什么是图
1.定义
线性表:一对一
树:多对一
图:多对多(线性表和树是图的特殊情况)
包含:
- 一组顶点:通常用V (Vertex) 表示顶点集合
- 一组边:通常用E (Edge) 表示边的集合
2.抽象数据类型定义
类型名称:图(Graph)
数据对象集:
G
(
V
,
E
)
G(V,E)
G(V,E)由一个非空的有限顶点集合V和一个有限边集合E组成。
操作集:对于任意图
G
∈
G
r
a
p
h
G \in Graph
G∈Graph,以及
v
∈
V
v \in V
v∈V,
e
∈
E
e \in E
e∈E
Graph Create():建立并返回空图;
Graph InsertVertex(Graph G, Vertex v):将v插入G;
Graph InsertEdge(Graph G, Edge e):将e插入G;
void DFS(Graph G, Vertex v):从顶点v出发深度优先遍历图G;
void BFS(Graph G, Vertex v):从顶点v出发宽度优先遍历图G;
void ShortestPath(Graph G, Vertex v, int Dist[]):计算图G中顶点v到任意其他顶点的最短距离;
void MST(Graph G):计算图G的最小生成树;
3.在程序中表示
邻接矩阵 G [ N ] [ N ] G[N][N] G[N][N]——N个顶点从0到N-1编号
G [ i ] [ j ] = { 1 若<vi,vj>是G中的边 0 否则 G[i][j]= \begin{cases} 1& \text{若<vi,vj>是G中的边}\\ 0& \text{否则} \end{cases} G[i][j]={10若<vi,vj>是G中的边否则
对于无向图的存储,怎样可以省一半空间?
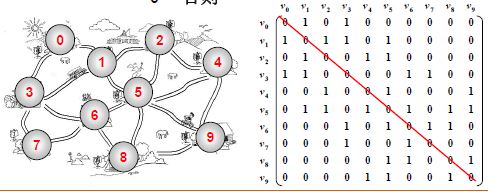
- 用一个长度为N(N+1)/2的1维数组A存储{G00,G10,G11,……,G~n-1 0,…,Gn-1~ n-1},则Gij在A中对应的下标是: ( i ∗ ( i + 1 ) / 2 + j ) ( i*(i+1)/2 + j ) (i∗(i+1)/2+j)
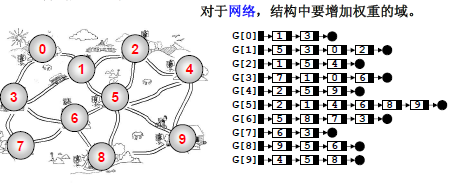
邻接表
G[N]为指针数组,对应矩阵每行一个链表,只存非0元素
图的遍历
1.深度优先搜索(Depth First Search, DFS)
类似于树的先序遍历
void DFS ( Vertex V )
{ visited[ V ] = true;
for ( V 的每个邻接点W )
if ( !visited[ W ] )
DFS( W );
}
2.广度优先搜索(Breadth First Search, BFS)
void BFS ( Vertex V )
{ visited[V] = true;
Enqueue(V, Q); //将图V用队列存储 进
while(!IsEmpty(Q)){
V = Dequeue(Q); //出
for ( V 的每个邻接点W )
if ( !visited[W] ) {
visited[W] = true;
Enqueue(W, Q);
}
}
}
3.连通
连通:如果从V到W存在一条**(无向)路径**,则称VW连通
路径:V到W的路径是一系列顶点{V, v1, v2, …,vn, W}的集合,(任一对相邻的顶点都有图中的边)。
路径的长度是路径中的边数(如果带权,则是所有边的权重和)。
如果V到W之间的所有顶点都不同,则称简单路径
回路:起点等于终点的路径,属于复杂路径
连通图:图中任意两顶点均连通
连通分量:无向图的极大连通子图
- 极大顶点数:再加1个顶点就不连通了
- 极大边数:包含子图中所有顶点相连的所有边
强连通: 有向图中顶点V和W之间存在双向路径,则称V和W是强连通的
强连通图: 有向图中任意两顶点均强连通
强连通分量:有向图的极大强连通子图
最短路径问题
1.定义
在网络中,两个不同顶点的所有路径中,边的权值之和最小的那一条路径,为最短路径
第一个顶点为源点(Source)
最后一个顶点为终点(Destination)
2.问题分类
单源:从某固定源点出发,求其到所有其他顶点的最短路径
- (有向)无权图
- (有向)有权图
多源:求任意两顶点间的最短路径
3.无权图的单源最短路算法
//s到w的最短路径问题
void Unweighted ( Vertex S )
{ Enqueue(S, Q); //将源点压入
while(!IsEmpty(Q)){
V = Dequeue(Q); //当顶点被弹出时,表示v到源点的最短路径已被找到
for ( V 的每个邻接点W )
if ( dist[W]==-1 ) { //初始化距离为-1,表示w未被访问过
dist[W] = dist[V]+1; //w最短距离=v的距离+1
path[W] = V; //s 到 w 的必经顶点就是前一个顶点 v
Enqueue(W, Q);
}
}
}
4.有权图的单源最短路算法
Dijkstra 算法
void Dijkstra( Vertex s )
