本文所述的MATLAB代码实现了一个基于两步加权最小二乘法的二维目标定位算法,利用多个锚点(基站)和时间差到达(TDOA)数据来估计未知目标的位置。
文章目录
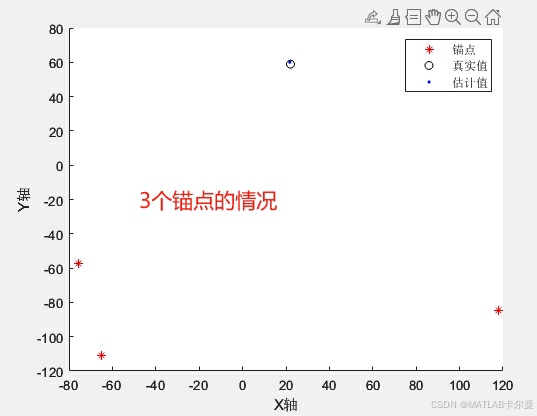
运行结果
- 3个锚点时的情况:
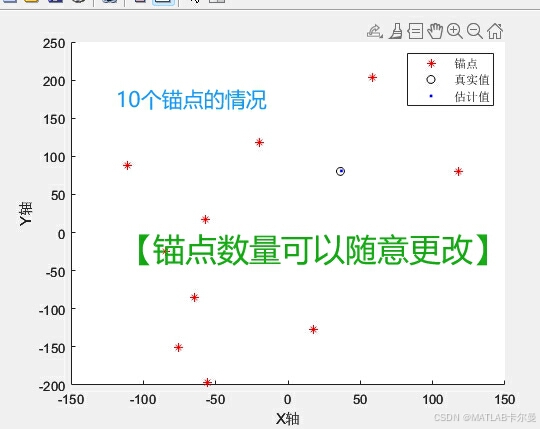
- 10个锚点时的情况:
-
可一键更改锚点数量:
-
命令行会输出真实值和估计值的坐标信息:
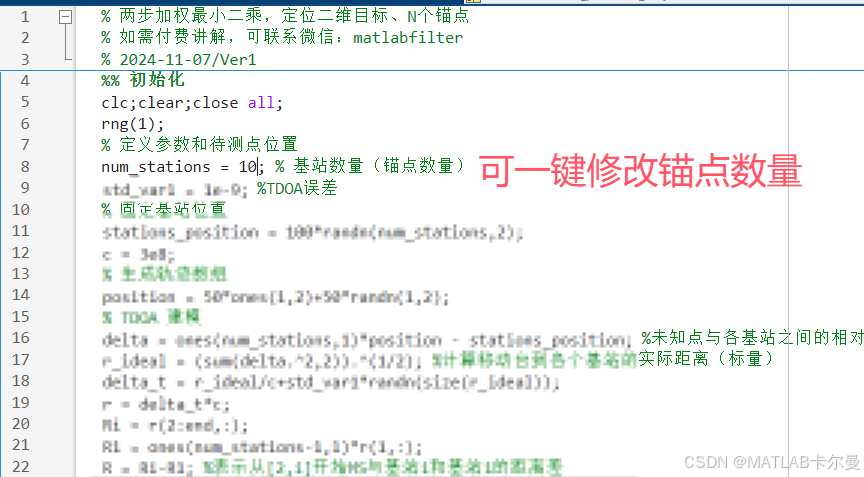
代码
% 两步加权最小二乘,定位二维目标、N个锚点
% 2024-11-07/Ver1
%% 初始化
clc;clear;close all;
rng(1);
% 定义参数和待测点位置
num_stations = 10; % 基站数量(锚点数量)
std_var1 = 1e-9; %TDOA误差
% 固定基站位置
stations_position = 100*randn(num_stations,2);
c = 3e8;
% 生成轨迹数组
position = 50*ones(1,2)+50*randn(1,2);
% TDOA 建模
% 完整代码见:https://gf.bilibili.com/item/detail/1106616012
代码功能概述
该代码模拟了一个二维空间中的目标定位问题,使用随机生成的锚点位置和目标轨迹,并通过最小二乘法进行位置估计。目标的真实位置与估计位置通过图形可视化展示,便于对算法效果的直观理解。
代码结构和详细说明
初始化部分
clc; clear; close all;
rng(1);
clc:清除命令窗口的内容。clear:清除工作空间中的所有变量。close all:关闭所有打开的图形窗口。rng(1):设置随机数生成器的种子,以确保结果的可重复性。
参数和待测点位置定义
num_stations = 10; % 基站数量(锚点数量)
std_var1 = 1e-9; % TDOA误差
stations_position = 100 * randn(num_stations, 2); % 随机生成基站位置
c = 3e8; % 声速
num_stations:定义基站的数量,这里设为10个。std_var1:设定TDOA测量的标准差,用于模拟测量误差。stations_position:随机生成基站在二维空间中的位置,坐标值为正态分布。c:定义声速(单位:米/秒)。
生成目标轨迹
position = 50 * ones(1, 2) + 50 * randn(1, 2);
- 生成一个目标位置,初始位置为(50, 50)附近的一个随机点。
TDOA建模
delta = ones(num_stations, 1) * position - stations_position; % 计算未知点与基站的相对位置
r_ideal = (sum(delta.^2, 2)).^(1/2); % 计算理想距离
delta_t = r_ideal / c + std_var1 * randn(size(r_ideal)); % 计算TDOA并添加噪声
r = delta_t * c; % 计算实际距离
delta:计算未知目标与各基站之间的相对位置(矢量)。r_ideal:根据相对位置计算目标到各个基站的理想距离。delta_t:根据理想距离计算到达时间,并添加高斯噪声。r:将到达时间转换为实际距离。
