文章目录
前言
提示:这里可以添加本文要记录的大概内容:
项目需要:
提示:以下是本篇文章正文内容,下面案例可供参考
一、正交编码器是什么?

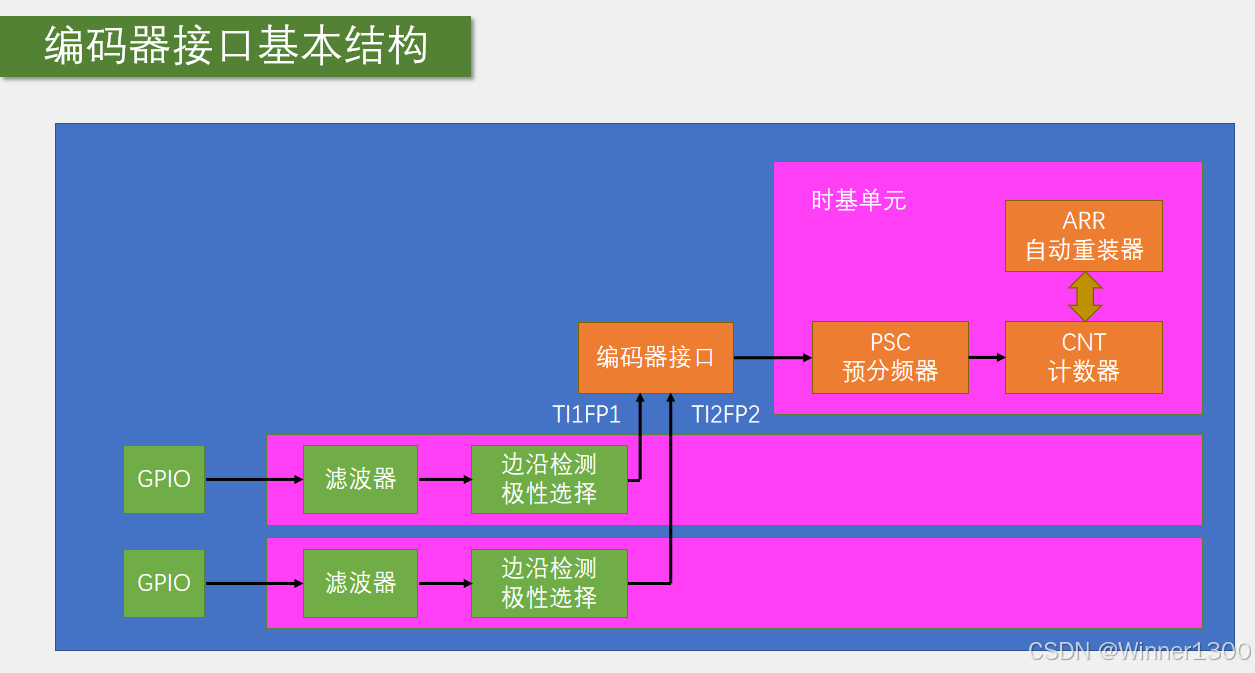
在这里插入图片描述
二、使用步骤
2.1开启时钟
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //开启TIM3的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
2.2配置编码器引脚 TIM3 CH1(PA6) CH2 (PA7)上拉输入
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
2.3.初始化编码器时基
代码如下(示例):
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM3的时基单元
2.4 初始化编码器输入
代码如下(示例):
/*输入捕获初始化*/
TIM_ICInitTypeDef TIM_ICInitStructure; //定义结构体变量
TIM_ICStructInit(&TIM_ICInitStructure); //结构体初始化,若结构体没有完整赋值
//则最好执行此函数,给结构体所有成员都赋一个默认值
//避免结构体初值不确定的问题
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择配置定时器通道1
TIM_ICInitStructure.TIM_ICFilter = 0; //输入滤波器参数,可以过滤信号抖动
TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; //选择配置定时器通道2
TIM_ICInitStructure.TIM_ICFilter = 0; //输入滤波器参数,可以过滤信号抖动
TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道
2.5 配置编码器接口
/*编码器接口配置*/
TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
//配置编码器模式以及两个输入通道是否反相
//注意此时参数的Rising和Falling已经不代表上升沿和下降沿了,而是代表是否反相
//此函数必须在输入捕获初始化之后进行,否则输入捕获的配置会覆盖此函数的部分配置
2.6 开启定时器
/*TIM使能*/
TIM_Cmd(TIM3, ENABLE); //使能TIM3,定时器开始运行
2.7获取编码器数据
/**
* 函 数:获取编码器的增量值
* 参 数:无
* 返 回 值:自上此调用此函数后,编码器的增量值
*/
int16_t Encoder_Get(void)
{
/*使用Temp变量作为中继,目的是返回CNT后将其清零*/
int16_t Temp;
Temp = TIM_GetCounter(TIM3);
TIM_SetCounter(TIM3, 0);
return Temp;
}
三、参考程序
#include "stm32f10x.h"
#include "stdio.h"
//全局
GPIO_InitTypeDef GPIO_InitStruct;
int x;
/**
* 函 数:编码器初始化
* 参 数:无
* 返 回 值:无
*/
void Encoder_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //开启TIM3的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA6和PA7引脚初始化为上拉输入
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM3的时基单元
/*输入捕获初始化*/
TIM_ICInitTypeDef TIM_ICInitStructure; //定义结构体变量
