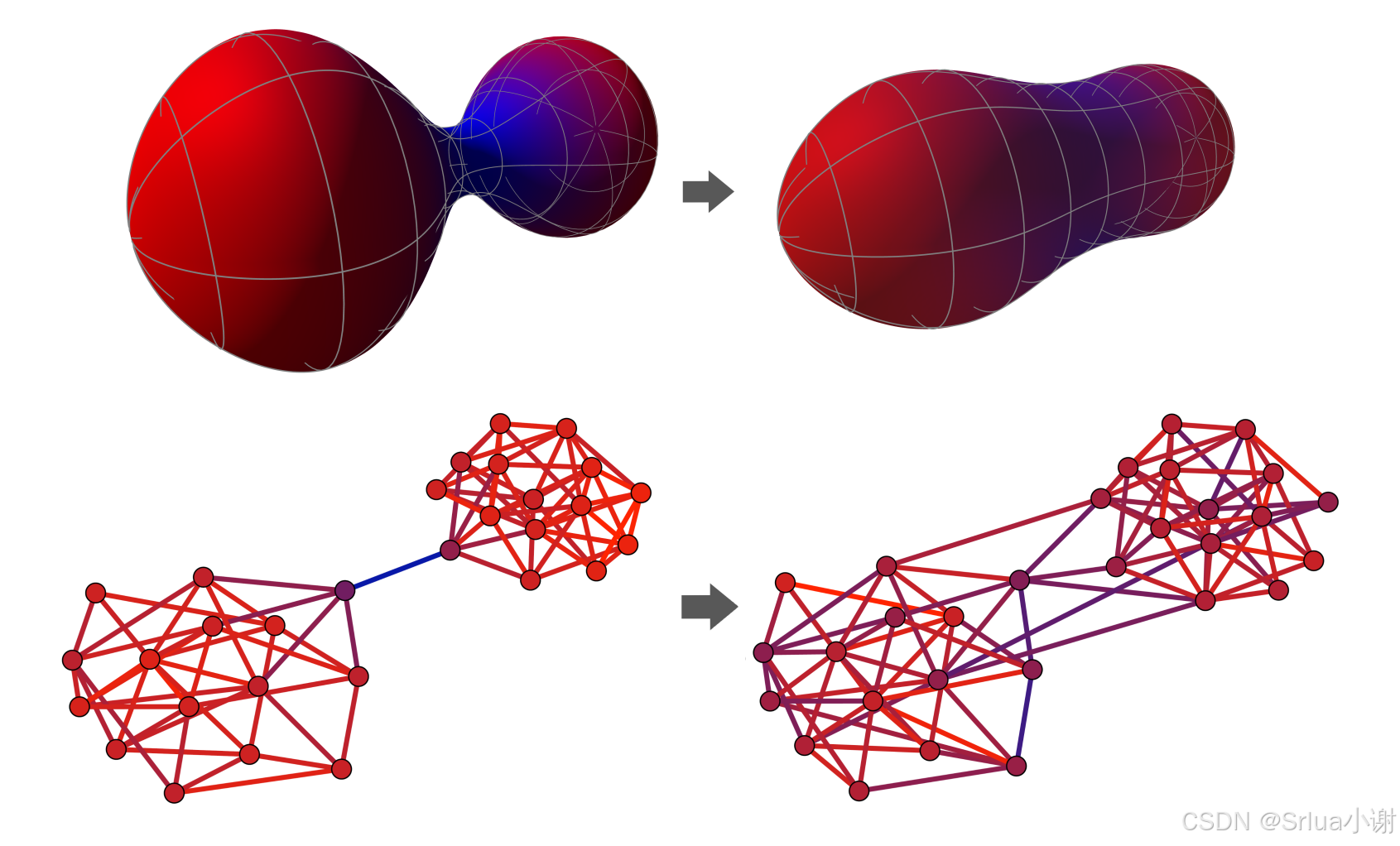
上图:曲面上曲率的演变可能会减少瓶颈。下图:本文展示了如何在图上做同样的事情来提高GNN的性能。蓝色代表负曲率;红色代表正曲率。
核心算法
算法说明
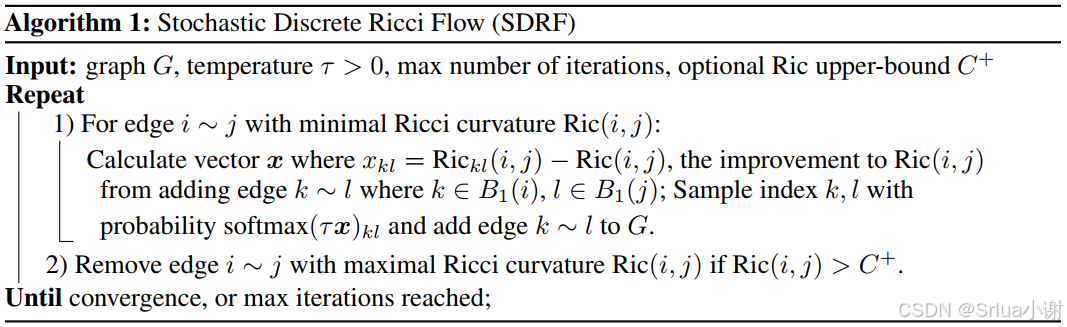
- 黎曼几何中的一个自然对象是里奇曲率(Ricci curvature),这是一种决定测地线色散的双线性形式,即从“相同”速度的附近点开始的测地线是否保持平行(欧几里得空间)、收敛(球面空间)或发散(双曲空间)。
- 算法在每次迭代中都会添加一条边来支持图中最负曲率的边,然后移除最正曲率的边。
- 要求k∈B1(i),l∈B1(j)k∈B1(i),l∈B1(j)是为了确保我们在最负曲率的边i∼ji∼j周围添加额外的3-cycle或4-cycle。这是一个局部修改。
- 原始输入图和重新布线图之间的图编辑距离以
max number of iterations的2倍为界。 temperatureτ>0τ>0决定了添加边的随机程度,τ=∞τ=∞表示总是添加最佳边。- 移除曲率最大的边是为了平衡曲率和结点的度的分布。
- 使用Balanced Forman curvature计算Ric(i,j)Ric(i,j)
optimal Ric upper-boundC+C+用于防止算法使得曲率分布负偏斜。C+=∞C+=∞表示不移除任何边。
关键代码
def sdrf(data, max_iterations=10, remove_edges=True, remove_bound=0.5, tau=1.0, undirected=True):
# 1. 将torch_geometric.data.Data实例转化为networkx.DiGraph实例,方便后续加边、减边操作
G = to_networkx(data)
if undirected:
G = G.to_undirected()
# 2. 获取图信息(邻接矩阵,边的个数)
edge_index = data.edge_index
if undirected:
edge_index = to_undirected(edge_index)
A = to_dense_adj(remove_self_loops(edge_index)[0])[0] # 邻接矩阵
A = A.cuda()
N = A.shape[0] # 边的个数
C = torch.zeros(N, N).cuda() # 初始化Ricci曲率矩阵,即Ric(i, j)
# 3. 进入图的加边、减边循环过程,其中max_iterations为最大迭代次数
for x in range(max_iterations):
can_add = True
# 3.1 根据BFC算法更新Ricci曲率矩阵
balanced_forman_curvature(A, C=C)
ix_min = C.argmin().item()
x = ix_min // N
y = ix_min % N
# 3.2 计算可加边的候选集candidates
if undirected:
x_neighbors = list(G.neighbors(x)) + [x]
y_neighbors = list(G.neighbors(y)) + [y]
else:
x_neighbors = list(G.successors(x)) + [x]
y_neighbors = list(G.predecessors(y)) + [y]
