前置依赖
先看下亚博官网的介绍
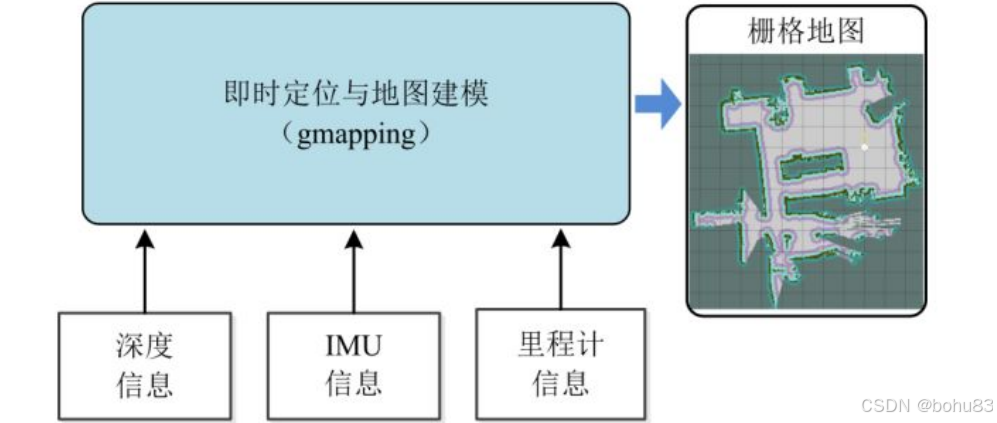
Gmapping简介
gmapping只适用于单帧二维激光点数小于1440的点,如果单帧激光点数大于1440,那么就会出【[mapping-4] process has died】 这样的问题。
Gmapping是基于滤波SLAM框架的常用开源SLAM算法。
Gmapping基于RBpf粒子滤波算法,即时定位和建图过程分离,先进行定位再进行建图。
Gmapping在RBpf算法上做了两个主要的改进:改进提议分布和选择性重采样。
优点:Gmapping可以实时构建室内地图,在构建小场景地图所需的计算量较小且精度较高。
缺点:随着场景增大所需的粒子增加,因为每个粒子都携带一幅地图,因此在构建大地图时所需内存和计算量都会增加。因此不适合构建大场景地图。并且没有回环检测,因此在回环闭合时可能会造成地图错位,虽然增加粒子数目可以使地图闭合但是以增加计算量和内存为代价。
底层转换
ros2 launch yahboomcar_bringup yahboomcar_bringup_launch.py #底层数据程序
参见:https://blog.csdn.net/bohu83/article/details/145394204
ros2 launch yahboomcar_nav map_gmapping_launch.py #建图节点
from launch import LaunchDescription
from launch_ros.actions import Node
import os
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
slam_gmapping_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('slam_gmapping'), 'launch'),
'/slam_gmapping.launch.py'])
)
base_link_to_laser_tf_node = Node(
package='tf2_ros',
executable='static_transform_publisher',
name='base_link_to_base_laser',
arguments=['-0.0046412', '0' , '0.094079','0','0','0','base_link','laser_frame']
)
return LaunchDescription([slam_gmapping_launch,base_link_to_laser_tf_node])
这里启动了一个launch文件-slam_gmapping_launch和一个发布静态变换的节点-base_link_to_laser_tf_node。
从代码上看,依赖了slam_gmapping.
slam_gammping
可以从网上找个资料大概了解下,也可以看官网文档:gmapping - ROS Wiki
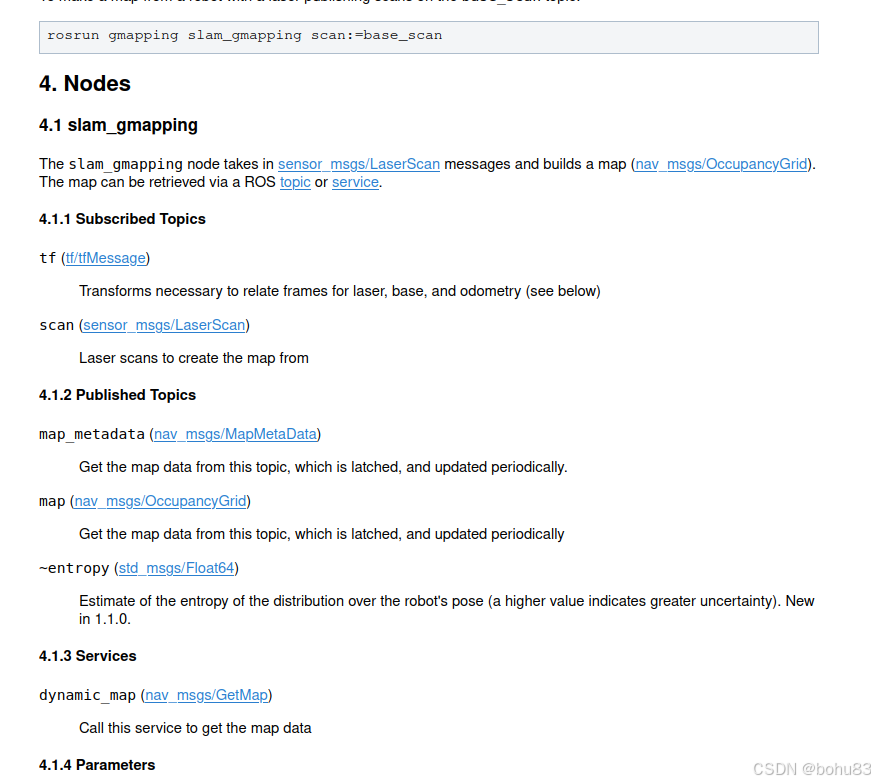
从文档大概看就是订阅话题:/scan 激光雷达数据、tf 坐标变换;发布了话题:map_metadata、map\~entropy 服务:dynamic_map 获取地图数据
launch还是要引用代码,所以apt-install 办法不适合,需要找源码编译安装。
https://github.com/ros-perception/slam_gmapping
找了这个地址,试了下编译安装。
