提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
一、什么是马尔科夫决策模型
马尔科夫链是由俄罗斯数学家安德烈・马尔科夫(Andrey Markov)在 20 世纪初提出的。马尔科夫在研究随机过程时发现,某些随机过程具有一种特殊的性质,即未来的状态只取决于当前的状态,而与过去的历史无关,这就是著名的马尔科夫性质。
马尔科夫决策模型(Markov Decision Process,MDP)是一种用于在不确定性环境下进行决策的数学框架,
二、马尔科夫决策的原理
马尔科夫决策的核心公式是贝尔曼方程,其原理是基于马尔科夫性质构建动态决策框架,通过计算状态价值函数来确定最优策略,以实现长期累计奖励的最大化。以下是具体内容:
核心公式:贝尔曼方程
V(s) = max_a∈A ∑_s’∈S P_ss’^a [R(s,a,s’) + γV(s’)]
其中:V (s) 表示状态 s 的价值函数,它代表从状态 s 出发,按照最优策略运行所能获得的长期累计奖励的期望。
a 是一个动作,A 是所有可能的动作的集合,即动作空间。
s’ 是系统在下一个时间步可能转移到的状态,S 是所有可能的状态的集合,即状态空间。
P_ss’^a 表示在当前状态 s 采取动作 a 的情况下,转移到下一个状态 s’ 的概率,即状态转移概率。
R (s,a,s’) 是奖励函数,表示在状态 s 采取动作 a 转移到状态 s’ 时所获得的奖励值。
γ 是折扣因子,是一个介于 0 和 1 之间的数,用于权衡未来奖励和当前奖励的重要性。
马尔科夫性质:马尔科夫决策基于马尔科夫性质,即系统在未来时刻的状态仅取决于当前时刻的状态和所采取的动作,与过去的历史状态无关。用数学公式表示为:P (S_(t + 1)|S_t,A_t,S_(t - 1),A_(t - 1),…) = P (S_(t + 1)|S_t,A_t)。这一性质大大简化了对复杂系统的建模和分析,使得我们可以专注于当前状态和动作对未来状态的影响。
三、主要组成部分
1.状态空间
系统所有可能处于的状态的集合,如机器人的不同位置、库存的不同水平等。不同的应用场景有不同的状态定义,它确定了模型中所有可能出现的情况。
动作空间:在每个状态下可以采取的动作的集合,例如机器人的移动方向、库存管理中的补货策略等。动作空间定义了决策者在每个状态下能够采取的行动,这些行动会影响系统的状态转移和最终的奖励。
2.状态转移概率
描述了在特定状态下采取特定动作后,系统转移到其他各个状态的可能性。它是基于历史数据或对系统的理解而确定的,用于计算系统在不同决策下的状态变化情况。
3.奖励函数
用于衡量系统在不同状态转移和动作下的收益或成本。通过奖励机制,模型可以引导智能体选择能够获得更高累计奖励的动作,以实现目标,如最大化利润、最小化成本等。
4.折扣因子
随着时间步的推移,未来的奖励在当前决策中的重要性会逐渐降低,折扣因子就是用来体现这种时间价值的衰减。它使得模型更加关注近期的收益和决策效果,避免无限期地考虑未来奖励。
5.决策过程与目标
在每个时间步 t,智能体处于当前状态 S_t,根据某种策略 π 选择一个动作 A_t。策略 π 是一个从状态到动作的映射,表示在不同状态下应采取的动作。然后系统根据状态转移概率 P_ss’^a 转移到下一个状态 S_(t + 1),并获得相应的奖励 R_(t + 1)。智能体的目标是通过选择合适的策略 π,最大化长期累计奖励的期望,即 E [∑_(t = 0)^∞ γ^tR_(t + 1)]。
6.求解最优策略
通过不断迭代贝尔曼方程来计算每个状态的价值函数 V (s)。在每次迭代中,对于每个状态 s,计算在不同动作 a 下的期望价值,即 ∑_s’∈S P_ss’^a [R (s,a,s’) + γV (s’)],然后选择使期望价值最大的动作作为当前状态的最优动作,更新价值函数。经过多次迭代后,价值函数收敛,此时确定的动作策略即为最优策略。
四、马尔科夫决策的案例
1.案例背景
假设一家电子产品零售商需要管理其智能手机的库存。市场需求存在不确定性,但可以分为高需求、中需求和低需求三种状态。零售商可以采取三种行动:大量补货、适量补货和不补货。
2.定义状态空间
状态空间 S = {高需求状态,中需求状态,低需求状态}。
