2.layer_normalization
1.Normalization
1.1 Batch Norm
为什么要进行BN呢?
- 在深度神经网络训练的过程中,通常以输入网络的每一个mini-batch进行训练,这样每个batch具有不同的分布,使模型训练起来特别困难。
- Internal Covariate Shift (ICS) 问题:在训练的过程中,激活函数会改变各层数据的分布,随着网络的加深,这种改变(差异)会越来越大,使模型训练起来特别困难,收敛速度很慢,会出现梯度消失的问题。
BN的主要思想: 针对每个神经元,使数据在进入激活函数之前,沿着通道计算每个batch的均值、方差,‘强迫’数据保持均值为0,方差为1的正态分布, 避免发生梯度消失。具体来说,就是把第1个样本的第1个通道,加上第2个样本第1个通道 … 加上第 N 个样本第1个通道,求平均,得到通道 1 的均值(注意是除以 N×H×W 而不是单纯除以 N,最后得到的是一个代表这个 batch 第1个通道平均值的数字,而不是一个 H×W 的矩阵)。求通道 1 的方差也是同理。对所有通道都施加一遍这个操作,就得到了所有通道的均值和方差。
BN的使用位置: 全连接层或卷积操作之后,激活函数之前。
BN算法过程:
- 沿着通道计算每个batch的均值
- 沿着通道计算每个batch的方差
- 做归一化
- 加入缩放和平移变量 γ \gamma γ和 β \beta β
加入缩放和平移变量的原因是:保证每一次数据经过归一化后还保留原有学习来的特征,同时又能完成归一化操作,加速训练。 这两个参数是用来学习的参数。
BN的作用:
- 允许较大的学习率;
- 减弱对初始化的强依赖性
- 保持隐藏层中数值的均值、方差不变,让数值更稳定,为后面网络提供坚实的基础;
- 有轻微的正则化作用(相当于给隐藏层加入噪声,类似Dropout)
BN存在的问题:
- 每次是在一个batch上计算均值、方差,如果batch size太小,则计算的均值、方差不足以代表整个数据分布。
- batch size太大: 会超过内存容量;需要跑更多的epoch,导致总训练时间变长;会直接固定梯度下降的方向,导致很难更新。
1.2 Layer Norm
LayerNorm是大模型也是transformer结构中最常用的归一化操作,简而言之,它的作用是 对特征张量按照某一维度或某几个维度进行0均值,1方差的归一化 操作,计算公式为:
y = x − E ( x ) V ar ( x ) + ϵ ∗ γ + β \mathrm{y}=\frac{\mathrm{x}-\mathrm{E}(\mathrm{x})}{\sqrt{\mathrm{V} \operatorname{ar}(\mathrm{x})+\epsilon}} * \gamma+\beta y=Var(x)+ϵx−E(x)∗γ+β
这里的 x x x 可以理解为** 张量中具体某一维度的所有元素**,比如对于 shape 为 (2,2,4) 的张量 input,若指定归一化的操作为第三个维度,则会对第三个维度中的四个张量(2,2,1),各进行上述的一次计算.
详细形式:
a i = ∑ j = 1 m w i j x j , y i = f ( a i + b i ) a_{i}=\sum_{j=1}^{m} w_{i j} x_{j}, \quad y_{i}=f\left(a_{i}+b_{i}\right) ai=j=1∑mwijxj,yi=f(ai+bi)
a ˉ i = a i − μ σ g i , y i = f ( a ˉ i + b i ) , \bar{a}_{i}=\frac{a_{i}-\mu}{\sigma} g_{i}, \quad y_{i}=f\left(\bar{a}_{i}+b_{i}\right), aˉi=σai−μgi,yi=f(aˉi+bi),
μ = 1 n ∑ i = 1 n a i , σ = 1 n ∑ i = 1 n ( a i − μ ) 2 . \mu=\frac{1}{n} \sum_{i=1}^{n} a_{i}, \quad \sigma=\sqrt{\frac{1}{n} \sum_{i=1}^{n}\left(a_{i}-\mu\right)^{2}}. μ=n1i=1∑nai,σ=n1i=1∑n(ai−μ)2.