CMake Error at CMakeLists.txt:5 (find_package):
By not providing "Findcatkin.cmake" in CMAKE_MODULE_PATH this project has
asked CMake to find a package configuration file provided by "catkin", but
CMake did not find one.
Could not find a package configuration file provided by "catkin" with any
of the following names:
catkinConfig.cmake
catkin-config.cmake
Add the installation prefix of "catkin" to CMAKE_PREFIX_PATH or set
"catkin_DIR" to a directory containing one of the above files. If "catkin"
provides a separate development package or SDK, be sure it has been
installed.我的测试环境是ubuntu 22+ ros2 humble.系统缺少 catkin 这个包.
因为在ros2 中catkin 已经被ament取代,如何用ros2 中colcon build 编译 ros中 catkin的功能包?
需要修改源码和cmakelists把catkin相关的更换成ament,我看了下比较麻烦,直接使用了亚博官方的代码。工程结构如下所示,就是指定了启动脚本:src/slam_gmapping/launch/slam_gmapping.launch.py跟slam_gmapping.yaml
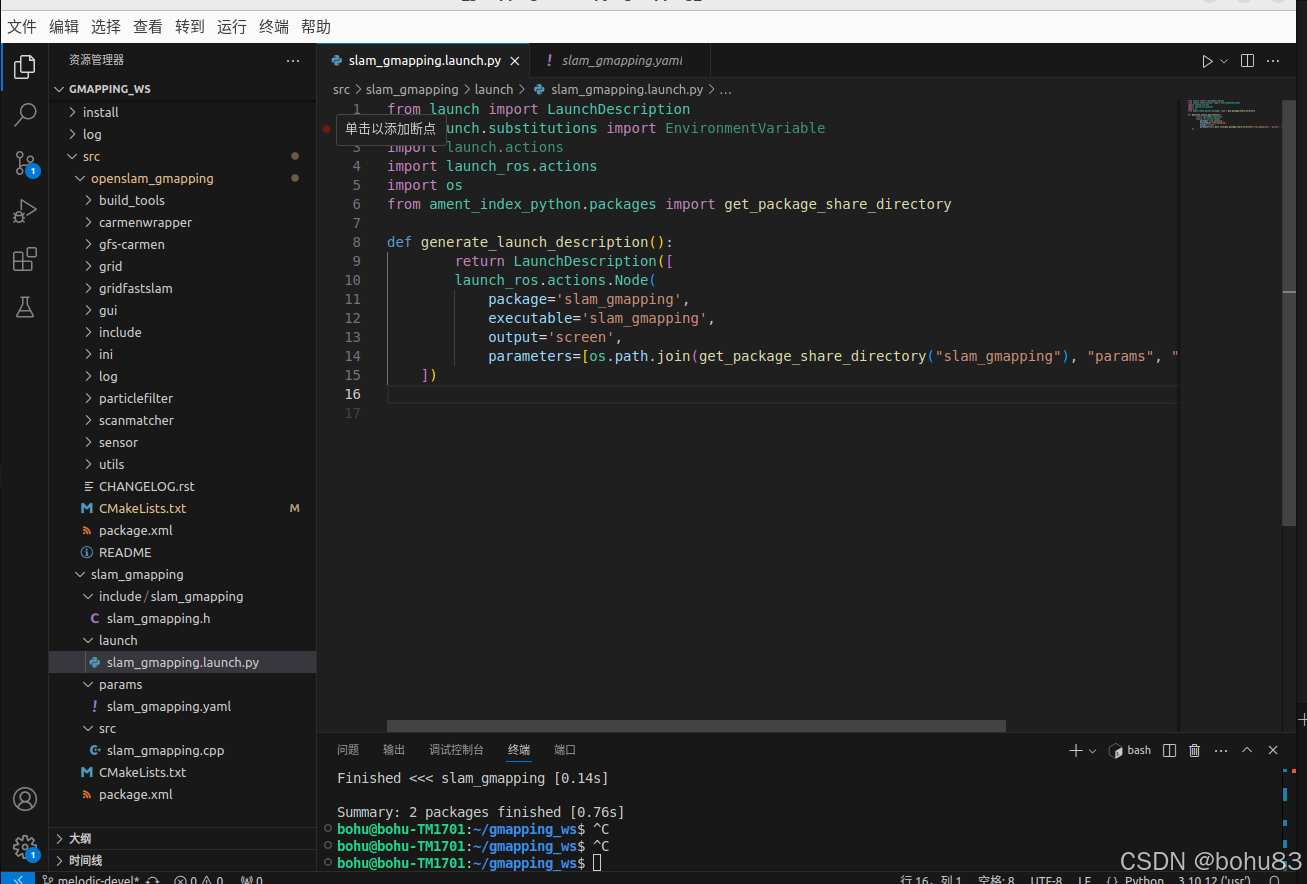
slam_gmapping.launch.py,这里启动了slam_gmapping的节点,加载了slam_gmapping.yaml参数文件。
slam_gmapping.yaml
/slam_gmapping:
ros__parameters:
angularUpdate: 0.5
astep: 0.05
base_frame: base_footprint
map_frame: map
odom_frame: odom
delta: 0.05
iterations: 5
kernelSize: 1
lasamplerange: 0.005
lasamplestep: 0.005
linearUpdate: 1.0
llsamplerange: 0.01
llsamplestep: 0.01
lsigma: 0.075
lskip: 0
lstep: 0.05
map_update_interval: 5.0
maxRange: 6.0
maxUrange: 4.0
minimum_score: 0.0
occ_thresh: 0.25
ogain: 3.0
particles: 30
qos_overrides:
/parameter_events:
publisher:
depth: 1000
durability: volatile
history: keep_all
reliability: reliable
/tf:
publisher:
depth: 1000
durability: volatile
history: keep_last
reliability: reliable
