一、spi_controller 结构体框图
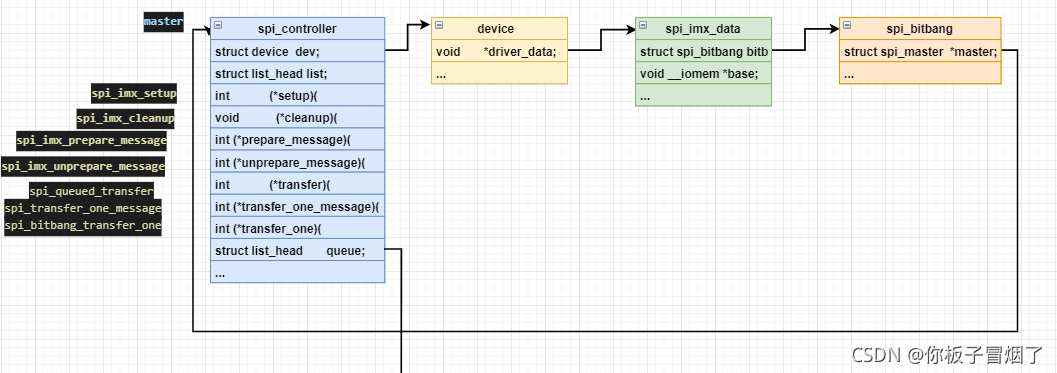
二、spi_register_master() 宏
include/linux/spi/spi.h
- 调用流程
spi_imx_probe
->spi_bitbang_start
->->spi_register_master
#define spi_register_master(_ctlr) spi_register_controller(_ctlr)
spi_register_controller()函数
drivers/spi/spi.c
int spi_register_controller(struct spi_controller *ctlr)
{
struct device *dev = ctlr->dev.parent;
struct boardinfo *bi;
int status = -ENODEV;
int id, first_dynamic;
...
// spi控制器中的device成员设置一个名字
dev_set_name(&ctlr->dev, "spi%u", ctlr->bus_num);
// spi控制器中的device结构体加入到linux设备驱动模型
status = device_add(&ctlr->dev);
...
// 此成员是一个函数指针,此时还未初始化,第一个分支不会执行
if (ctlr->transfer) {
dev_info(dev, "controller is unqueued, this is deprecated\n");
} else if (ctlr->transfer_one || ctlr->transfer_one_message) {
status = spi_controller_initialize_queue(ctlr);// 即将执行
...
}
...
list_add_tail(&ctlr->list, &spi_controller_list);
...
}
spi_controller_initialize_queue()函数
drivers/spi/spi.c
static int spi_controller_initialize_queue(struct spi_controller *ctlr)
{
int ret;
// 初始化一个成员函数指针
ctlr->transfer = spi_queued_transfer;
if (!ctlr->transfer_one_message)
ctlr->transfer_one_message = spi_transfer_one_message;
/* Initialize and start queue */
ret = spi_init_queue(ctlr);
if (ret) {
dev_err(&ctlr->dev, "problem initializing queue\n");
goto err_init_queue;
}
ctlr->queued = true;
ret = spi_start_queue(ctlr);
if (ret) {
dev_err(&ctlr->dev, "problem starting queue\n");
goto err_start_queue;
}
return 0;
err_start_queue:
spi_destroy_queue(ctlr);
err_init_queue:
return ret;
}
spi_init_queue()函数
- 主要内容
初始化内核线程工人
初始化内核具体工作
drivers/spi/spi.c
static int spi_init_queue(struct spi_controller *ctlr)
{
struct sched_param param = { .sched_priority = MAX_RT_PRIO - 1 };
ctlr->running = false;
ctlr->busy = false;
// 初始化一个内核工人
kthread_init_worker(&ctlr->kworker);
// 为worker创建一个内核线程
ctlr->kworker_task = kthread_run(kthread_worker_fn, &ctlr->kworker,
"%s", dev_name(&ctlr->dev));
if (IS_ERR(ctlr->kworker_task)) {
dev_err(&ctlr->dev, "failed to create message pump task\n");
return PTR_ERR(ctlr->kworker_task);
}
// 初始化一个具体的内核工作,参数2就是具体的处理函数
kthread_init_work(&ctlr->pump_messages, spi_pump_messages);
...
return 0;
}
spi_start_queue()函数
启动内核具体工作(之前执行的spi_init_queue初始化worker,创建内核线程,初始化work)
drivers/spi/spi.c
static int spi_start_queue(struct spi_controller *ctlr)
{
unsigned long flags;
spin_lock_irqsave(&ctlr->queue_lock, flags);
if (ctlr->running || ctlr->busy) {
spin_unlock_irqrestore(&ctlr->queue_lock, flags);
return -EBUSY;
}
ctlr->running = true;
ctlr->cur_msg = NULL;
spin_unlock_irqrestore(&ctlr->queue_lock, flags);
// 将work交付给worker来完成
kthread_queue_work(&ctlr->kworker, &ctlr->pump_messages);
return 0;
}
spi_pump_messages()函数
内核工作具体处理函数
drivers/spi/spi.c
static void spi_pump_messages(struct kthread_work *work)
{
struct spi_controller *ctlr =
container_of(work, struct spi_controller, pump_messages);
// 详见下
__spi_pump_messages(ctlr, true);
}
__spi_pump_messages()函数
drivers/spi/spi.c
static void __spi_pump_messages(struct spi_controller *ctlr, bool in_kthread)
{
unsigned long flags;
bool was_busy = false;
int ret;
...
