DHT11温湿度传感器
DHT11数据进行传输的格式是怎样的?
DHT11数据进行传输的原理是怎样的?
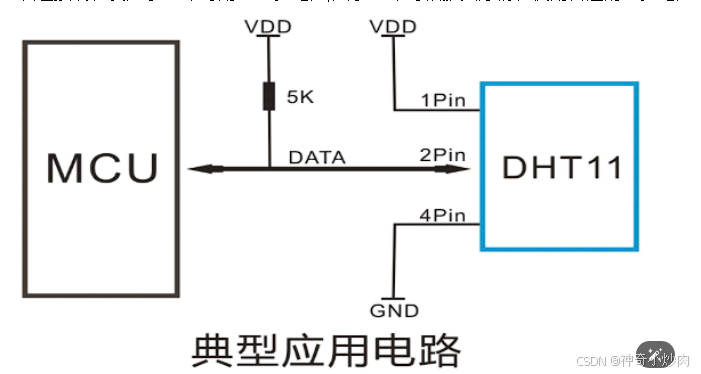
DHT算是一种典型的温湿度传感模块,既能传递温度又能进行湿度的测量,DHT的接线方法通常如下:
2.数据传输的方法&通讯过程:
DHT11的数据传输方向为单向的,外设 ==> MCU,通过数据引脚串行方式一次性完整的数据传输为40bit(40位,5字节),高位先输出,其中 8bit湿度整数数据+8bit湿度小数数据+8bit温度整数数据+8bit温度小数数据。最后再输出所有数据的总和
通讯过程:
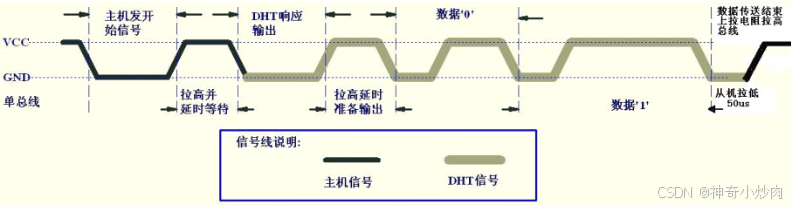
首先主机总线[^22]空闲状态时,VCC呈现高电平,然后主机端将其拉低并持续18ms以上,以进行DHT11起始信号的检测。然后DHT11发出起始信号并拉高电平进行等待。此时开始信号完成,需将DATA对应的IO口切换为输入模式,随后总线为由DHT11发出的80us低电平的响应信号,然后DHT在此吧总线拉高80us准备发送数据,数据以1bit位的方式进行传输,不同的数据传输高电平的延时不一致。
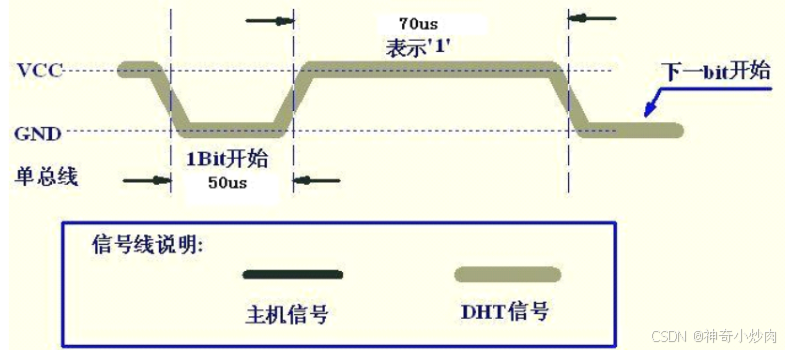
下图较为重要,程序常用到:

传输开始后,数据0的表示方法:

传输开始后,数据1的表示方法:
在最后一位传输结束后,总线先由DHT11拉低50us,随后由相关上拉电阻拉高后进入空闲状态(参考第一张图)。此外需要注意的是图中的总线由两种颜色进行标注,当线色为黑色时,此时由主机端MCU控制总线的高低电平,进行一系列数据读取的“预处理”操作,而线色变为灰色时则该总线控制权交由到外设DHT上,主机端只管根据电平占位时间,判断进行数据的接受即可。而我们编程能操作的也只有主机端(MCU)。
3. 代码实现
需要注意的是温湿度传感器可直接进行温湿度感知传感,并不需要进行ADC转换。
引脚配置与驱动相关
需要注意的是DHT11对时序比较敏感,时序配置不当会导致数据出现逻辑错误
#include "DHT11.h"
#include "tim.h"
/*配置为普通推挽模式输出,用于拉高电平*/
void DHT11_PP_OUT(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//GPIO_InitStructure.Mode = GPIO_MODE_AF_PP;
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStructure.Pin = DHT11_PIN;
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStructure.Pull = GPIO_NOPULL;
HAL_GPIO_Init(DHT11_PORT, &GPIO_InitStructure);
}
/*配置为输入模式,用于接收数据相关*/
void DHT11_UP_IN(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.Mode = GPIO_MODE_INPUT;
GPIO_InitStructure.Pin = DHT11_PIN;
GPIO_InitStructure.Pull = GPIO_PULLUP;
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(DHT11_PORT, &GPIO_InitStructure);
}
/*
@brief: 读取一个字节
*/
uint8_t DHT11_ReadByte()
{
uint8_t resData = 0;
//先高位再低位进行传输
for (int i = 0; i < 8; i++)
{
/* 等待低电平结束 */
while(DHT11_ReadPin == 0);
//高电平延时40us 因为数据为0时持续26-28us,超过为1
my_delay_us(40);
//数据为1
if (DHT11_ReadPin == 1)
{
/* code */
//等待高电平结束
while(DHT11_ReadPin == 1);
resData |= (uint8_t)(0x01 << (7 - i));
}
//数据为0
else
{
resData &= ~(uint8_t)(0x01 << (7 - i));
}
}
return resData;
}
/*
@brief: 读取温湿度
*/
uint8_t DHT11_ReadData(DHT11_Data_Typedef *DHT11_Data)
{
//printf("开始读取数据!");
//1.主机输出拉低电平
DHT11_PP_OUT();
DHT11_PULL_LOW;
//持续18ms以上
//my_delay_us(20);
my_delay_ms(20);
//2.主机拉高,持续20-40us
DHT11_PULL_HIGH;
my_delay_us(30);
//3.从机对总线进行接入,主机获取电平数据处理
DHT11_UP_IN();
//收到从机的响应信号
if (DHT11_ReadPin == 0)
{
/*等待低,高电平应答信号结束*/
while(DHT11_ReadPin == 0);
while(DHT11_ReadPin == 1);
//4.正式接受数据处理
DHT11_Data -> humi_int = DHT11_ReadByte();
DHT11_Data->humi_dec = DHT11_ReadByte();
DHT11_Data->temp_int = DHT11_ReadByte();