距离差计算
Ri = r(2:end, :);
R1 = ones(num_stations - 1, 1) * r(1, :);
R = Ri - R1; % 计算距离差
- 计算从第一个基站到其他基站的距离差,这将用于后续的最小二乘法计算。
迭代初值估算
position_est = mean(stations_position); % 基站位置均值作为初始估计
- 使用所有基站位置的均值作为初始位置估计。
最小二乘迭代
for i1 = 1:100 % 可设置迭代次数
...
end
- 迭代100次以优化位置估计,每次迭代计算新的位置估计。
粗迭代部分
h = (R(1))^2 + norm(stations_position(1, :))^2 - norm(stations_position(2, :))^2 + 2 * (R(1)) * norm(position_est - stations_position(1, :));
Ga = 2 * (stations_position(1, :) - stations_position(2, :));
B = 2 * diag([norm(position_est - stations_position(2, :));]);
- 计算初步的残差和雅可比矩阵的构造。
细节迭代部分
for i2 = 3:num_stations
...
end
- 在每次迭代中,更新残差
h和雅可比矩阵A,并计算最小二乘解。
最小二乘解
Q = std_var1^2 * (0.5 * eye(num_stations - 1) + 0.5 * ones(num_stations - 1));
W = (B * Q * B')^(-1); % 计算加权矩阵
u_star = (Ga' * W * Ga)^(-1) * Ga' * W * h; % 计算最小二乘解
- 构造加权矩阵
W,计算最小二乘解u_star,用于更新位置估计。
结果绘图
figure;
hold on
plot(stations_position(:, 1), stations_position(:, 2), 'r*'); % 绘制基站位置
plot(position(1), position(2), 'ok'); % 绘制真实目标位置
plot(position_est(1), position_est(2), '.b'); % 绘制估计目标位置
xlabel('X轴'); ylabel('Y轴');
legend('锚点', '真实值', '估计值');
- 可视化锚点、真实位置和估计位置,便于观察定位效果。
10. 输出结果
fprintf('真实值坐标:%s\n', num2str(position));
fprintf('估计值坐标:%s\n', num2str(position_est));
- 打印真实目标位置和估计位置的坐标。
总结
该 M A T L A B MATLAB MATLAB代码使用两步加权最小二乘法通过 T D O A TDOA TDOA技术实现了二维目标定位。它通过随机生成的锚点和目标位置进行模拟,展示了如何通过迭代优化算法来提高位置估计的准确性。代码结构清晰,适合用于理解和实现基于 T D O A TDOA TDOA的定位算法。
如有需要,可私信或通过下方的卡片联系我