写字机器人制作教程2.0
在一年前发布了写字机器人1.0,做的比较low,疫情期间在家重新建模,升级了2.0
点击前往写字机器人1.0
文件下载请前往文章末尾。
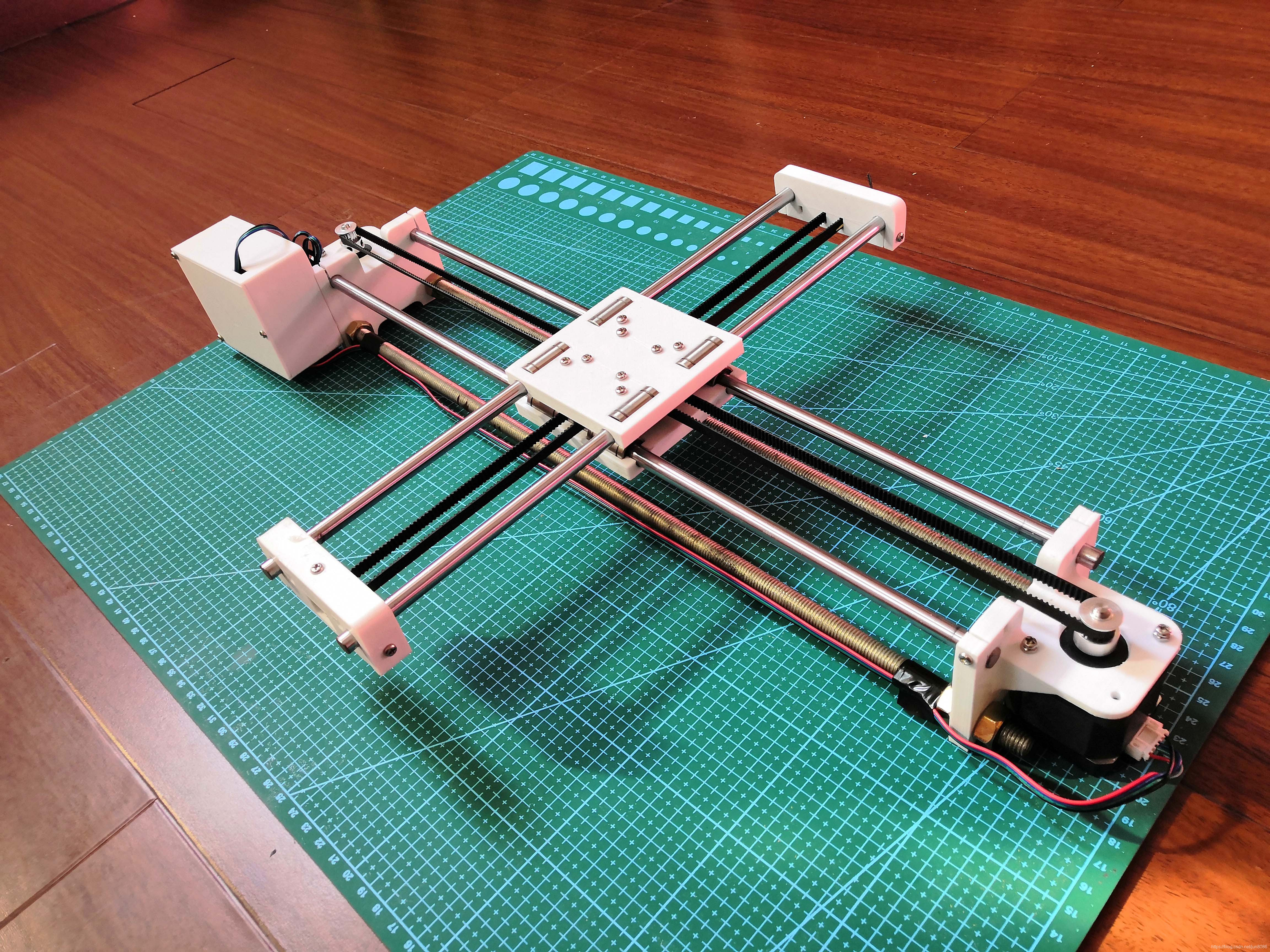
效果图如下:
视频教程
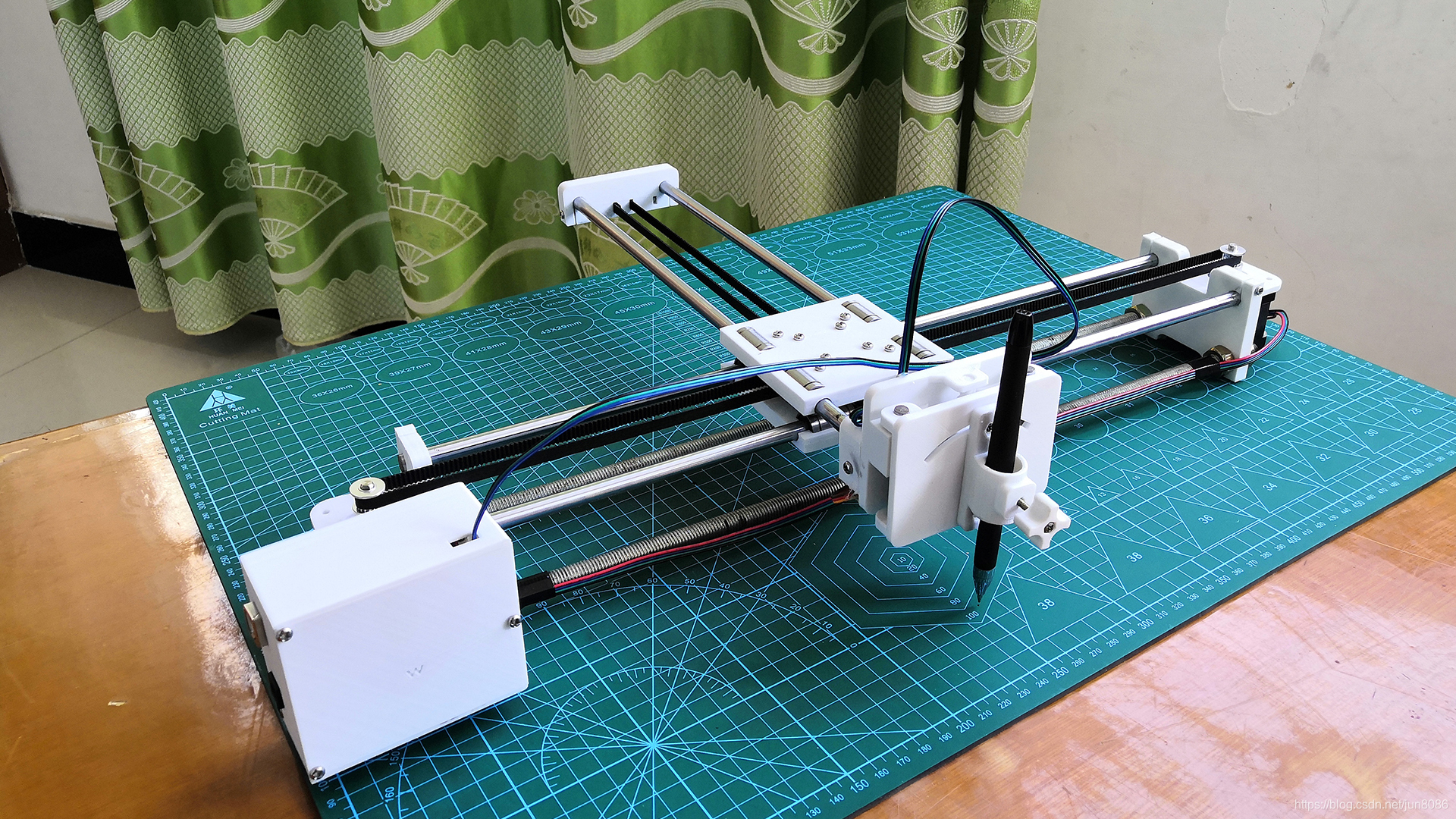
0基础制作写字机器人
详细教程如下:
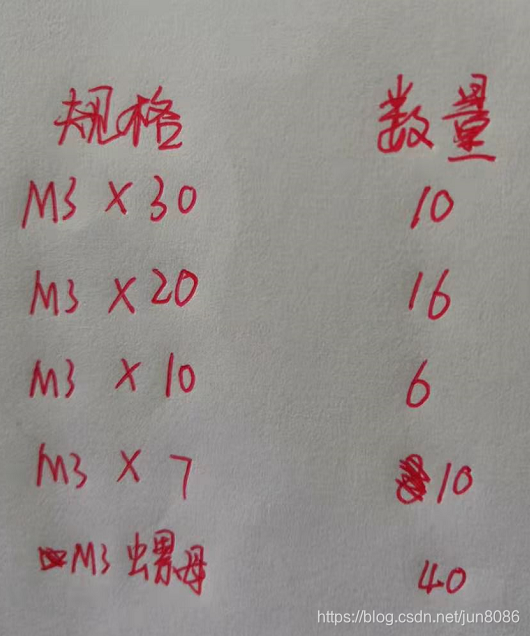
一、材料清单。