3.定义动作空间
动作空间 A = {大量补货,适量补货,不补货}。
4.定义状态转移概率
假设根据历史数据估计出以下状态转移概率:
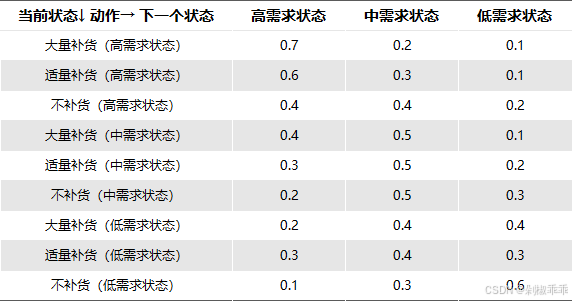
如果当前处于高需求状态:采取大量补货后,有 70% 的概率保持高需求状态,20% 的概率变为中需求状态,10% 的概率变为低需求状态。采取适量补货后,有 60% 的概率保持高需求状态,30% 的概率变为中需求状态,10% 的概率变为低需求状态。采取不补货后,有 40% 的概率保持高需求状态,40% 的概率变为中需求状态,20% 的概率变为低需求状态。
如果当前处于中需求状态:采取大量补货后,有 40% 的概率变为高需求状态,50% 的概率保持中需求状态,10% 的概率变为低需求状态。
采取适量补货后,有 30% 的概率变为高需求状态,50% 的概率保持中需求状态,20% 的概率变为低需求状态。采取不补货后,有 20% 的概率变为高需求状态,50% 的概率保持中需求状态,30% 的概率变为低需求状态。
如果当前处于低需求状态:采取大量补货后,有 20% 的概率变为高需求状态,40% 的概率变为中需求状态,40% 的概率保持低需求状态。采取适量补货后,有 30% 的概率变为高需求状态,40% 的概率变为中需求状态,30% 的概率保持低需求状态。采取不补货后,有 10% 的概率变为高需求状态,30% 的概率变为中需求状态,60% 的概率保持低需求状态。
用矩阵形式表示状态转移概率 P_ss’^a 如下:
5.定义奖励函数
奖励函数 R (s, a, s’) 表示在状态 s 采取动作 a 转移到状态 s’ 所获得的奖励值,这里奖励值以利润来衡量。假设:
如果当前处于高需求状态:采取大量补货,每卖出一部手机获得利润 100 元,但如果有剩余库存,每部手机存储成本为 10 元。采取适量补货,每卖出一部手机获得利润 90 元,剩余库存存储成本为 8 元。采取不补货,每卖出一部手机获得利润 80 元,但可能因缺货损失一些潜在利润。
如果当前处于中需求状态:采取大量补货,每卖出一部手机获得利润 80 元,剩余库存存储成本为 12 元。采取适量补货,每卖出一部手机获得利润 70 元,剩余库存存储成本为 10 元。采取不补货,每卖出一部手机获得利润 60 元,但可能因缺货损失一些潜在利润。
如果当前处于低需求状态:采取大量补货,每卖出一部手机获得利润 60 元,剩余库存存储成本为 15 元。采取适量补货,每卖出一部手机获得利润 50 元,剩余库存存储成本为 12 元。
采取不补货,每卖出一部手机获得利润 40 元,但可能因缺货损失一些潜在利润。
用矩阵形式表示奖励函数如下:

6.定义折扣因子
设定折扣因子 γ = 0.9,表示未来奖励在当前决策中的重要性权重。
7.求解最优策略
首先计算每个状态的价值函数 V (s),通过不断迭代贝尔曼方程:
V (s) = max_a∈A ∑_s’∈S P_ss’^a [R (s, a, s’) + γV (s’)]
假设初始时每个状态的价值函数都为 0,经过多次迭代后,得到以下近似的价值函数:
V (高需求状态) ≈ 某个具体数值 V (中需求状态) ≈ 某个具体数值
V (低需求状态) ≈ 某个具体数值
然后根据价值函数确定最优策略:
在高需求状态时,计算采取不同动作后的期望收益,选择期望收益最高的动作作为最优动作。
在中需求状态和低需求状态时,同样进行类似计算,确定最优动作。
8.求解决策过程
假设当前处于中需求状态,根据上述最优策略确定采取的动作(比如适量补货)。然后根据状态转移概率,系统可能转移到高需求状态、中需求状态或低需求状态中的一种,并获得相应的奖励。接着,根据新的状态和最优策略进行下一轮决策。
五、代码实现
import numpy as np
# 状态空间
states = ['高需求状态', '中需求状态', '低需求状态']
# 动作空间
actions = ['大量补货', '适量补货', '不补货']
# 状态转移概率矩阵
transition_probabilities = np.array([
[0.7, 0.2, 0.1],
[0.6, 0.3, 0.1],
[0.4, 0.4, 0.2],