TIM_ICStructInit(&TIM_ICInitStructure); //结构体初始化,若结构体没有完整赋值
//则最好执行此函数,给结构体所有成员都赋一个默认值
//避免结构体初值不确定的问题
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择配置定时器通道1
TIM_ICInitStructure.TIM_ICFilter = 0; //输入滤波器参数,可以过滤信号抖动
TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; //选择配置定时器通道2
TIM_ICInitStructure.TIM_ICFilter = 0; //输入滤波器参数,可以过滤信号抖动
TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道
/*编码器接口配置*/
TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
//配置编码器模式以及两个输入通道是否反相
//注意此时参数的Rising和Falling已经不代表上升沿和下降沿了,而是代表是否反相
//此函数必须在输入捕获初始化之后进行,否则输入捕获的配置会覆盖此函数的部分配置
/*TIM使能*/
TIM_Cmd(TIM3, ENABLE); //使能TIM3,定时器开始运行
}
/**
* 函 数:获取编码器的增量值
* 参 数:无
* 返 回 值:自上此调用此函数后,编码器的增量值
*/
int16_t Encoder_Get(void)
{
/*使用Temp变量作为中继,目的是返回CNT后将其清零*/
int16_t Temp;
Temp = TIM_GetCounter(TIM3);
TIM_SetCounter(TIM3, 0);
return Temp;
}
void usart1_init()
{
//PA9 TX PA10 RX USART1
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1, ENABLE);//1.开时钟
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9;//发送
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10;//接收
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
USART_InitStruct.USART_BaudRate=115200;
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;
USART_InitStruct.USART_Parity=USART_Parity_No;
USART_InitStruct.USART_StopBits=USART_StopBits_1;
USART_InitStruct.USART_WordLength=USART_WordLength_8b;
USART_Init(USART1, &USART_InitStruct);//2.初始化串口
USART_Cmd(USART1, ENABLE);//3.是能串口
USART_SendData(USART1, '4');
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE)!=1);
USART_SendData(USART1, '1');
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE)!=1);
USART_SendData(USART1, 0X41);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE)!=1);