candidates = []
for i in x_neighbors:
for j in y_neighbors:
if (i != j) and (not G.has_edge(i, j)):
candidates.append((i, j))
# 3.3 根据边添加之后对Ricci曲率的提升程度,从候选集中选择边k~l进行添加
if len(candidates):
D = balanced_forman_post_delta(A, x, y, x_neighbors, y_neighbors)
improvements = []
for i, j in candidates:
improvements.append((D - C[x, y])[x_neighbors.index(i), y_neighbors.index(j)].item())
k, l = candidates[np.random.choice(range(len(candidates)), p=softmax(np.array(improvements), tau=tau))]
G.add_edge(k, l) # 添加边
if undirected:
A[k, l] = A[l, k] = 1
else:
A[k, l] = 1
else:
can_add = False
if not remove_edges:
break
# 3.4 移除具有最大Ricci曲率的边,其中remove_bound为曲率最大上界
if remove_edges:
ix_max = C.argmax().item()
x = ix_max // N
y = ix_max % N
if C[x, y] > remove_bound:
G.remove_edge(x, y) # 移除边
if undirected:
A[x, y] = A[y, x] = 0
else:
A[x, y] = 0
else:
if can_add is False:
break
# 4. 将networkx.DiGraph实例转化为torch_geometric.data.Data实例,返回
return from_networkx(G)
运行方法
数据集
支持Cora, Citeseer, Pubmed, Cornell, Texas, Wisconsin
脚本自动下载。如不能请参考geom-gcn。
配置文件
不同数据集的配置文件位于./configs/。运行之前需要修改数据集根目录和输出目录:
output_dir: $OUTPUT_DIR$
data:
root: $DATA_ROOT$
训练和测试
# train on train data splits
python train.py --config-file configs/*.yaml
# test on val and test data splits
python eval.py --config-file configs/*.yaml
或
search_dir=configs
for file in "$search_dir"/*
do
python train.py --config-file $file
python eval.py --config-file $file
done
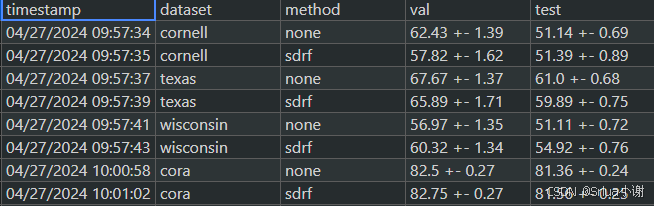
运行结果
运行日志、模型权重、重新布线结果保存在$OUTPUT_DIR/$DATASET_NAME/
测试结果(accuracy)保存在./result.csv