[0.4, 0.5, 0.1],
[0.3, 0.5, 0.2],
[0.2, 0.5, 0.3],
[0.2, 0.4, 0.4],
[0.3, 0.4, 0.3],
[0.1, 0.3, 0.6]
]).reshape(3, 3, 3)
# 奖励函数(假设示例值,实际需根据具体业务计算)
def reward_function(state, action, next_state):
if state == '高需求状态':
if action == '大量补货':
return 100 if next_state == '高需求状态' else -10
elif action == '适量补货':
return 90 if next_state == '高需求状态' else -8
else:
return 80 if next_state == '高需求状态' else -5
elif state == '中需求状态':
if action == '大量补货':
return 80 if next_state == '高需求状态' else -12
elif action == '适量补货':
return 70 if next_state == '高需求状态' else -10
else:
return 60 if next_state == '高需求状态' else -7
else:
if action == '大量补货':
return 60 if next_state == '高需求状态' else -15
elif action == '适量补货':
return 50 if next_state == '高需求状态' else -12
else:
return 40 if next_state == '高需求状态' else -10
# 折扣因子
gamma = 0.9
# 初始化价值函数
values = np.zeros(len(states))
# 迭代更新价值函数
for _ in range(100):
new_values = np.zeros(len(states))
for s in range(len(states)):
max_value = float('-inf')
for a in range(len(actions)):
value = 0
for s_next in range(len(states)):
value += transition_probabilities[s][a][s_next] * (reward_function(states[s], actions[a], states[s_next]) + gamma * values[s_next])
max_value = max(max_value, value)
new_values[s] = max_value
values = new_values
# 根据价值函数确定最优策略
optimal_policy = [None] * len(states)
for s in range(len(states)):
max_value = float('-inf')
best_action = None
for a in range(len(actions)):
value = 0
for s_next in range(len(states)):
value += transition_probabilities[s][a][s_next] * (reward_function(states[s], actions[a], states[s_next]) + gamma * values[s_next])
if value > max_value:
max_value = value
best_action = actions[a]
optimal_policy[s] = best_action
print("价值函数:", values)
print("最优策略:", optimal_policy)
总结
马尔科夫决策模型通过考虑各种因素的影响,可以为在不确定环境下的决策提供了一种有效的方法,帮助决策者找到最优策略,以在长期运行中获得最大的收益或达到其他目标。