USART_SendData(USART1, 41);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE)!=1);
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE );// 4.接受完成中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 5.配置中断分组
NVIC_InitStruct.NVIC_IRQChannel=USART1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority=0;
NVIC_Init(&NVIC_InitStruct);//配置中断优先级
}
int fputc(int ch,FILE *f)
{
USART_SendData(USART1, (u8)ch);
while(!USART_GetFlagStatus(USART1, USART_FLAG_TXE));
return ch;
}
void delay(u16 ms)
{
u16 i,j;
for(i=0;i<ms;i++)
for(j=0;j<1000;j++);
}
int main()
{
//局部
// 库函数开启GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStruct.GPIO_Pin= GPIO_Pin_0|GPIO_Pin_1;
GPIO_InitStruct.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStruct); //&x
GPIO_InitStruct.GPIO_Pin= GPIO_Pin_2|GPIO_Pin_3;
GPIO_InitStruct.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOB, &GPIO_InitStruct); //&x
usart1_init();
Encoder_Init();
u16 Speed=0;
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
while(1)
{
GPIO_SetBits(GPIOA, GPIO_Pin_0);
//GPIO_ResetBits(GPIOA, GPIO_Pin_0);
u8 k=0;
for(k=0;k<20;k++){
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
delay(100);
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
delay(100);
GPIO_SetBits(GPIOA,GPIO_Pin_0);
GPIO_SetBits(GPIOA,GPIO_Pin_0);
delay(100);
GPIO_SetBits(GPIOA,GPIO_Pin_1);
GPIO_SetBits(GPIOA,GPIO_Pin_1);
delay(100);
}
Speed = Encoder_Get(); //每隔固定时间段读取一次编码器计数增量值,即为速度值
printf("测到的脉冲是=%d \r\n",Speed);
}
}
四、测试结果
4.1测试方法
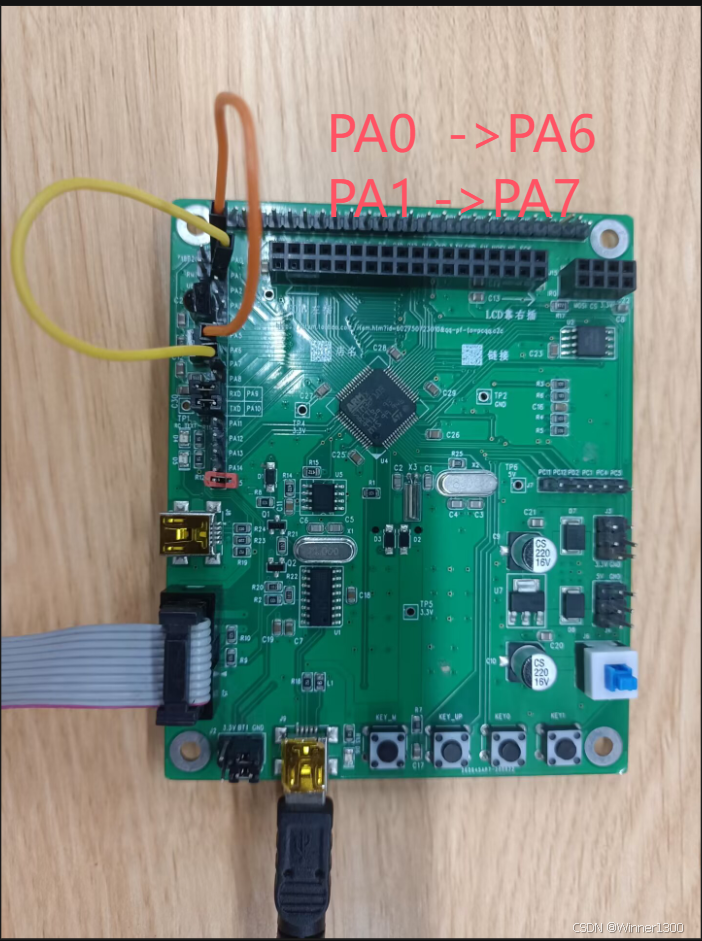
将正交编码编码的信号输入STM32 PA6 PA7引脚
因为没有编码器所以用PA0 和PA1模拟输出正交编码的PWM波形
如果有编码器器可以直接接入 PA6 PA7
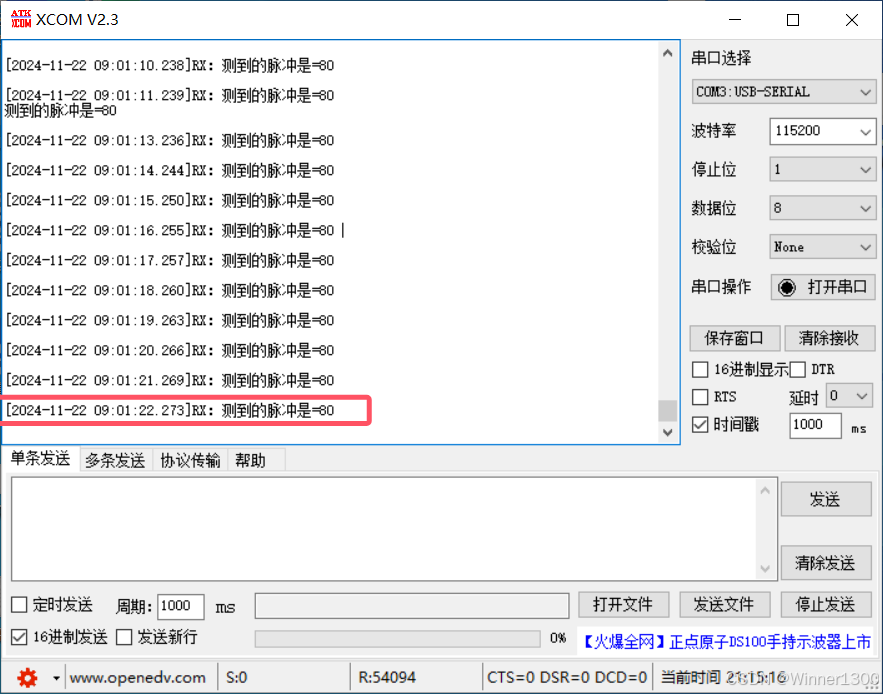
4.2串口输出结果
结果分析:
这里对输入的波形滤波
PA0 PA1 高低电平输出
循环20次
一次PA0循环输出1次上升沿,1次下降沿
一次PA1循环输出1次上升沿,1次下降沿
20*(1+1+1+1)=80
所以计数器的次数是0
接线
总结
学习使人快乐!
音乐使人愉悦!
日积月累使人充实和自信!