resampleThreshold: 0.5
sigma: 0.05
srr: 0.1
srt: 0.2
str: 0.1
stt: 0.2
temporalUpdate: 1.0
transform_publish_period: 0.05
use_sim_time: false
xmax: 10.0
xmin: -10.0
ymax: 10.0
ymin: -10.0
运行
启动小车代理:
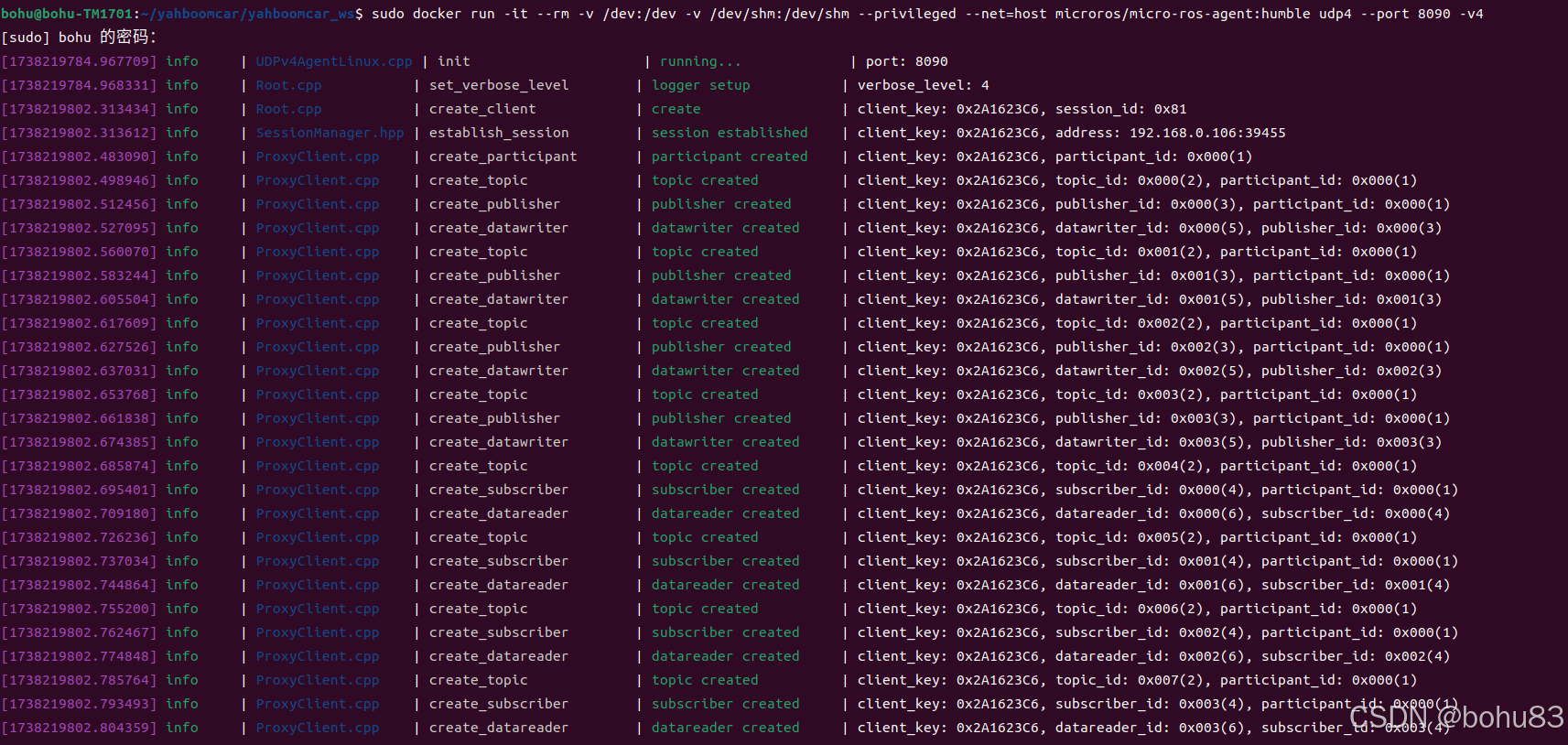
首先启动小车处理底层数据程序,
ros2 launch yahboomcar_bringup yahboomcar_bringup_launch.py
from ament_index_python.packages import get_package_share_path
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.conditions import IfCondition, UnlessCondition
from launch.substitutions import Command, LaunchConfiguration
from launch_ros.actions import Node
from launch_ros.parameter_descriptions import ParameterValue
def generate_launch_description():
package_path = get_package_share_path('yahboomcar_nav')
default_rviz_config_path = package_path / 'rviz/view.rviz'
rviz_arg = DeclareLaunchArgument(name='rvizconfig', default_value=str(default_rviz_config_path),
description='Absolute path to rviz config file')
rviz_node = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
output='screen',
arguments=['-d', LaunchConfiguration('rvizconfig')],
)
return LaunchDescription([
rviz_arg,
rviz_node
])
bohu@bohu-TM1701:~/yahboomcar/yahboomcar_ws$ ros2 launch yahboomcar_bringup yahboomcar_bringup_launch.py
[INFO] [launch]: All log files can be found below /home/bohu/.ros/log/2025-01-30-14-52-59-130561-bohu-TM1701-316456
[INFO] [launch]: Default logging verbosity is set to INFO
---------------------robot_type = x3---------------------
[INFO] [complementary_filter_node-1]: process started with pid [316458]
[INFO] [ekf_node-2]: process started with pid [316460]
