一、思路
深度相机会发布一个将深度图像与彩色图像对齐的topic:/camera/aligned_depth_to_color/image_raw(深度流向彩色流对齐),利用该topic可以获取对应的三维坐标,该坐标还需要经过深度相机的内参矩阵变换。
二、变换原理
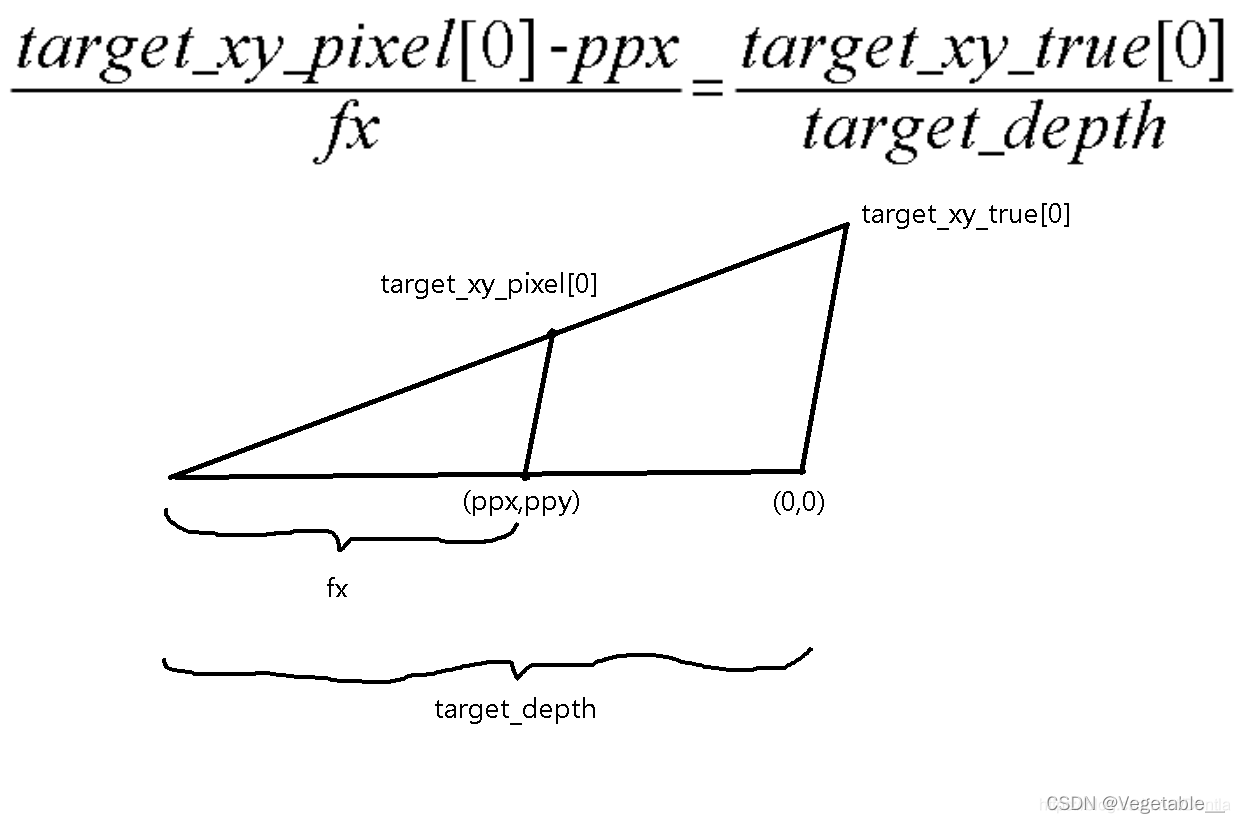
三、程度实现
3.1 准备工作
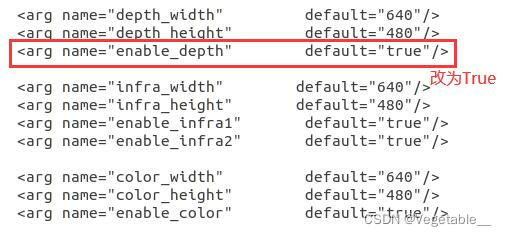
1、设置 realsense-ros 的rs_camera.launch文件
说一个这里我自己遇到的坑,realsense默认的分辨率应该是1280×720,我将彩色图像的分辨率改为了640×480,在使用深度图像时没有更改深度图像的分辨率,导致订阅不到这个topic/camera/aligned_depth_to_color/image_raw,所以一定要将彩色图像和深度图像设置相同的分辨率
3.2获取相机的内参矩阵
import pyrealsense2 as rs
import numpy as np
import cv2
import json
pipeline = rs.pipeline() # 定义流程pipeline
config = rs.