1.环境配置
CMakeLists.txt中 C++ 使用 14、opencv使用4
2.构建项目
- 克隆代码库:
- 在终端中执行以下命令克隆项目:
git clone https://github.com/rpng/R-VIO2.git
- 在终端中执行以下命令克隆项目:
- 编译项目:
- 使用
catkin_make编译项目。在项目目录下执行以下命令:cd <your_catkin_ws> # 替换为你的 catkin 工作空间路径 catkin_make R-VIO2提供两个执行文件:rvio2_mono:用于实时运行 ROS bag 数据。rvio2_mono_eval:用于评估目的,预先加载 ROS bag 并将其作为 txt 文件读取。
- 使用
3. 运行 VIO 模式
R-VIO2 可以在 VIO 模式下运行,这种模式只估计导航过程中相对位姿。
-
启动 ROS 核心服务:
在终端中执行以下命令启动 ROS 核心服务:roscore -
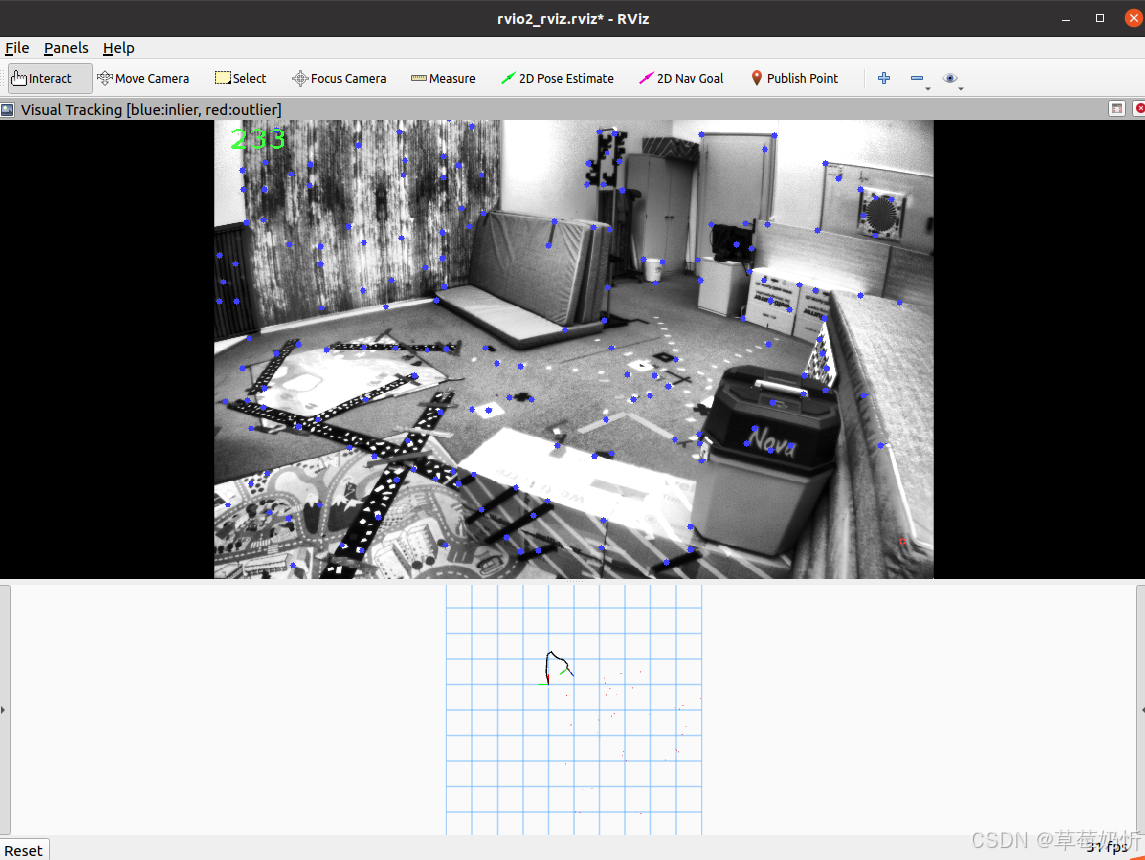
启动 Rviz 可视化工具:
在另一个终端中,执行以下命令启动 Rviz 可视化工具,并打开配置文件:rviz -d src/R-VIO2/config/rvio2_rviz.rviz在 Rviz 中加载项目中的配置文件(如
rvio2_rviz.rviz),用于可视化输出结果。
这里只用Rviz时,不能可视化。 -
运行 rosbag 数据集:
在第三个终端中,使用以下命令播放 ROS bag 数据(例如 EuRoC 数据集):rosbag play --pause V1_01_easy.bag可以根据需要跳过数据的开头部分,以避免由于初始状态不稳定而影响结果。
-
启动 R-VIO2:
在第四个终端中,使用以下命令启动R-VIO2:roslaunch rvio2 euroc.launch