[INFO] [static_transform_publisher-3]: process started with pid [316462]
[INFO] [joint_state_publisher-4]: process started with pid [316464]
[INFO] [robot_state_publisher-5]: process started with pid [316466]
[INFO] [static_transform_publisher-6]: process started with pid [316468]
[static_transform_publisher-3] [WARN] [1738219979.422738190] []: Old-style arguments are deprecated; see --help for new-style arguments
[static_transform_publisher-6] [WARN] [1738219979.430808316] []: Old-style arguments are deprecated; see --help for new-style arguments
[static_transform_publisher-3] [INFO] [1738219979.474861598] [base_link_to_base_imu]: Spinning until stopped - publishing transform
[static_transform_publisher-3] translation: ('-0.002999', '-0.003000', '0.031701')
[static_transform_publisher-3] rotation: ('0.000000', '0.000000', '0.000000', '1.000000')
[static_transform_publisher-3] from 'base_link' to 'imu_frame'
[static_transform_publisher-6] [INFO] [1738219979.486498703] [static_transform_publisher_dyynkHgPuvMB4QSZ]: Spinning until stopped - publishing transform
[static_transform_publisher-6] translation: ('0.000000', '0.000000', '0.050000')
[static_transform_publisher-6] rotation: ('0.000000', '0.000000', '0.000000', '1.000000')
[static_transform_publisher-6] from 'base_footprint' to 'base_link'
[complementary_filter_node-1] [INFO] [1738219979.494221633] [complementary_filter_gain_node]: Starting ComplementaryFilterROS
[robot_state_publisher-5] [WARN] [1738219979.497129656] [kdl_parser]: The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF.