DHT11_Data->temp_dec = DHT11_ReadByte();
DHT11_Data->chek_sum = DHT11_ReadByte();
//5.读取结束,主机拉高
DHT11_PP_OUT();
DHT11_PULL_HIGH;
printf("Check: %d\r\n",DHT11_Data->chek_sum);
//6.数据校验并进行回传
if (DHT11_Data->chek_sum == DHT11_Data -> humi_int + DHT11_Data->humi_dec + DHT11_Data->temp_int + DHT11_Data->temp_dec)
{
return 1;
}
}
return 0;
}
时钟定时器相关
#include "tim.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim2;
/* TIM2 init function */
void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_SlaveConfigTypeDef sSlaveConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 71;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 65535;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_DISABLE;
sSlaveConfig.InputTrigger = TIM_TS_ITR0;
if (HAL_TIM_SlaveConfigSynchro(&htim2, &sSlaveConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspInit 0 */
/* USER CODE END TIM2_MspInit 0 */
/* TIM2 clock enable */
__HAL_RCC_TIM2_CLK_ENABLE();
/* USER CODE BEGIN TIM2_MspInit 1 */
/* USER CODE END TIM2_MspInit 1 */
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspDeInit 0 */
/* USER CODE END TIM2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM2_CLK_DISABLE();
/* USER CODE BEGIN TIM2_MspDeInit 1 */
/* USER CODE END TIM2_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
void my_delay_us(uint16_t us)
{
__HAL_TIM_SET_COUNTER(&htim2, 0);
HAL_TIM_Base_Start(&htim2);
while(__HAL_TIM_GET_COUNTER(&htim2) < us);
HAL_TIM_Base_Stop(&htim2);
}
void my_delay_ms(uint16_t ms)
{
//my_delay_us(ms * 1000);
//while(ms * my_delay_us(1000));
for (int i = 0; i < ms; i++)
{
/* code */
my_delay_us(1000);
}
}
/* USER CODE END 1 */
main函数
#include "main.h"
#include "i2c.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
#include "OLED.h"
#include "DHT11.h"
DHT11_Data_Typedef DHT11_Data;
void SystemClock_Config(void);
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_USART1_UART_Init();
OLED_Init();
/* USER CODE BEGIN 2 */
//printf("success2!");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
my_delay_ms(1000);
if (DHT11_ReadData(&DHT11_Data))
{
//温度显示
OLED_ShowString(1,1, "Temp:");
OLED_ShowNum(1,6, DHT11_Data.temp_int, 2);
OLED_ShowChar(1,8 ,'.');
OLED_ShowNum(1,9, DHT11_Data.temp_dec, 2);
//湿度显示
OLED_ShowString(2,1, "Humi:");
OLED_ShowNum(2,6, DHT11_Data.humi_int, 2);
OLED_ShowChar(2,8 ,'.');
OLED_ShowNum(2,9, DHT11_Data.humi_dec, 2);
}
else
{
//OLED_ShowString(1,1, "ERROR!");
printf("ERROR");
}
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */