深度寻路算法思想:
- 规定试探方向 : 上右下左 上左下右
- 实时记录每个点,当前试探方向
- 并且确定每个点是否已经走过
- 回退:
- 每走一步,存储一下当前点的位置(利用栈结构)
- 等到需要回退的时候,出栈,返回当前栈顶元素,让当前点返回到上一个
- 遇到终点,栈结构存储从开始到终点的路径,如果整个栈为空,说明没有终点
1. 深度寻路语言描述
如图:我们在起点(2,3)的位置,要到达终点为(9,7)的位置:紫色为墙壁法无移动,白色为路径
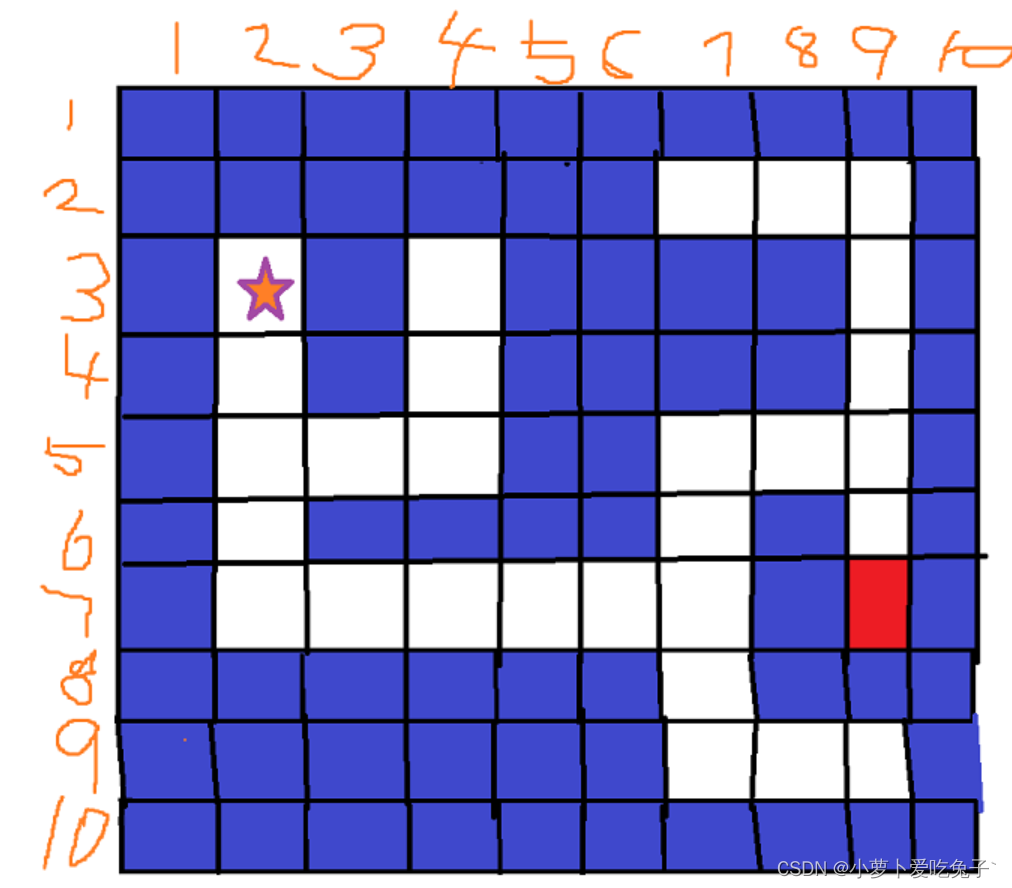
已经走过的路会被标记为true,表示已走过,不可以重复再走一遍;没有走的为false,表示可以行走