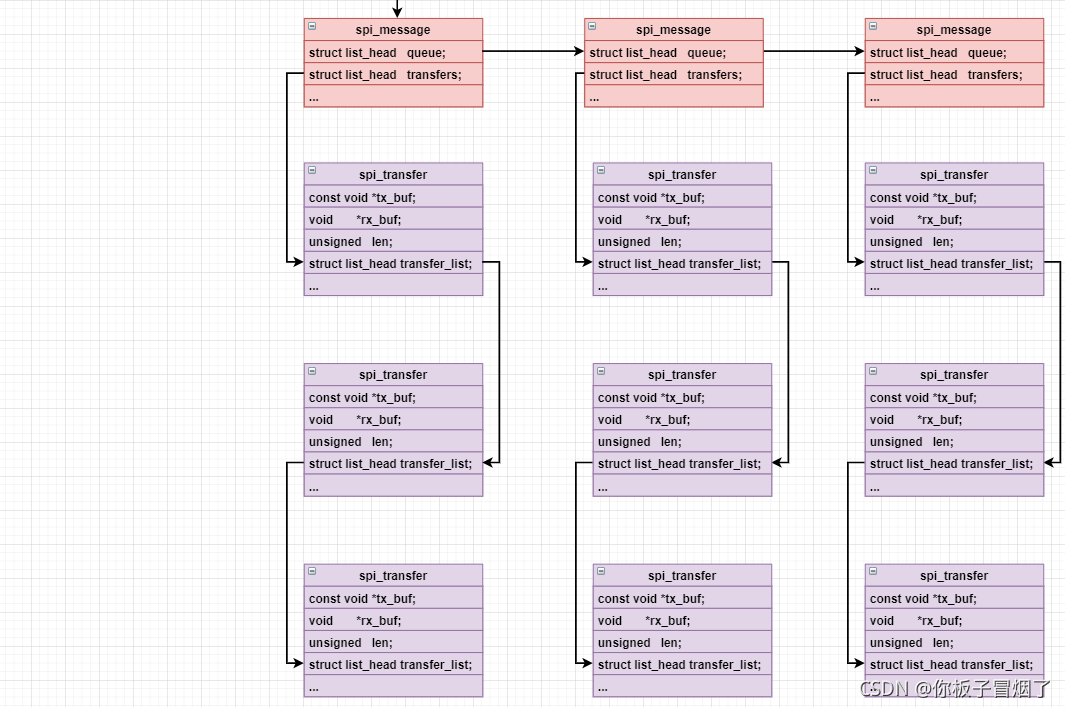
// spi_message结构体,spi_controller->queue链表链接着一系列spi_message
// 获取链表中的第一个spi_message结构体,每次添加时都是添加到链表末尾
ctlr->cur_msg =
list_first_entry(&ctlr->queue, struct spi_message, queue);
// 将第一个spi_message从上面的链表中删除
list_del_init(&ctlr->cur_msg->queue);
...
// 函数指针,前面已经初始化好
if (ctlr->prepare_message) {
ret = ctlr->prepare_message(ctlr, ctlr->cur_msg);
...
ctlr->cur_msg_prepared = true;
}
...
// 重要,发送,就是函数 spi_transfer_one_message
ret = ctlr->transfer_one_message(ctlr, ctlr->cur_msg);
...
}
spi_transfer_one_message()函数
drivers/spi/spi.c
static int spi_transfer_one_message(struct spi_controller *ctlr,
struct spi_message *msg)
{
struct spi_transfer *xfer;
bool keep_cs = false;
int ret = 0;
unsigned long long ms = 1;
struct spi_statistics *statm = &ctlr->statistics;
struct spi_statistics *stats = &msg->spi->statistics;
...
list_for_each_entry(xfer, &msg->transfers, transfer_list) {
...
if (xfer->tx_buf || xfer->rx_buf) {
reinit_completion(&ctlr->xfer_completion);
// 其实就是spi_bitbang_taansfer_one,真正负责spi消息的发送
ret = ctlr->transfer_one(ctlr, msg->spi, xfer);
...
if (ret > 0) {
ret = 0;
ms = 8LL * 1000LL * xfer->len;
do_div(ms, xfer->speed_hz);
ms += ms + 200; /* some tolerance */
if (ms > UINT_MAX)
ms = UINT_MAX;
ms = wait_for_completion_timeout(&ctlr->xfer_completion,
msecs_to_jiffies(ms));
}
}
...