这里结合PyTorch的nn.LayerNorm算子来看比较明白:
nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True, device=None, dtype=None)
normalized_shape:归一化的维度,int(最后一维)list(list里面的维度),还是以(2,2,4)为例,如果输入是int,则必须是4,如果是list,则可以是[4], [2,4], [2,2,4],即最后一维,倒数两维,和所有维度eps:加在分母方差上的偏置项,防止分母为0elementwise_affine:是否使用可学习的参数 γ \gamma γ 和 β \beta β ,前者开始为1,后者为0,设置该变量为True,则二者均可学习随着训练过程而变化
Layer Normalization (LN) 的一个优势是不需要批训练,在单条数据内部就能归一化。LN不依赖于batch size和输入sequence的长度,因此可以用于batch size为1和RNN中。LN用于RNN效果比较明显,但是在CNN上,效果不如BN。
1.3 Instance Norm
IN针对图像像素做normalization,最初用于图像的风格化迁移。在图像风格化中,生成结果主要依赖于某个图像实例,feature map 的各个 channel 的均值和方差会影响到最终生成图像的风格。所以对整个batch归一化不适合图像风格化中,因而对H、W做归一化。可以加速模型收敛,并且保持每个图像实例之间的独立。
对于,IN 对每个样本的 H、W 维度的数据求均值和标准差,保留 N 、C 维度,也就是说,它只在 channel 内部求均值和标准差,其公式如下:
y t i j k = x t i j k − μ t i σ t i 2 + ϵ μ t i = 1 H W ∑ l = 1 W ∑ m = 1 H x t i l m σ t i 2 = 1 H W ∑ l = 1 W ∑ m = 1 H ( x t i l m − m u t i ) 2 y_{t i j k}=\frac{x_{t i j k}-\mu_{t i}}{\sqrt{\sigma_{t i}^{2}+\epsilon}} \quad \mu_{t i}=\frac{1}{H W} \sum_{l=1}^{W} \sum_{m=1}^{H} x_{t i l m} \quad \sigma_{t i}^{2}=\frac{1}{H W} \sum_{l=1}^{W} \sum_{m=1}^{H}\left(x_{t i l m}-m u_{t i}\right)^{2} ytijk=σti2+ϵxtijk−μtiμti=HW1l=1∑Wm=1∑Hxtilmσti2=HW1l=1∑Wm=1∑H(xtilm−muti)2
1.5 Group Norm
GN是为了解决BN对较小的mini-batch size效果差的问题**。**
GN适用于占用显存比较大的任务,例如图像分割。对这类任务,可能 batch size 只能是个位数,再大显存就不够用了。而当 batch size 是个位数时,BN 的表现很差,因为没办法通过几个样本的数据量,来近似总体的均值和标准差。GN 也是独立于 batch 的,它是 LN 和 IN 的折中。
具体方法: GN 计算均值和标准差时,把每一个样本 feature map 的 channel 分成 G 组,每组将有 C/G 个 channel,然后将这些 channel 中的元素求均值和标准差。各组 channel 用其对应的归一化参数独立地归一化。
μ n g ( x ) = 1 ( C / G ) H W ∑ c = g C / G ( g + 1 ) C / G ∑ h = 1 H ∑ w = 1 W x n c h w \mu_{n g}(x)=\frac{1}{(C / G) H W} \sum_{c=g C / G}^{(g+1) C / G} \sum_{h=1}^{H} \sum_{w=1}^{W} x_{n c h w} μng(x)=(C/G)HW1c=gC/G∑(g+1)C/Gh=1∑Hw=1∑Wxnchw
σ n g ( x ) = 1 ( C / G ) H W ∑ c = g C / G ( g + 1 ) C / G ∑ h = 1 H ∑ w = 1 W ( x n c h w − μ n g ( x ) ) 2 + ϵ \sigma_{n g}(x)=\sqrt{\frac{1}{(C / G) H W} \sum_{c=g C / G}^{(g+1) C / G} \sum_{h=1}^{H} \sum_{w=1}^{W}\left(x_{n c h w}-\mu_{n g}(x)\right)^{2}+\epsilon} σng(x)=(C/G)HW1c=gC/G∑(g+1)C/Gh=1∑Hw=1∑W(xnchw−μng(x))2+ϵ
1.6 RMS Norm
与layerNorm相比,RMS Norm的主要区别在于去掉了减去均值的部分,计算公式为:
a ˉ i = a i RMS ( a ) g i , w h e r e RMS ( a ) = 1 n ∑ i = 1 n a i 2 . \bar{a}_{i}=\frac{a_{i}}{\operatorname{RMS}(\mathbf{a})} g_{i}, \quad where~ \operatorname{RMS}(\mathbf{a})=\sqrt{\frac{1}{n} \sum_{i=1}^{n} a_{i}^{2}}. aˉi=RMS(a)aigi,where RMS(a)=n1i=1∑nai2.