1.需购买材料;(图中部分材料买贵了,预算大概在200左右)

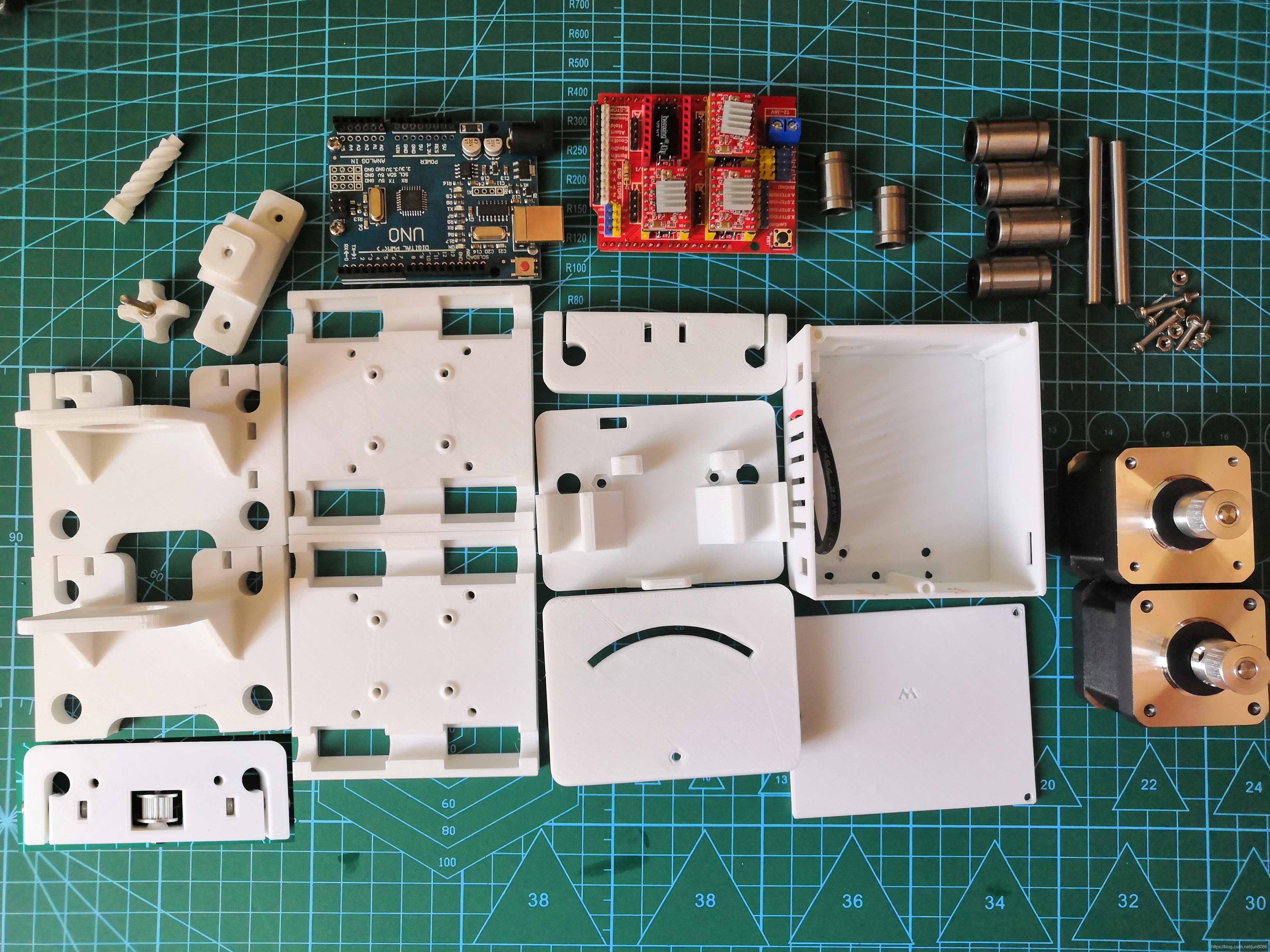
2.需打印框架;(文末下载链接)
3.所有零件展示:
二、开始组装。
1.组装笔架及测试,按照视频组装,在控制电路下载过程序的基础上,控制笔架运动;
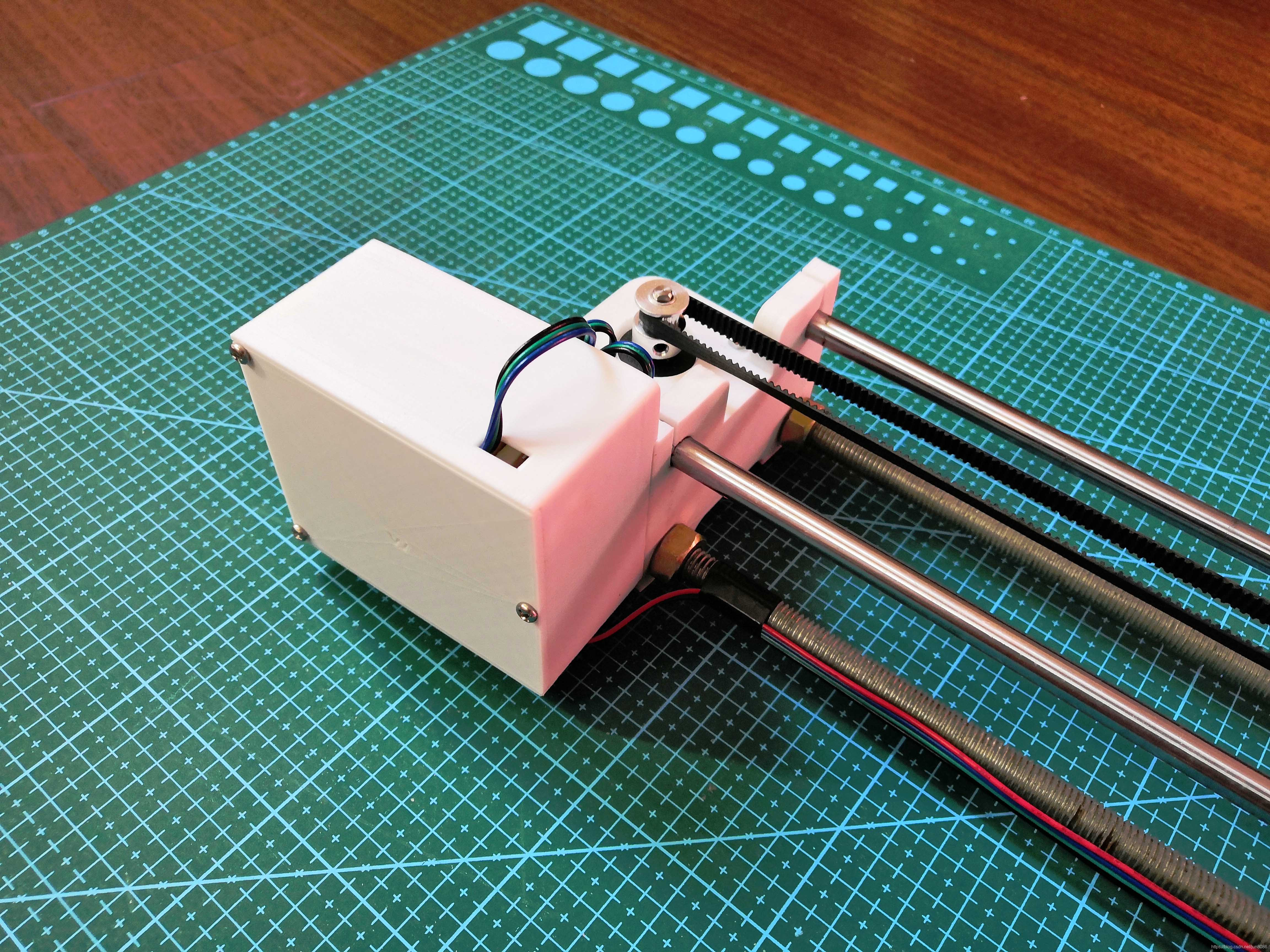
2.组装电机坐及电路盒,电路盒固定在一个电机坐侧面,也可不固定电路盒;
3.中心块组装,安装8个直线轴承,以及4个惰轮,用螺栓螺母固定;