起始点为(2,3);试探点(下一步将要移动的一个临时点)为(2,3);
试探方向 : 顺时针 上右下左(优先按照顺序通行)
- 首先我们在起点试探上方向,为墙壁,所以我们无法移动。我们接着试探右方向,发现也为墙壁,无法移动。接着试探下方向,可以移动,则当前位置移动到(2,4)的位置。
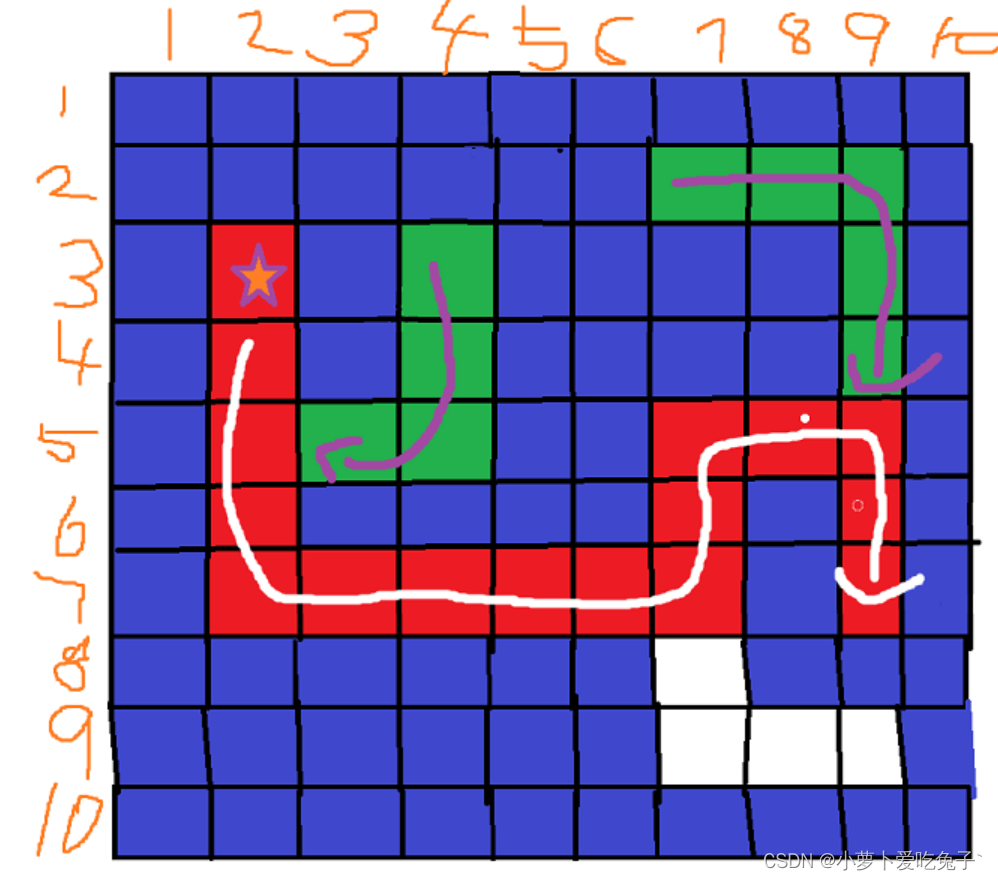
- 接着在新的位置在重新开始上右下左的方向遍历,可以得到,继续往下移动,到达(2,5)
- 接着往右移动,往右移动,往右移动,往上移动,往上移动,注意:此时到达(4,3) 的位置,但是!!!这个地方是一个死胡同。请注意我们无法实现自主回退,因为我们无法重新行走已经走过的路径!!
- 那这样要怎么办呢,我们用到了***栈回退的功能***,我们用一个栈来存储每一步的x,y坐标,栈顶元素即为当前 的位置,我们到达死胡同时,会执行出栈操作,因为出栈会实现回退,这样我们的位置就回退到了(4,4)
- 注意我们此时依旧是死胡同,因为只有一条路,走过的路不能重复走,所以我们必须继续栈回退,直到我们退到了一个可以继续走的位置:(2,5)(是一个十字路口),第一次我们往右走,走不通,所以这次我们会跳过右的路径,进行往下的移动,移动到(2,6),接着往下,往右,往右… 一个重复的步骤
总结: 红色的路径表示最终所走的路径,绿色路径表示走到了死胡同进行栈回退的路径;
在多个方向均可以移动的情况下,按 上 右 下 左优先通行,
2. 栈结构的准备
我们需要一个栈来存储所经过路径,这里采用了顺序栈的形式,当然也可以采用链式栈的形式,栈结构必须要有 入栈 出栈 获取栈顶元素 判断栈是否为空等操作
关于栈和队列的详细操作,请看我这篇博文
#pragma once
#include <iostream>
#include <string.h>
#include <stdlib.h>
#include <malloc.h>
#include <string.h>
using namespace std;
template<class T>
class MyVector
{
T* pArr; //保存顺序表的首地址
size_t len; //顺序表元素个数
size_t capacity; //当前容量
public:
MyVector();
~MyVector();
//入栈
void push(const T& data);
//出栈
void pop()
{
if (len > 0)
{
len--;
}
}
//获取栈顶元素
T GetTop()
{
return pArr[len-1];
}
//判断是否为空
bool isempty()
{
return len == 0;
}
};
template<class T>
MyVector<T>::MyVector(){
pArr = NULL;
capacity = len = 0;
}
template<class T>
MyVector<T>::~MyVector(){
if (pArr){
delete[] pArr;
}
pArr = NULL;
capacity = len = 0;
}
//入栈
template<class T>
void MyVector<T>::push(const T& data){
//1.开辟新的内存区域
if (pArr == NULL)
{
//1. 开辟新的空间
T* pNew = (T*)malloc(sizeof(T) * (len + 1));
//2. 原来的内存指向新的开辟的内存
pArr = pNew;
//3. 插入数据
pArr[len++] = data;
}
else
{
//1.为后面的开辟新的内存
T* pNew = (T*)malloc(sizeof(T) * (len + 1));
//2.将原有的内存数据的元素拷贝到新的内存里
memcpy(pNew, pArr, sizeof(T) * len);
//3.释放原有的内存空间
free(pArr);
//4.原来的内存指向新的开辟的内存
pArr = pNew;
//5.插入数据
pArr[len++] = data;
}
return;
}
3. 深度寻路算法的实现:
地图:
#define ROW 10
#define COL 10
int map[ROW][COL] =
{
{1,1,1,1,1,1,1,1,1,1},
{1,0,1,0,1,1,1,1,1,1},
{1,0,1,0,0,0,0,0,1,1},
{1,0,1,0,1,1,1,0,1,1},
{1,0,0,0,1,1,1,1,1,1},
{1,1,1,0,0,0,1,1,1,1},
{1,1,1,0,1,1,0,0,0,1},
{1,1,1,0,1,0,0,1,1,1},
{1,1,1,0,0,0,1,1,1,1},
{1,1,1,1,1,1,1,1,1,1},
};
辅助地图:
enum Direct
{
p_up,
p_right,
p_down,
p_left,
};
struct pathNode
{
int dir; //方向 0
bool isFind; //是否走过 false 0没有走过
};
struct Mypoint
{
int row;
int col;
//重载==运算符,为接下来的判断是否到达终点做准备
bool operator==(const Mypoint& pos)
{
if (row == pos.row && col == pos.col)
{
return true;
}
return false;
}
};
辅助地图有一个结构体,记录每个位置的初始方向与是否走过,我们可以设置一个方向枚举,上右下左分别表示0 1 2 3 ;是否走过的标记设置为false 即0;那么我们就可以迅速的给这个辅助地图赋值,即:
//辅助地图
pathNode pathMap[ROW][COL] = { 0 };
Mypoint结构体记录每个点的位置即 row和col x和y的坐标
//起始点坐标
Mypoint Begpos = { 1,1 };
//终点坐标
Mypoint Endpos = { 6,8 };
//当前点
Mypoint Curpos = Begpos;
//试探点
Mypoint Researchpos;
起点坐标入栈
//起点坐标入栈
MyVector<Mypoint> pStack;
pStack.push(Curpos);
//起点位置设置为true 已经走过
pathMap[Curpos.row][Curpos.col].isFind = true;
寻路过程:来一个循环:由当前点的方向来决定他往哪里走;如果往一个方向走,则试探点先走,更新当前点方向(因为无论如何你的方向都要依次增加);判断试探点的信息能否走,如果为false并且为0;说明能走,就走,更新当前点的位置为试探点;当前点位置入栈;记录当前点坐标为true,表示已经走过,下次不能走,只能通过退栈的形式返回
- 注意:上右下这第三个的case语句内容基本是一致的,只有试探点的坐标更新不同,理解了一个则剩下的很容易理解
- 当到达最后一个方向,即左时,如果还不能走,说明死胡同,则需要执行退栈操作,让当前点位置回退到上一个位置,直到到达了一个可以重复走的位置,注意执行顺序:先出栈再获取栈顶元素
- 最后,如果终点的坐标等于当前点的坐标,说明到达终点,记得重载==运算符
- 如果最后栈为空,说明路径没有终点,因为到达死胡同会一直退栈,如果退栈到栈为空,说明整条路没有可以走的路了,则没有终点
while (1)
{
//试探点重新更新
Researchpos = Curpos;
switch (pathMap[Curpos.row][Curpos.col].dir)
{
case p_up:
//试探点的坐标更新
Researchpos.row--;
//无论是否能走,它的方向肯定要改变
pathMap[Curpos.row][Curpos.col].dir++;
if (pathMap[Researchpos.row][Researchpos.col].isFind == false &&
map[Researchpos.row][Researchpos.col] == 0)
{
//能走 就走
Curpos = Researchpos;
//当前点位置入栈
pStack.push(Curpos);
//当前点标记已经走过
pathMap[Curpos.row][Curpos.col].isFind = true;
}
break;
case p_right:
//试探点的坐标更新
Researchpos.col++;
//无论是否能走,它的方向肯定要改变
pathMap[Curpos.row][Curpos.col].dir++;
if (pathMap[Researchpos.row][Researchpos.col].isFind == false &&
map[Researchpos.row][Researchpos.col] == 0)
{
//能走 就走
Curpos = Researchpos;
//当前点位置入栈
pStack.push(Curpos);
//当前点标记已经走过
pathMap[Curpos.row][Curpos.col].isFind = true;
}
break;
case p_down:
//试探点的坐标更新
Researchpos.row++;
//无论是否能走,它的方向肯定要改变
pathMap[Curpos.row][Curpos.col].dir++;
if (pathMap[Researchpos.row][Researchpos.col].isFind == false &&
map[Researchpos.row][Researchpos.col] == 0)
{
//能走 就走
Curpos = Researchpos;
//当前点位置入栈
pStack.push(Curpos);
//当前点标记已经走过
pathMap[Curpos.row][Curpos.col].isFind = true;
}
break;
case p_left:
//试探点的坐标更新
Researchpos.col--;
无论是否能走,它的方向肯定要改变
//pathMap[Curpos.row][Curpos.col].dir++;
if (pathMap[Researchpos.row][Researchpos.col].isFind == false &&
map[Researchpos.row][Researchpos.col] == 0)
{
//能走 就走
Curpos = Researchpos;
//当前点位置入栈
pStack.push(Curpos);
//当前点标记已经走过
pathMap[Curpos.row][Curpos.col].isFind = true;
}
else //死胡同,执行回退操作
{
//到达最后一个方向还是没有出去,说明是死胡同
//执行出栈操作
pStack.pop();
//获取栈顶元素
Curpos = pStack.GetTop();
}
break;
}
//是否到达终点
if (Endpos == Curpos)
{
isFindEnd = true;
