目录
半主动悬架控制系统是汽车工程领域的一项重要技术,旨在通过实时调整悬架系统的阻尼力,以改善车辆的行驶平顺性和操纵稳定性。二自由度模型是分析和设计这类系统的基础,它主要考虑车身垂直方向的位移和车轮相对于地面的垂直振动。
1. 系统模型
二自由度半主动悬架系统模型通常包括车身质量mb、车轮质量mw、弹簧刚度kf和kb(前悬和后悬)、阻尼系数cf和cb(可调)、轮胎刚度kt以及地面。系统动力学可以用以下微分方程组描述:

其中,zb 和 zw 分别代表车身和车轮相对于地面的垂直位移;zb¨ 和 zw¨ 是它们的加速度;zg 是地面位移,假设为0;ct 是轮胎的阻尼系数,通常视为常数。
2. 半主动控制策略
半主动控制的关键在于实时调整阻尼系数cf和cb,以适应不同路况。常见的控制策略有Skyhook控制、Frequency Commanded Damping (FCD)控制等。
Skyhook控制策略的目标是使车体尽可能保持静止,仿佛悬挂在“天空的钩子”上。其控制律可表示为:

其中,Ksky是Skyhook增益,zr˙是参考输入,通常取地面速度的负值或预设的期望车体速度变化率,以减少车体振动。
FCD控制策略是根据目标频率来调整阻尼系数,以优化悬架系统的频率响应特性。其阻尼调整公式为:

其中,ζ为阻尼比,ωn为目标固有频率,通过调整这两个参数可以改变悬架系统的动态性能。
3. 控制器设计与实现
半主动悬架控制系统的实现通常包括传感器(如加速度计、位移传感器)、执行器(电磁阀或磁流变阻尼器)和电子控制单元(ECU)。ECU根据车身和车轮的位移、速度信息,按照选定的控制策略计算出所需的阻尼力,然后调节执行器改变悬架阻尼系数。
4.仿真程序
..................................................................
% 状态空间方程形式如下
% 其中A为状态矩阵,B为输入矩阵,B_U为控制器输入矩阵,B_W为干扰输入矩阵,
% C为输出矩阵,D为直接输入/输出耦合矩阵,在此系统中为零。
%% 传递函数
% 上述状态空间的传递函数定义为:
% T11: 输出=y1,输入=u
% T12: 输出=y1,输入=w
% y1=d(Zs)/dt,车身垂直速度,T11是输出y1对输入u的传递函数
[n11,d11]=ss2tf(A,B_U,C3,D1);
T11=tf(n11,d11)
% y1=d(Zs)/dt,车身垂直速度,T12是输出y1对输入w的传递函数
[n12,d12]=ss2tf(A,B_W,C3,D1);
T12=tf(n12,d12)
% 轮胎速度
% y4=X4,轮胎垂直速度,输入w
C14=[0 0 0 1]
[n4,d4]=ss2tf(A,B_W,C14,D1);
T4=tf(n4,d4)
%% 可控性和可观测性检查
% 检查系统的可控性
rank(ctrb(A,B_U))
% 控制矩阵满秩(秩为4),系统可控
% 检查输出的可观测性
rank(obsv(A,C3))
% 观测矩阵满秩(秩为4),系统可观测
%% 根轨迹图
figure
subplot(1,2,1);
rlocus(T12)
title('Y1/W的根轨迹');
subplot(1,2,2);
rlocus(T11)
title('Y1/U的根轨迹');
%% 阶跃响应
figure
subplot(1,3,1);
step(T11)
title('Y1/U阶跃响应(m/s)');
subplot(1,3,2);
step(T12)
title('Y1/W阶跃响应(m/s)');
subplot(1,3,3);
step(T4)
title('Y2/W阶跃响应(m/s^2)');
%% 控制器设计
% T12的零点
num_T=[3223 1.055e05];
roots(num_T)
% T12的极点
den_T=[1 7.244 3879 3223 1.055e05];
roots(den_T)
% 使用两个PD控制器
G=0.0005;
Zc=tf([1 2.2 1.21],[1]);
% Pc=tf([1],[1 100 2500]);
Tcomp=(G*T12*Zc) % 结合两个PD控制器
a=tf([1 0],[1]);
acc=(Tcomp*a)
% 控制系统根轨迹图
figure
rlocus(Tcomp)
title('控制系统根轨迹');
figure
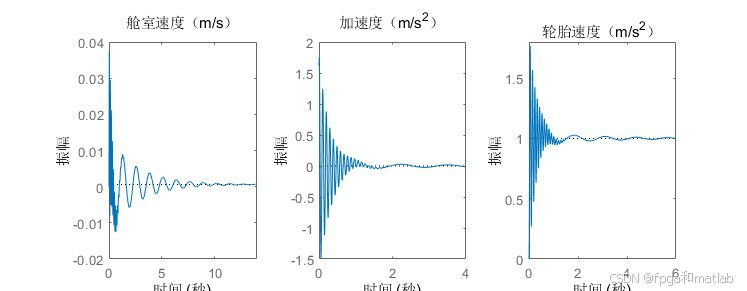
subplot(1,3,1);
step(Tcomp)
title('舱室速度(m/s)');
subplot(1,3,2);
step(acc)
title('加速度(m/s^2)');
subplot(1,3,3);
step(T4)
title('轮胎速度(m/s^2)');
% 控制律 Fd=U(t)=Ms*S*X3 - Ks*X1 - Cs*(X4-X3)
up41115.仿真结果



评估半主动悬架控制系统性能的主要指标包括乘坐舒适性、操纵稳定性、响应速度和能耗。常用的方法是通过仿真软件(如MATLAB/Simulink)构建系统模型,进行时域或频域分析,比较不同控制策略下的车身加速度响应、悬挂动行程等参数。基于二自由度的半主动悬架控制系统通过实时调整悬架阻尼特性,有效提升了车辆行驶的舒适性和操控性能。通过选择合适的控制策略和参数,可以在各种路况下提供最佳的乘坐体验和驾驶安全性。