5.把电机坐、中心块、丝杆、光杆按照图示组装起来;
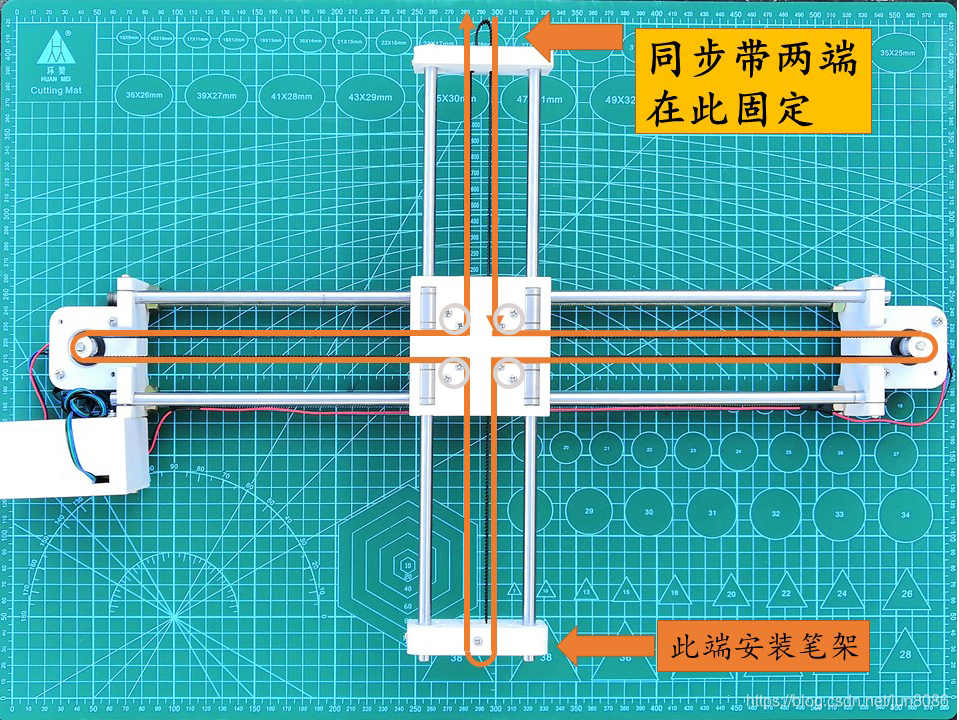
6.按照图片安装同步带并固定;
7.安装笔架;
8.组装控制电路。
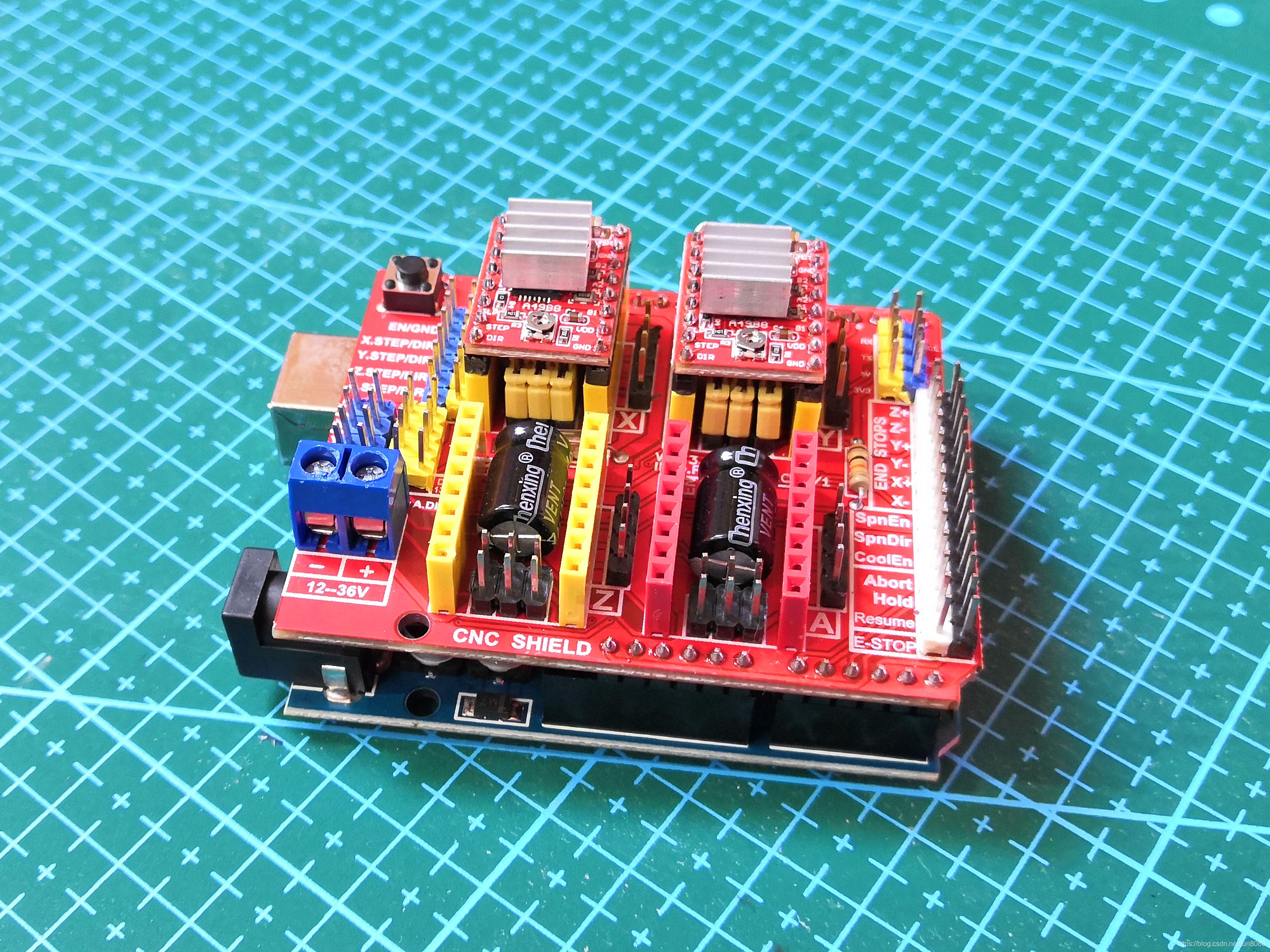
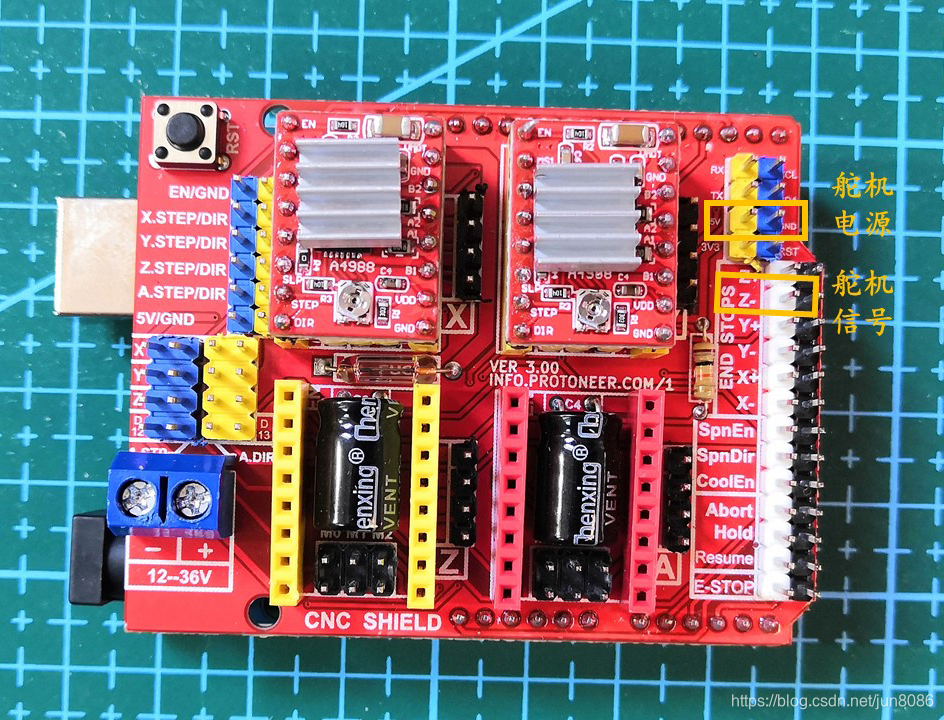
①CNC shield 与Aaduino组装、A4988驱动芯安装、短接片位置;
②舵机接线
三、向控制电路下载驱动程序。