break;
}
//没有到达终点
if (pStack.isempty())
{
printf("这条路没有终点!\n");
return 0;
}
}
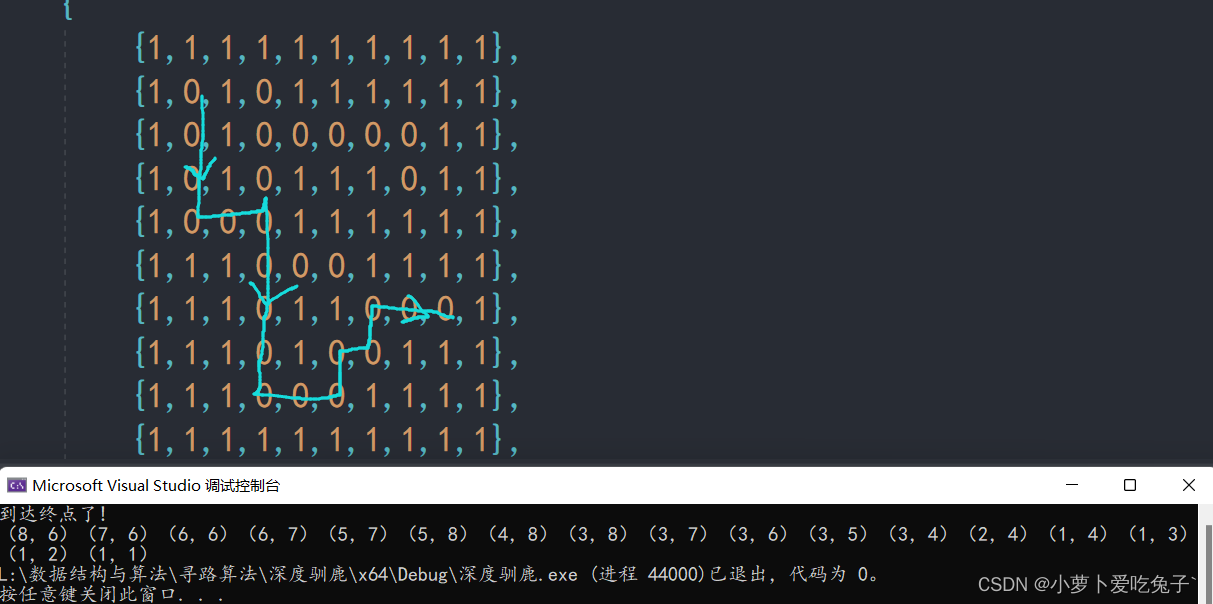
简单测试寻路过程
到达终点后依次从后往前退栈,打印出路径情况
int x, y;
if (isFindEnd)
{
//到达终点
printf("到达终点了!\n");
while (!pStack.isempty())
{
x=pStack.GetTop().col;
y = pStack.GetTop().row;
printf("(%d,%d)", x, y);
pStack.pop();
}
}
4. 深度寻路完整代码
包含寻路的图形化界面
具体素材请点击这里
#include "MyVector.h"
#include <Windows.h>
#include <graphics.h>
#define ROW 10
#define COL 10
#define SIZE 50
enum Direct
{
p_up,
p_right,
p_down,
p_left,
};
struct pathNode
{
int dir; //方向 0
bool isFind; //是否走过 false 0没有走过
};
struct Mypoint
{
int row;
int col;
bool operator==(const Mypoint& pos)
{
if (row == pos.row && col == pos.col)
{
return true;
}
return false;
}
};
#if 1
IMAGE road, wall, pos, ren;
void printmapCMD(int(*map)[COL], Mypoint pos);
void printmapDRAW(int(*map)[COL], Mypoint pos);
void load_IMAGE();
int main()
{
int map[ROW][COL] =
{
{1,1,1,1,1,1,1,1,1,1},
{1,0,1,0,1,0,0,1,1,1},
{1,0,1,0,1,1,1,0,1,1},
{1,0,1,0,1,1,1,0,1,1},
{1,0,0,0,1,1,1,0,1,1},
{1,1,1,0,0,0,1,0,1,1},
{1,1,1,0,1,1,0,0,0,1},
{1,1,1,0,1,0,0,1,1,1},
{1,1,1,0,0,0,1,1,1,1},
{1,1,1,1,1,1,1,1,1,1},
};
//辅助地图
pathNode pathMap[ROW][COL] = { 0 };
load_IMAGE();
setbkcolor(WHITE);
cleardevice();
//起始点坐标
Mypoint Begpos = { 1,1 };
//终点坐标
Mypoint Endpos = { 7,2 };
//当前点
Mypoint Curpos = Begpos;
//试探点
Mypoint Researchpos;
//起点坐标入栈
MyVector<Mypoint> pStack;
pStack.push(Curpos);
//起点位置设置为true 走过
pathMap[Curpos.row][Curpos.col].isFind = true;
//是否到达终点
bool isFindEnd = false;
while (1)
{
//试探点重新更新
Researchpos = Curpos;
switch (pathMap[Curpos.row][Curpos.col].dir)
{
case p_up:
//试探点的坐标更新
Researchpos.row--;
//无论是否能走,它的方向肯定要改变
pathMap[Curpos.row][Curpos.col].dir++;
if (pathMap[Researchpos.row][Researchpos.col].isFind == false &&
map[Researchpos.row][Researchpos.col] == 0)
{
//能走 就走
Curpos = Researchpos;
//当前点位置入栈
pStack.push(Curpos);
//当前点标记已经走过
pathMap[Curpos.row][Curpos.col].isFind = true;
}
break;
case p_right:
//试探点的坐标更新
Researchpos.col++;
//无论是否能走,它的方向肯定要改变
pathMap[Curpos.row][Curpos.col].dir++;
if (pathMap[Researchpos.row][Researchpos.col].isFind == false &&
map[Researchpos.row][Researchpos.col] == 0)
{
//能走 就走
Curpos = Researchpos;
//当前点位置入栈
pStack.push(Curpos);
//当前点标记已经走过
pathMap[Curpos.row][Curpos.col].isFind = true;