[robot_state_publisher-5] [INFO] [1738219979.497311822] [robot_state_publisher]: got segment base_link
[robot_state_publisher-5] [INFO] [1738219979.497405894] [robot_state_publisher]: got segment imu_Link
[robot_state_publisher-5] [INFO] [1738219979.497427256] [robot_state_publisher]: got segment jq1_Link
[robot_state_publisher-5] [INFO] [1738219979.497440404] [robot_state_publisher]: got segment jq2_Link
[robot_state_publisher-5] [INFO] [1738219979.497453384] [robot_state_publisher]: got segment radar_Link
[robot_state_publisher-5] [INFO] [1738219979.497465220] [robot_state_publisher]: got segment yh_Link
[robot_state_publisher-5] [INFO] [1738219979.497477294] [robot_state_publisher]: got segment yq_Link
[robot_state_publisher-5] [INFO] [1738219979.497489516] [robot_state_publisher]: got segment zh_Link
[robot_state_publisher-5] [INFO] [1738219979.497501480] [robot_state_publisher]: got segment zq_Link
[joint_state_publisher-4] [INFO] [1738219980.049008205] [joint_state_publisher]: Waiting for robot_description to be published on the robot_description topic...
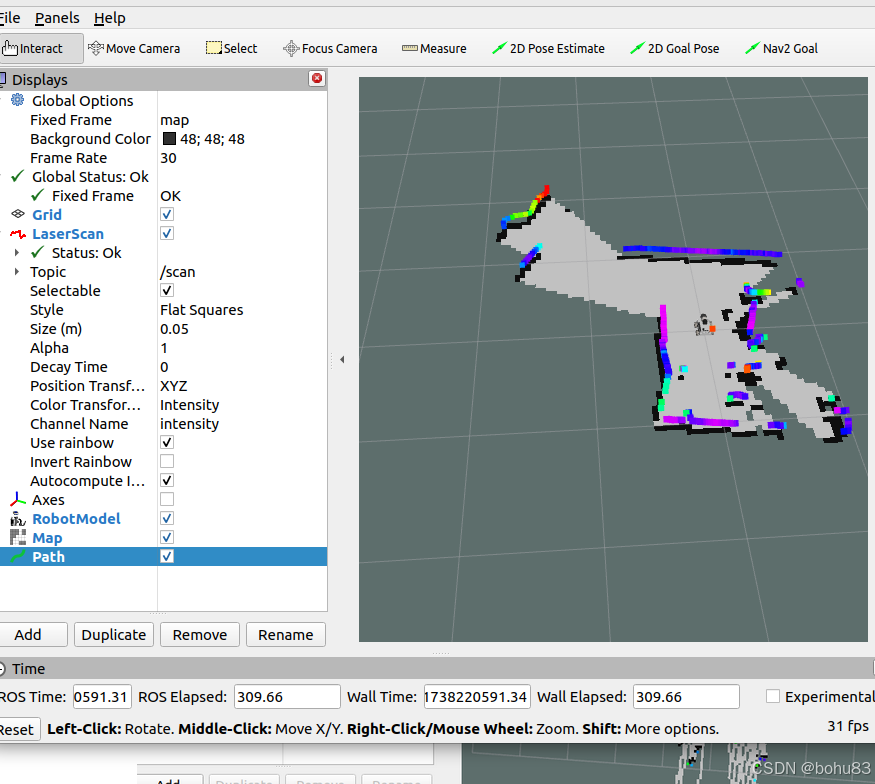
然后,启动rviz,可视化建图,终端输入,
ros2 launch yahboomcar_nav display_launch.py
此时还没运行建图节点,所以没有数据。接下来运行建图节点,终端输入,
ros2 launch yahboomcar_nav map_gmapping_launch.py
from launch import LaunchDescription
from launch_ros.actions import Node
import os
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
slam_gmapping_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('slam_gmapping'), 'launch'),
'/slam_gmapping.launch.py'])
)
base_link_to_laser_tf_node = Node(
package='tf2_ros',