RMS中去除了mean的统计值的使用,只使用root mean square(RMS)进行归一化。
1.4 pRMSNorm介绍
RMS具有线性特征,所以提出可以用部分数据的RMSNorm来代替全部的计算,pRMSNorm表示使用前p%的数据计算RMS值。k=n*p表示用于RMS计算的元素个数。实测中,使用6.25%的数据量可以收敛
RMS ‾ ( a ) = 1 k ∑ i = 1 k a i 2 \overline{\operatorname{RMS}}(\mathbf{a})=\sqrt{\frac{1}{k} \sum_{i=1}^{k} a_{i}^{2}} RMS(a)=k1i=1∑kai2
1.7 Deep Norm
Deep Norm是对Post-LN的的改进,具体的:
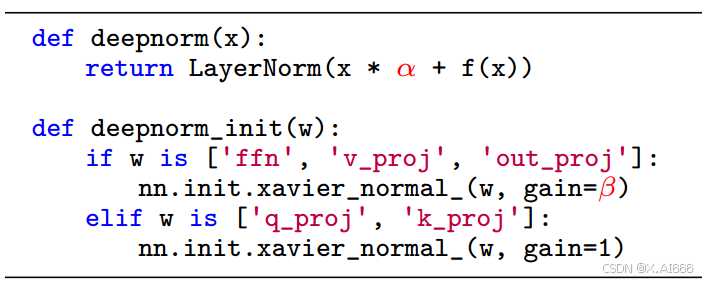
- DeepNorm在进行Layer Norm之前会以 α \alpha α 参数扩大残差连接
- 在Xavier参数初始化过程中以 β \beta β 减小部分参数的初始化范围
一些模型的具体参数使用方法如下:
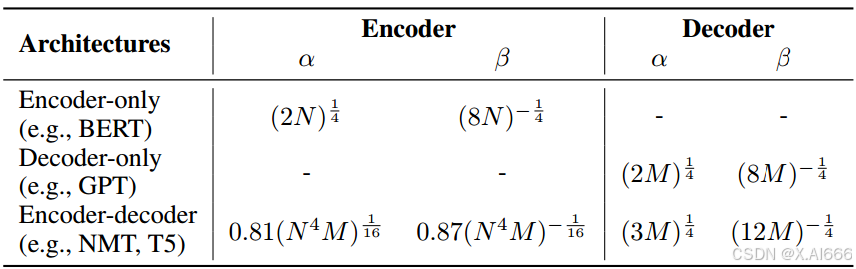
论文中,作者认为 Post-LN 的不稳定性部分来自于梯度消失以及太大的模型更新,同时,有以下几个理论分析
- 定义了“预期模型更新”的概念表示 模型更新的规模量级
- 证明了 W Q W^Q WQ和 W K W^K WK不会改变注意力输出大小数量级的界限,因而 β \beta β 并没有缩小这部分参数
- 模型倾向于累积每个子层的更新,从而导致模型更新量呈爆炸式增长,从而使早期优化变得不稳定
- 使用Deep Norm 的 “预期模型更新”,在参数 α , β \alpha, \beta α,β 取值适当的时候,以常数为界
同时,作者通过实验证实了Deep Norm在训练深层transformer模型的时候具备近乎恒定的更新规模,成功训练了1000层transformer的模型,认为Deep Norm在具备 Post-LN 的良好性能 的同时又有 Pre-LN 的稳定训练
代码实现:microsoft/torchscale: Foundation Architecture for (M)LLMs
2. BN & LN & IN & GN
常用的Normalization方法主要有:
- Batch Normalization(BN,2015年)、
- Layer Normalization(LN,2016年)、
- Instance Normalization(IN,2017年)、
- Group Normalization(GN,2018年)。