1.下载安装arduino IDE,安装驱动程序 grbl-servo-master.zip库(视频可见);
2.选择芯片类型、及端口号,端口号可在电脑管理的硬件管理中找到;
3.编译,上传,上传成功会有提示。
四、写字测试。
1.电脑打开写字软件(网上很多,有破解的和收费的),选择端口号(同arduino IDE中上传端口)、波特率115200、然后连接;
2.根据写字机电脑控制软件不同,需要对相应参数进行设置,
①知道自己步进电机的步距角,传动齿轮齿数、同步带齿距,计算 X、Y轴每毫米多少步,修改并保存;
②调整舵机相关参数,修改并保存;、
3.调整X、Y轴方向,与笔运动方向相适应;
3.输入文字调整格式,开始书写。
五、各种踩过的坑!
1.步进电机要买D轴的,圆轴的一时固定住了,没多久会松;
2.直线轴承一共是10个,8个 LM8UU 直线轴承,2个LM6UU 直线轴承;
3.同步带在选择时要2米,一定要买2米,和店家沟通好;
4.步进电机线最短80cm,一共两根,要有接线端子的;
5.CNC SHIELD 扩展板要一根圆孔电源接线端子;
6.螺丝螺母多买一些,可能会突然消失;
六、遇到的各种问题(你遇到其它问题可在评论区补充)
在写字机器人1.0里已经解决了许多问题,点击前往。
1.arduino 板子无法下载程序,并驱动舵机,
原因:板子买错了,选贴片版的吧,还便宜些。
2.驱动舵机过程中,舵机只运行一次,再无法响应,重启又再运行一次;
原因:①检查接线,有无接触不良;②arduino板子有问题,换板子;
3.写字过程中写一半定在那儿不动了,始终无法写完;
原因:①(笔未抬起)笔架传动螺杆滑块部分阻力太大,打磨光滑,涂润滑油;②步进电机驱动电压太低,调节A4988驱动芯片上的滑动变阻器调节;
4.步进电机振动、发热(80℃一下均为正常);
原因:步进电机驱动电压、电流过低或过高,调节A4988驱动芯片上的滑动变阻器调节;
七、一些建议:
1.经济允许下选精度高一点的直线轴承;
2.不要做的过大,机器越大精度越低;
相关下载:
1.3D打印文件;
2. grbl-servo-master.zip库文件;
3. arduino IDE 可去官网下载最新版;
4. 写字机上位机公众号获取。
有兴趣关注一下公众号“电子玩家营地”在这上边消息容易回复些。
3D打印文件回复“ 3D打印文件”
库文件回复“库文件 ”