executable='static_transform_publisher',
name='base_link_to_base_laser',
arguments=['-0.0046412', '0' , '0.094079','0','0','0','base_link','laser_frame']
)
return LaunchDescription([slam_gmapping_launch,base_link_to_laser_tf_node])
#启动键盘控制 ros2 run yahboomcar_ctrl yahboom_keyboard
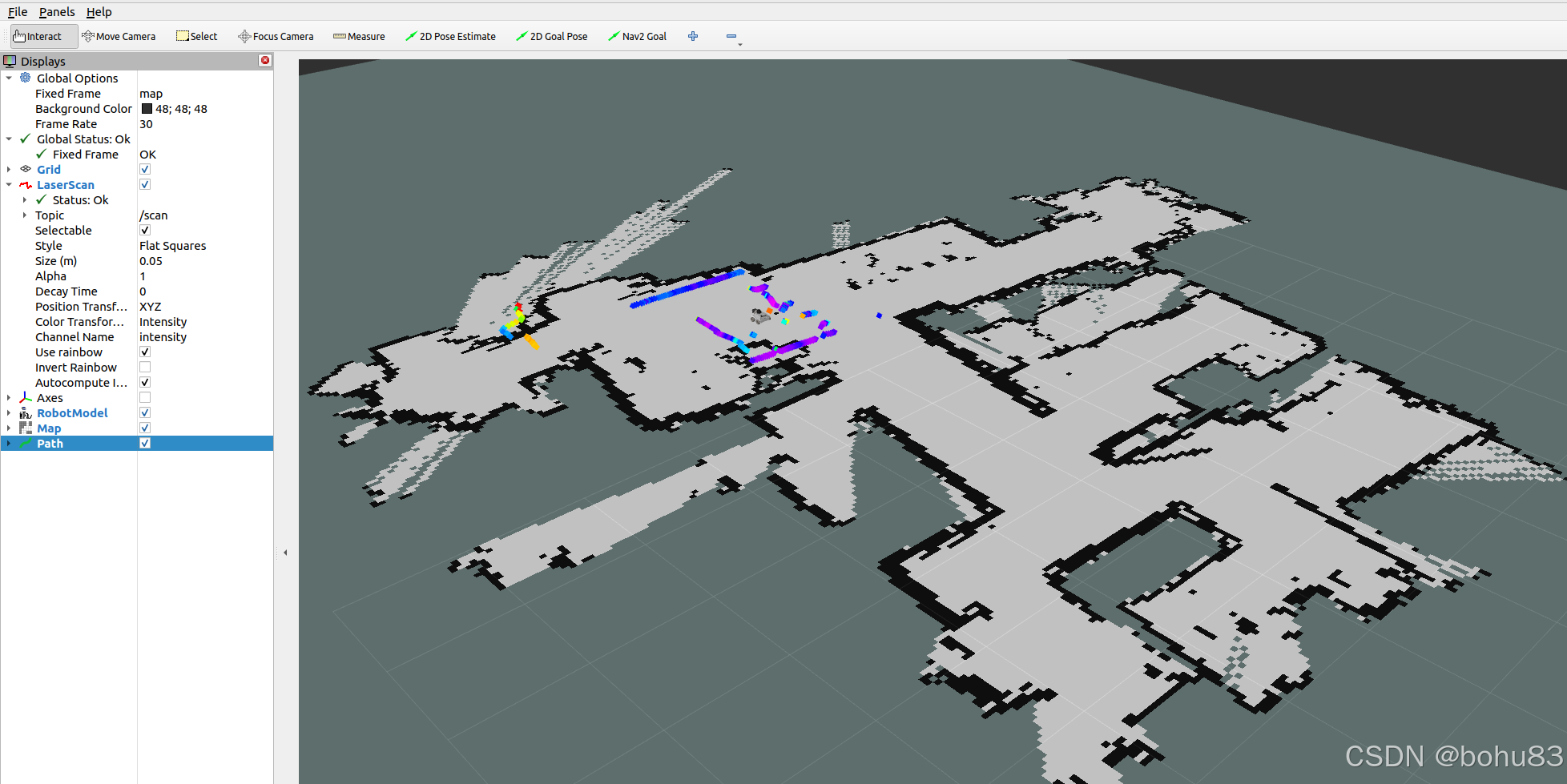
控制小车慢慢转一圈。最终效果如下
生成的map
建图完毕后,输入以下指令保存地图,终端输入,
ros2 launch yahboomcar_nav save_map_launch.py
from ament_index_python.packages import get_package_share_path
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
import os
def generate_launch_description():
package_share_path = str(get_package_share_path('yahboomcar_nav'))
package_path = os.path.abspath(os.path.join(
package_share_path, "../../../../src/yahboomcar_nav"))
map_name = "yahboom_map"
default_map_path = os.path.join(package_path, 'maps', map_name)
map_arg = DeclareLaunchArgument(name='map_path', default_value=str(default_map_path),
description='The path of the map')
map_saver_node = Node(
package='nav2_map_server',
executable='map_saver_cli',
arguments=[
'-f', LaunchConfiguration('map_path'), '--ros-args', '-p', 'save_map_timeout:=60000.00'],
)
return LaunchDescription([
map_arg,
map_saver_node
])
bohu@bohu-TM1701:~/yahboomcar/yahboomcar_ws$ ros2 launch yahboomcar_nav save_map_launch.py
[INFO] [launch]: All log files can be found below /home/bohu/.ros/log/2025-01-30-15-33-14-161314-bohu-TM1701-319017
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [map_saver_cli-1]: process started with pid [319018]
[map_saver_cli-1] [INFO] [1738222394.419546962] [map_saver]:
[map_saver_cli-1] map_saver lifecycle node launched.