{ while (1) {
V = 未收录顶点中dist最小者;
if ( 这样的V不存在)
break;
collected[V] = true;
for ( V 的每个邻接点W )
if ( collected[W] == false )
if ( dist[V]+E<V,W> < dist[W] ) {
dist[W] = dist[V] + E<V,W> ;
path[W] = V;
}
}
} /* 不能解决有负边的情况*/
5.多源最短路算法
Floyd 算法
算法描述:
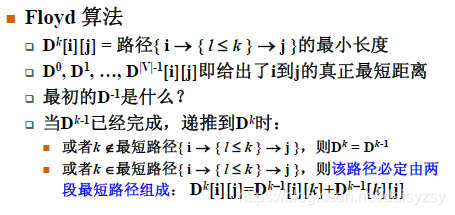
void Floyd()
{ for ( i = 0; i < N; i++ )
for( j = 0; j < N; j++ ) {
D[i][j] = G[i][j];
path[i][j] = -1;
}
for( k = 0; k < N; k++ )
for( i = 0; i < N; i++ )
for( j = 0; j < N; j++ )
if( D[i][k] + D[k][j] < D[i][j] ) {
D[i][j] = D[i][k] + D[k][j];
path[i][j] = k;
}
}
最小生成树问题
1.定义
- 是一棵树
无回路
|V|个顶点一定有|V|-1条边 - 是生成树
包含全部顶点
|V|-1条边都在图里 - 边的权重和最小
tip:向生成树中任加一条边都一定构成回路
最小生成树存在↔ 图连通
2.贪心算法
约束:
- 只能用图里有的边
- 只能正好用掉|V|-1条边
- 不能有回路
Prim算法 — 让一棵小树长大
//tip:初始化
//dist[V] = E(s,V)(已被收录)或正无穷(未被收录); parent[s] = -1(根结点)
void Prim()
{ MST = {s};
while (1) {
V = 未收录顶点中dist最小者;//dist顶点V到生成树(所有收录进去的顶点)的最小距离
if ( 这样的V不存在)
break;
将V收录进MST: dist[V] = 0;
for ( V 的每个邻接点W )
if ( W未被收录)//即dist[W]!=0
if ( E(V,W) < dist[W] ){
dist[W] = E(V,W) ;
parent[W] = V;//每个顶点储存的是父结点的编号
}
}
if ( MST中收的顶点不到|V|个)
Error ( “生成树不存在/图不连通” );
}
时间复杂度:T = O( ∣ V ∣ 2 |V|^2 ∣V∣2) —— 稠密图合算
Kruskal算法— 将森林合并成树
将每个顶点都看成一棵树
void Kruskal ( Graph G )
{ MST = { } ;//收集的是边
while ( MST 中不到|V|-1 条边&& E中还有边) {
从E 中取一条权重最小的边E(v,w) ;//最小堆
将E(v,w)从E 中删除;
if ( E(V,W)不在MST中构成回路)//并查集:每个节点看成树,若两个结点在一棵树里面,则E(V,W)加入必构成回路
将E(V,W) 加入MST;
else
彻底无视E(V,W);
}
if ( MST 中不到|V|-1 条边)
Error ( “生成树不存在” );
}
T = O( |E| log |E| )
拓扑排序
0.背景例题:专业排课
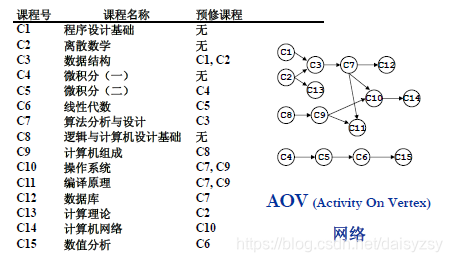
1.定义
拓扑序:图中从V到W有一条有向路径,则V排在W之前.满足此条件的顶点序列称为一个拓扑序
2.AOV网络
AOV(activity on vertex):用图的顶点来代替一项工作的网络,又称顶点活动网络
如果有合理的拓扑序,则必定是有向无环图(否则v必须在v开始前结束矛盾❌)
void TopSort()
{ for ( cnt = 0; cnt < |V|; cnt++ ) {
V = 未输出的入度为0的顶点;
if ( 这样的V不存在) {
Error ( “图中有回路” );
break;
}
输出V,或者记录V的输出序号;
for ( V 的每个邻接点W )
Indegree[W]––;
}
}
随时将入度变为0的顶点放到一个容器里
void TopSort()
{ for ( 图中每个顶点V )
if ( Indegree[V]==0 )
Enqueue( V, Q );
while ( !IsEmpty(Q) ) {
V = Dequeue( Q );
输出V,或者记录V的输出序号; cnt++;
for ( V 的每个邻接点W )
if ( ––Indegree[W]==0 )
Enqueue( W, Q );
}
if ( cnt != |V| )
Error( “图中有回路” );
}
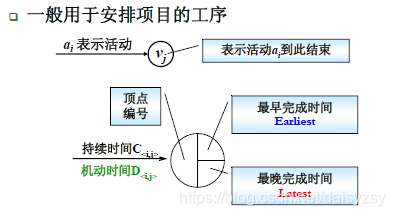
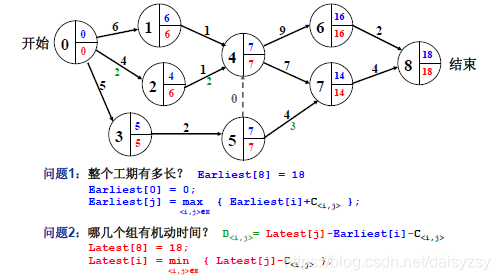
3.AOE网络
AOE(activity on edge):用边来代替一项工作的网络
关键路径问题:由绝对不允许延误的活动组成的路径