http://blog.csdn.net/lights_joy/
欢迎转载,但请保留作者信息
BRISK是BRIEF描述子的一种改进,相比于BRIEF特征,它具有旋转不变性、尺度不变性和对噪声的鲁棒性。本节尝试在Python下使用此特征检测方式,使用的测试图像为先前已经转换为灰度图的棉花图像:

首先读取图像:
-
- img = cv2.imread(r'F:\projects\src\opencv\images\cotton\39.gray.jpg')
- plt.imshow(img)
接着创建一个brisk特征检测器:
-
- brisk = cv2.BRISK_create()
接下来计算图像的特征,此函数的原型为:
- Help on built-in function detectAndCompute:
-
- detectAndCompute(...)
- detectAndCompute(image, mask[, descriptors[, useProvidedKeypoints]]) -> keypoints, descriptors
调用它计算特征点并显示:
-
- (kpt, desc) = brisk.detectAndCompute(img, None)
- bk_img = img.copy()
- out_img = img.copy()
- out_img = cv2.drawKeypoints(bk_img, kpt, out_img)
- plt.figure(2)
- plt.imshow(out_img)
结果就是这样的:
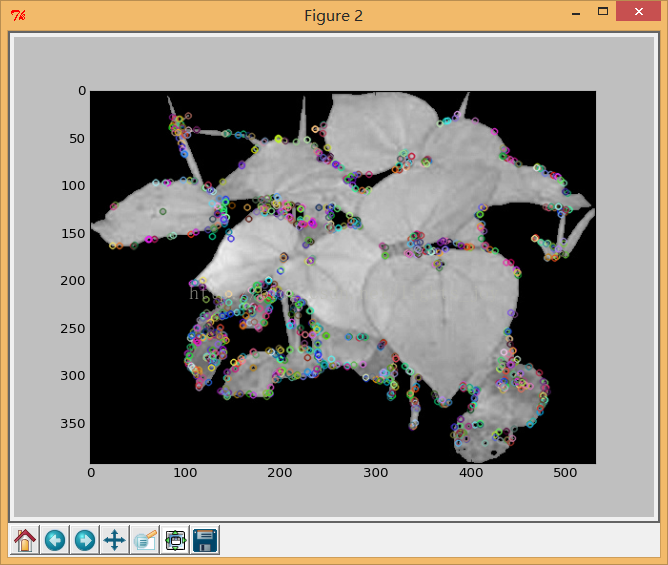
貌似对我们的叶片识别没有直接的帮助,需要自己寻找特征点才行。
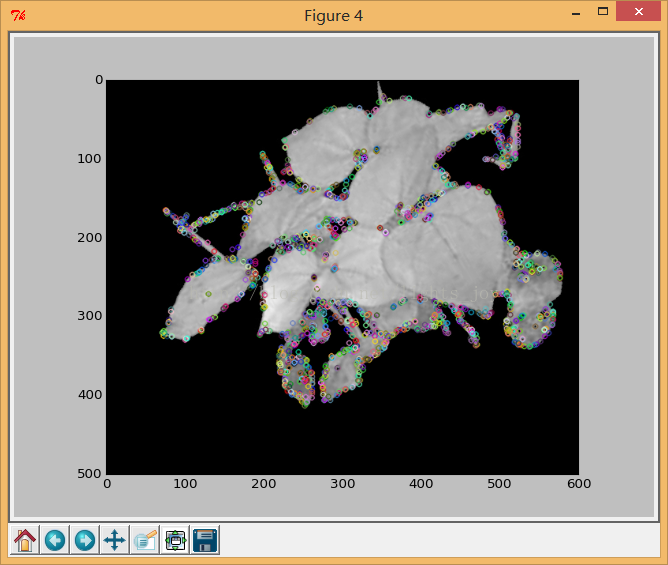
直接将原图旋转30度:
-
- ang=np.pi/6
- rot_mat = np.array([[np.cos(ang), np.sin(ang), 0], [-np.sin(ang), np.cos(ang), 200]])
- img_30 = cv2.warpAffine(img, rot_mat, (600,500))
- plt.figure(3)
- plt.imshow(img_30)
计算新的特征值:
-
- (kpt_30, desc_30) = brisk.detectAndCompute(img_30, None)
- bk_img = img_30.copy()
- out_img = img_30.copy()
- out_img = cv2.drawKeypoints(bk_img, kpt_30, out_img)
- plt.figure(4)
- plt.imshow(out_img)
直接做特征点的匹配:
-
- matcher = cv2.BFMatcher()
- matches = matcher.match(desc, desc_30)
- print(matches)
最后用图像显示匹配的结果:
-
- matches.sort(None, None, True)
- out_img = cv2.drawMatches(img, kpt, img_30, kpt_30, matches[0:5], out_img)
- plt.figure(5)
- plt.imshow(out_img)
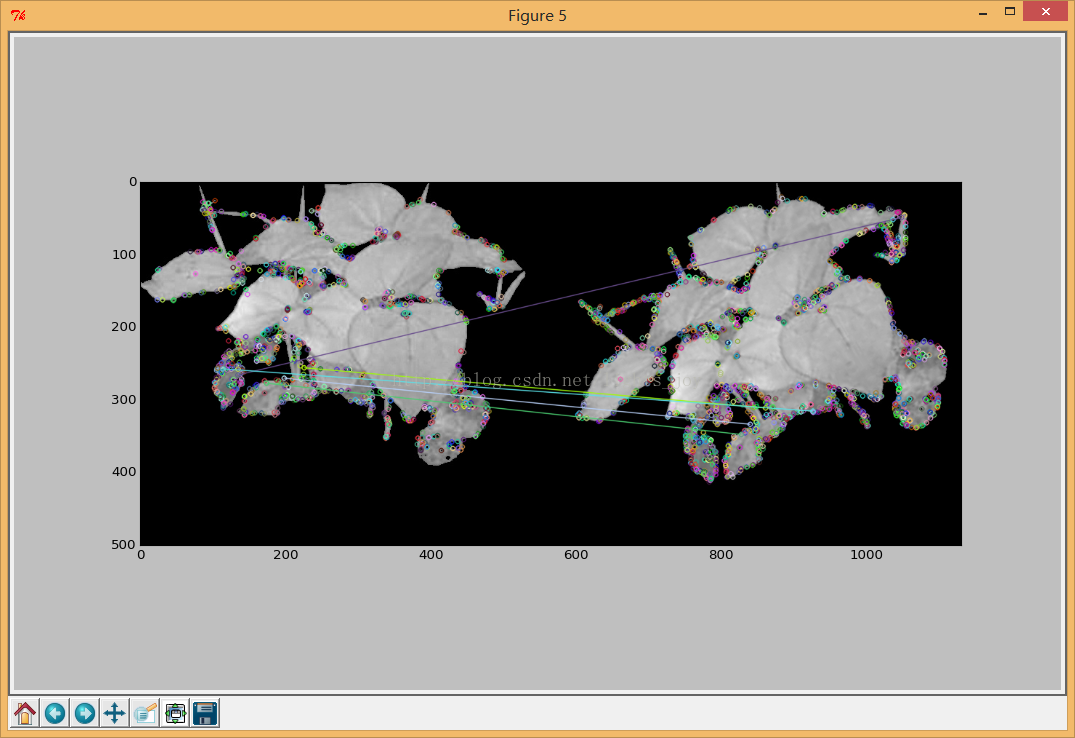
匹配的效果也令人失望。