我们使用Pursuit自动驾驶仪为各种场景设计仿真环境,以便用户可以在模拟环境中直接验证他们的软件,无需现场测试。该环境基于Gazebo引擎。
1. 工作区目录
模拟环境的工作区位于提供的U盘中的~/pursuit_space/sitl_space_pursuit中。用户可以按照用户手册轻松地从U盘启动他们的计算机。
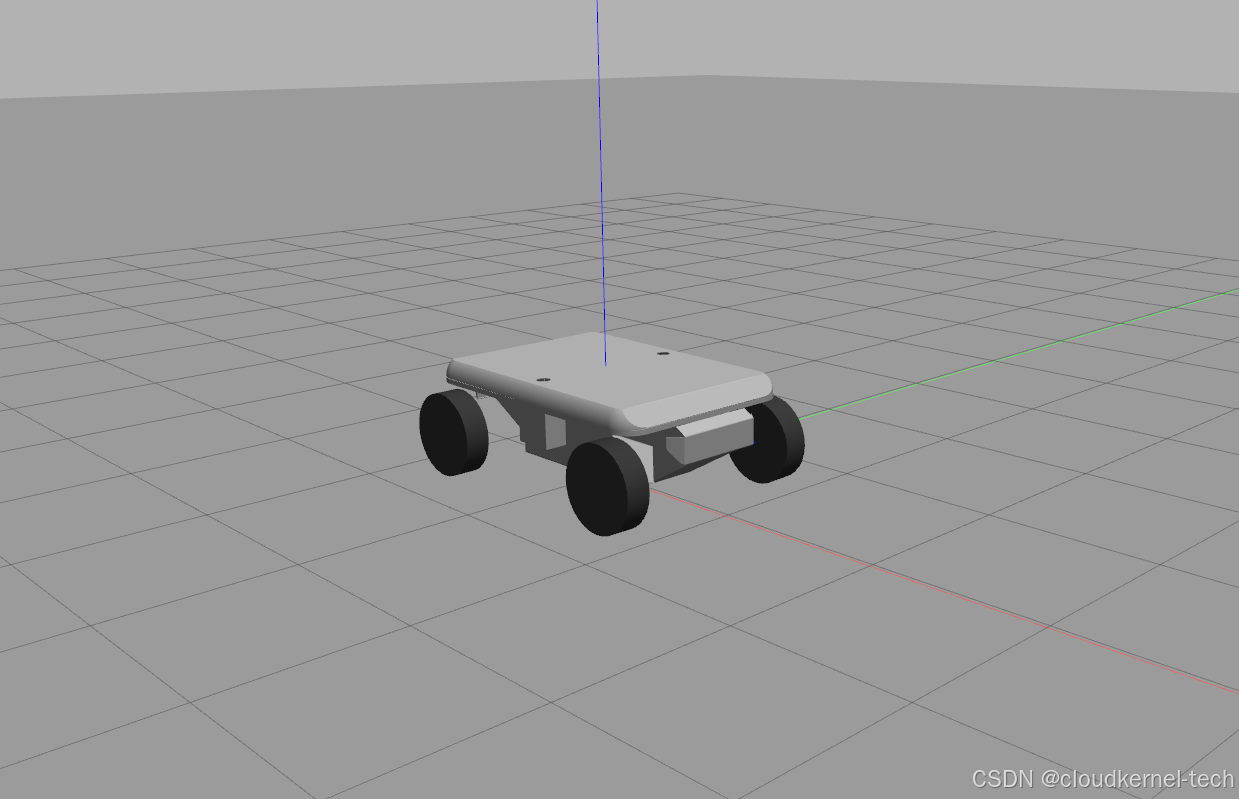
(a) Simulation for a ground vehicle in empty environment
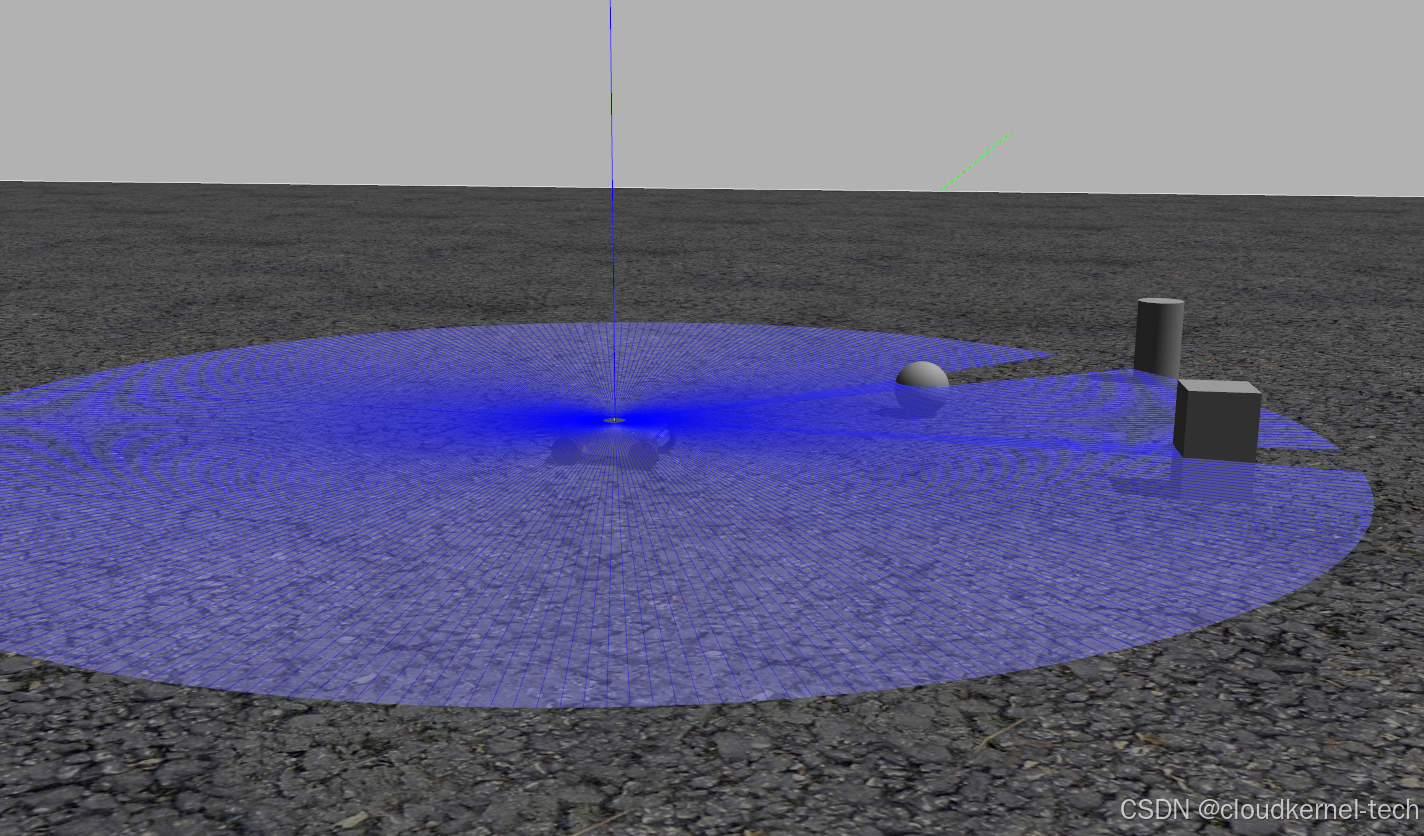
(b) Simulation for a ground vehicle in cluttered environment
2. 如何使用
我们支持以下几种模拟案例。
Case 1: 使用 GPS 导航的空旷环境
这是最简单的模拟情况,可以通过以下方式启动:
bash sitl_run.sh $PWD/bin/px4 none gazebo pursuit_base
然后用户可以在 QGroundcontrol 软件中操作地面车辆。
Case 2: 带 GPS 导航的 Offboard 控制
对于开发 offboard 控制应用程序的用户,模拟也可以启动所有必要的节点,包括mavros,如下所示。请注意,catkinws_nav工作区必须位于同一目录(~/pursuit_space)中,以便setup_pursuit.bash 脚本可以获取正确的 mavros 包。
source setup_pursuit.bash
roslaunch launch/mavros_posix_sitl_pursuit_base.launch
Case 3: 使用 2D 激光雷达在室外有障碍物环境中进行 Offboard 控制
我们还支持对配备 2D 激光雷达的地面车辆进行仿真,这是我们 Model A+ 的主要特点。下面的启动文件可以激活 2D 激光雷达及其对应的 ROS 主题。 用户必须在 QGroundcontrol 中手动将 GND_RMC_OBS_EN 设置为 0 才能启用离线控制。
source setup_pursuit.bash
roslaunch launch/mavros_posix_sitl_pursuit_base_rplidar.launch
更多内容
更多产品信息敬请浏览:
云讷科技官网
Pursuit developer guide