[map_saver_cli-1] Waiting on external lifecycle transitions to activate
[map_saver_cli-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[map_saver_cli-1] [INFO] [1738222394.419654445] [map_saver]: Creating
[map_saver_cli-1] [INFO] [1738222394.419713380] [map_saver]: Configuring
[map_saver_cli-1] [INFO] [1738222394.420777030] [map_saver]: Saving map from 'map' topic to '/home/bohu/yahboomcar/yahboomcar_ws/src/yahboomcar_nav/maps/yahboom_map' file
[map_saver_cli-1] [WARN] [1738222394.420801411] [map_saver]: Free threshold unspecified. Setting it to default value: 0.250000
[map_saver_cli-1] [WARN] [1738222394.420813330] [map_saver]: Occupied threshold unspecified. Setting it to default value: 0.650000
[map_saver_cli-1] [WARN] [1738222395.293844583] [map_io]: Image format unspecified. Setting it to: pgm
[map_saver_cli-1] [INFO] [1738222395.294086677] [map_io]: Received a 384 X 608 map @ 0.05 m/pix
[map_saver_cli-1] [INFO] [1738222395.473549155] [map_io]: Writing map occupancy data to /home/bohu/yahboomcar/yahboomcar_ws/src/yahboomcar_nav/maps/yahboom_map.pgm
[map_saver_cli-1] [INFO] [1738222395.474901659] [map_io]: Writing map metadata to /home/bohu/yahboomcar/yahboomcar_ws/src/yahboomcar_nav/maps/yahboom_map.yaml
[map_saver_cli-1] [INFO] [1738222395.475071124] [map_io]: Map saved
[map_saver_cli-1] [INFO] [1738222395.475082707] [map_saver]: Map saved successfully
[map_saver_cli-1] [INFO] [1738222395.737027994] [map_saver]: Destroying
[INFO] [map_saver_cli-1]: process has finished cleanly [pid 319018]
会有两个文件生成,一个是yahboom_map.pgm,一个是yahboom_map.yaml,看下yaml的内容,
image: yahboom_map.pgm
mode: trinary
resolution: 0.05
origin: [-10, -10, 0]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.25
-
image:表示地图的图片,也就是yahboom_map.pgm
-
mode:该属性可以是trinary、scale或者raw之一,取决于所选择的mode,trinary模式是默认模式
-
resolution:地图的分辨率, 米/像素
-
origin:地图左下角的 2D 位姿(x,y,yaw), 这里的yaw是逆时针方向旋转的(yaw=0 表示没有旋转)。目前系统中的很多部分会忽略yaw值。
-
negate:是否颠倒 白/黑 、自由/占用 的意义(阈值的解释不受影响)
-
occupied_thresh:占用概率大于这个阈值的的像素,会被认为是完全占用。
-
free_thresh:占用概率小于这个阈值的的像素,会被认为是完全自由。
其他的属性:
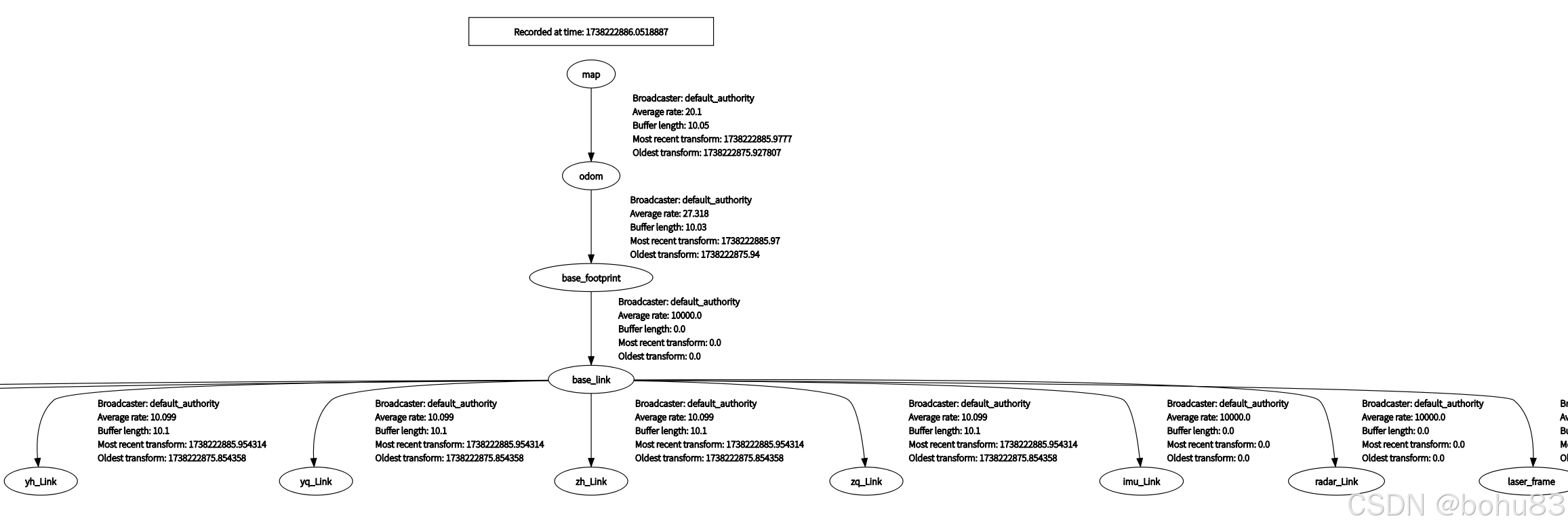
TFtree
节点通讯图
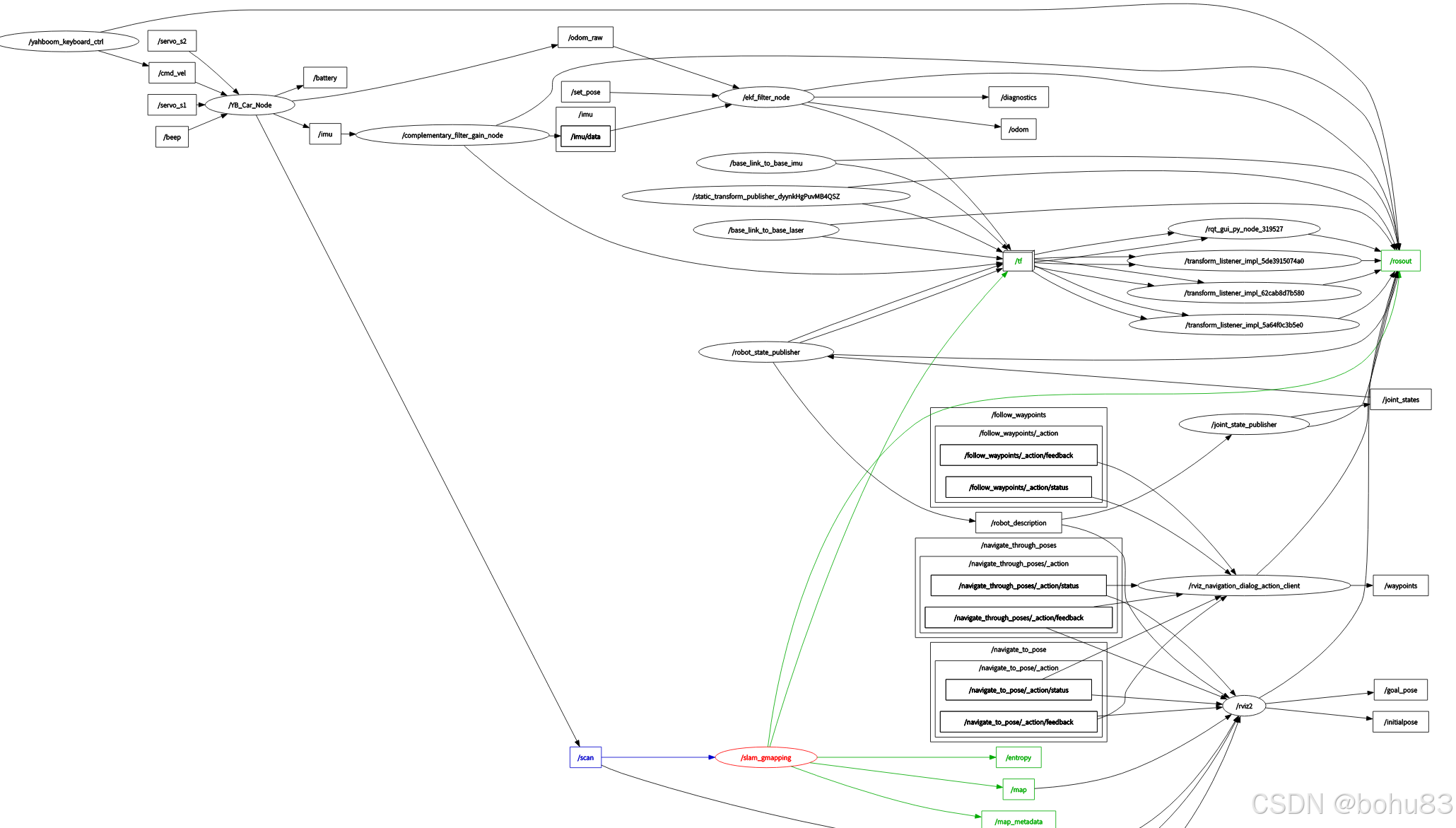
应该是小车第一次运行激光雷达进行建图。
以上