}
break;
case p_down:
//试探点的坐标更新
Researchpos.row++;
//无论是否能走,它的方向肯定要改变
pathMap[Curpos.row][Curpos.col].dir++;
if (pathMap[Researchpos.row][Researchpos.col].isFind == false &&
map[Researchpos.row][Researchpos.col] == 0)
{
//能走 就走
Curpos = Researchpos;
//当前点位置入栈
pStack.push(Curpos);
//当前点标记已经走过
pathMap[Curpos.row][Curpos.col].isFind = true;
}
break;
case p_left:
//试探点的坐标更新
Researchpos.col--;
无论是否能走,它的方向肯定要改变
//pathMap[Curpos.row][Curpos.col].dir++;
if (pathMap[Researchpos.row][Researchpos.col].isFind == false &&
map[Researchpos.row][Researchpos.col] == 0)
{
//能走 就走
Curpos = Researchpos;
//当前点位置入栈
pStack.push(Curpos);
//当前点标记已经走过
pathMap[Curpos.row][Curpos.col].isFind = true;
}
else
{
//到达最后一个方向还是没有出去,说明是死胡同
//执行出栈操作
pStack.pop();
Curpos = pStack.GetTop();
}
break;
}
printmapCMD(map, Curpos);
printmapDRAW(map, Curpos);
//是否到达终点
if (Endpos == Curpos)
{
isFindEnd = true;
break;
}
//没有到达终点
if (pStack.isempty())
{
printf("这条路没有终点!\n");
return 0;
}
}
int x, y;
if (isFindEnd)
{
//到达终点
printf("到达终点了!\n");
while (!pStack.isempty())
{
x=pStack.GetTop().col;
y = pStack.GetTop().row;
printf("(%d,%d)", x, y);
putimage(SIZE + x * SIZE, SIZE + y * SIZE, &pos);
pStack.pop();
}
}
system("pause");
return 0;
}
#else
int main()
{
MyVector<int> a;
for (int i = 0; i < 10; i++)
{
a.push(i);
}
while (!a.isempty())
{
printf("%d ", a.GetTop());
a.pop();
}
return 0;
}
#endif
void printmapDRAW(int(*map)[COL], Mypoint pos)
{
system("cls");
for (int i = 0; i < ROW; i++)
{
for (int j = 0; j < COL; j++)
{
if (i == pos.row && j == pos.col)
{
putimage(SIZE + j * SIZE, SIZE + i * SIZE, &ren);
}
else if (map[i][j] == 1)
{
putimage(SIZE + j*SIZE, SIZE + i*SIZE,&wall);
}
else if (map[i][j]==0)
{
putimage(SIZE + j * SIZE, SIZE + i * SIZE, &road);
}
}
printf("\n");
}
}
void printmapCMD(int(*map)[COL], Mypoint pos)
{
system("cls");
for (int i = 0; i < ROW; i++)
{
for (int j = 0; j < COL; j++)
{
if (i == pos.row && j == pos.col)
{
printf("人");
}
else if (map[i][j] == 1)
{
printf("墙");
}
else if (map[i][j] == 0)
{
printf(" ");
}
}
printf("\n");
}
}
void load_IMAGE()
{
initgraph(640, 640, SHOWCONSOLE);
loadimage(&wall, L"./wall.bmp",50,50);
loadimage(&ren, L"./ren.bmp",50,50);
loadimage(&pos, L"./pos.bmp",50,50);
loadimage(&road, L"./road.bmp", 50, 50);
}