// 详见下
spi_finalize_current_message(ctlr);
...
}
spi_finalize_current_message()函数
drivers/spi/spi.c
void spi_finalize_current_message(struct spi_controller *ctlr)
{
struct spi_message *mesg;
unsigned long flags;
int ret;
...
ctlr->cur_msg = NULL;
ctlr->cur_msg_prepared = false;
// 为内核worker添加一个新的处理工作,即spi_pump_message
kthread_queue_work(&ctlr->kworker, &ctlr->pump_messages);
...
mesg->state = NULL;
// 不为空则唤醒之前阻塞的线程
if (mesg->complete)
mesg->complete(mesg->context);
}
三、spi_sync()函数
同步传输数据
会新创建一个内核线程去传输数据,在传输时会阻塞当前线程,传输线程在传输完会唤醒当前线程。
drivers/spi/spi.c
int spi_sync(struct spi_device *spi, struct spi_message *message)
{
int ret;
// 互斥锁相关
mutex_lock(&spi->controller->bus_lock_mutex);
ret = __spi_sync(spi, message);
mutex_unlock(&spi->controller->bus_lock_mutex);
return ret;
}
__spi_sync()函数
drivers/spi/spi.c
static int __spi_sync(struct spi_device *spi, struct spi_message *message)
{
int status;
struct spi_controller *ctlr = spi->controller;
unsigned long flags;
// 校验spi设备内各种通信的参数
status = __spi_validate(spi, message);
// 不正常直接返回
if (status != 0)
return status;
// 函数指针初始化,会结束下面的阻塞
message->complete = spi_complete;
message->context = &done;
message->spi = spi;
...
// 之前已经初始化,此处相等
if (ctlr->transfer == spi_queued_transfer) {
spin_lock_irqsave(&ctlr->bus_lock_spinlock, flags);
trace_spi_message_submit(message);
// 详见下
status = __spi_queued_transfer(spi, message, false);
spin_unlock_irqrestore(&ctlr->bus_lock_spinlock, flags);
} else {
status = spi_async_locked(spi, message);
}
if (status == 0) {
...
// 会阻塞当前进程或线程
wait_for_completion(&done);
status = message->status;
}
message->context = NULL;
return status;
}
__spi_queued_transfer()函数
drivers/spi/spi.c
static int __spi_queued_transfer(struct spi_device *spi,
struct spi_message *msg,
bool need_pump)
{
struct spi_controller *ctlr = spi->controller;
unsigned long flags;
spin_lock_irqsave(&ctlr->queue_lock, flags);
// 若spi控制器正在被占用,则执行此分支返回
if (!ctlr->running) {
spin_unlock_irqrestore(&ctlr->queue_lock, flags);
return -ESHUTDOWN;
}
msg->actual_length = 0;
msg->status = -EINPROGRESS;
// spi_message 的链表节点链到spi_controller的链表中
list_add_tail(&msg->queue, &ctlr->queue);
if (!ctlr->busy && need_pump)//为内核工人添加一个具体的工作,将work交付给worker来完成
kthread_queue_work(&ctlr->kworker, &ctlr->pump_messages);
spin_unlock_irqrestore(&ctlr->queue_lock, flags);
return 0;
}
四、spi_async()函数
异步传输数据
drivers/spi/spi.c
int spi_async(struct spi_device *spi, struct spi_message *message)
{
...
ret = __spi_async(spi, message);
...
}
__spi_async()函数
drivers/spi/spi.c
static int __spi_async(struct spi_device *spi, struct spi_message *message)
{
struct spi_controller *ctlr = spi->controller;
...
// 函数指针,即 spi_queued_transfer
return ctlr->transfer(spi, message);
}
spi_queued_transfer()函数
drivers/spi/spi.c
static int spi_queued_transfer(struct spi_device *spi, struct spi_message *msg)
{
return __spi_queued_transfer(spi, msg, true);
}
__spi_queued_transfer()函数
drivers/spi/spi.c
static int __spi_queued_transfer(struct spi_device *spi,
struct spi_message *msg,
bool need_pump)
{
struct spi_controller *ctlr = spi->controller;
unsigned long flags;
spin_lock_irqsave(&ctlr->queue_lock, flags);
if (!ctlr->running) {
spin_unlock_irqrestore(&ctlr->queue_lock, flags);
return -ESHUTDOWN;
}
msg->actual_length = 0;
msg->status = -EINPROGRESS;
list_add_tail(&msg->queue, &ctlr->queue);
if (!ctlr->busy && need_pump)
kthread_queue_work(&ctlr->kworker, &ctlr->pump_messages);
spin_unlock_irqrestore(&ctlr->queue_lock, flags);
return 0;
}