它们都是从激活函数的输入来考虑、做文章的,以不同的方式对激活函数的输入进行 Norm 的。
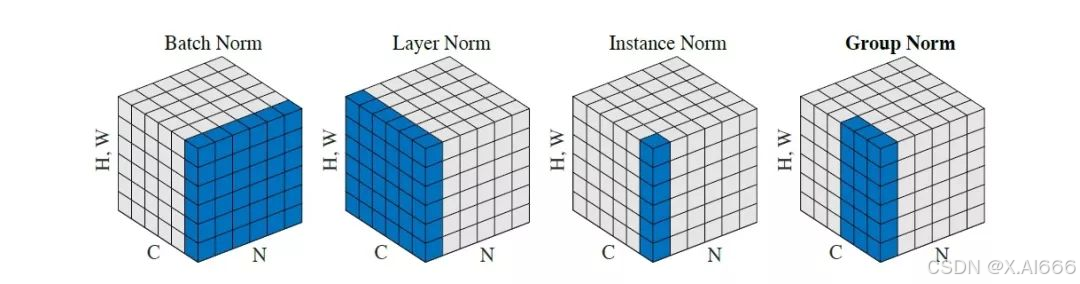
将输入的 feature map shape 记为**[N, C, H, W]**,其中N表示batch size,即N个样本;C表示通道数;H、W分别表示特征图的高度、宽度。这几个方法主要的区别就是在:
- BN是在batch上,对N、H、W做归一化,而保留通道 C 的维度。BN对较小的batch size效果不好。BN适用于固定深度的前向神经网络,如CNN,不适用于RNN;
- LN在通道方向上,对C、H、W归一化,主要对RNN效果明显;
- IN在图像像素上,对H、W做归一化,用在风格化迁移;
- GN将channel分组,然后再做归一化。
比喻成一摞书,这摞书总共有 N 本,每本有 C 页,每页有 H 行,每行 有W 个字符。
- BN 求均值时,相当于把这些书按页码一一对应地加起来(例如第1本书第36页,第2本书第36页…),再除以每个页码下的字符总数:N×H×W,因此可以把 BN 看成求“平均书”的操作(注意这个“平均书”每页只有一个字),求标准差时也是同理。
- LN 求均值时,相当于把每一本书的所有字加起来,再除以这本书的字符总数:C×H×W,即求整本书的“平均字”,求标准差时也是同理。
- IN 求均值时,相当于把一页书中所有字加起来,再除以该页的总字数:H×W,即求每页书的“平均字”,求标准差时也是同理。
- GN 相当于把一本 C 页的书平均分成 G 份,每份成为有 C/G 页的小册子,求每个小册子的“平均字”和字的“标准差”。
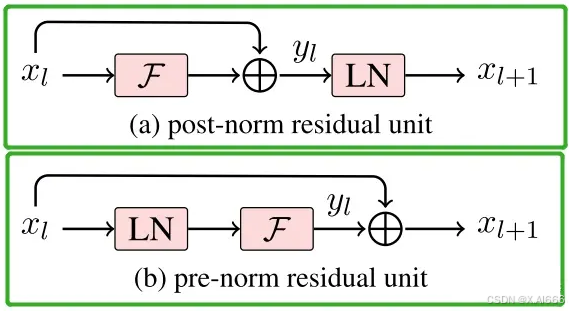
3.Post-LN 和 Pre-LN
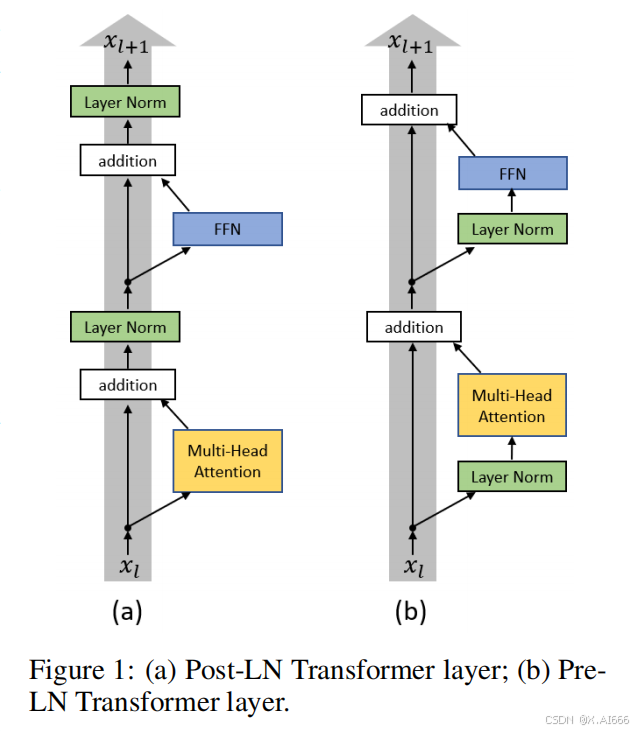
左边是原版Transformer的Post-LN,即将LN放在addition之后;右边是改进之后的Pre-LN,即把LN放在FFN和MHA之前。
一般认为,Post-Norm在残差之后做归一化,对参数正则化的效果更强,进而模型的收敛性也会更好;而Pre-Norm有一部分参数直接加在了后面,没有对这部分参数进行正则化,可以在反向时防止梯度爆炸或者梯度消失,大模型的训练难度大,因而使用Pre-Norm较多。
目前比较明确的结论是:同一设置之下,Pre Norm结构往往更容易训练,但最终效果通常不如Post Norm。Pre Norm更容易训练好理解,因为它的恒等路径更突出,但为什么它效果反而没那么好呢?为什么Pre Norm的效果不如Post Norm?
参考资料: