ndt_solver 和ndt_voxel_grid_covariance
文章目录
前言
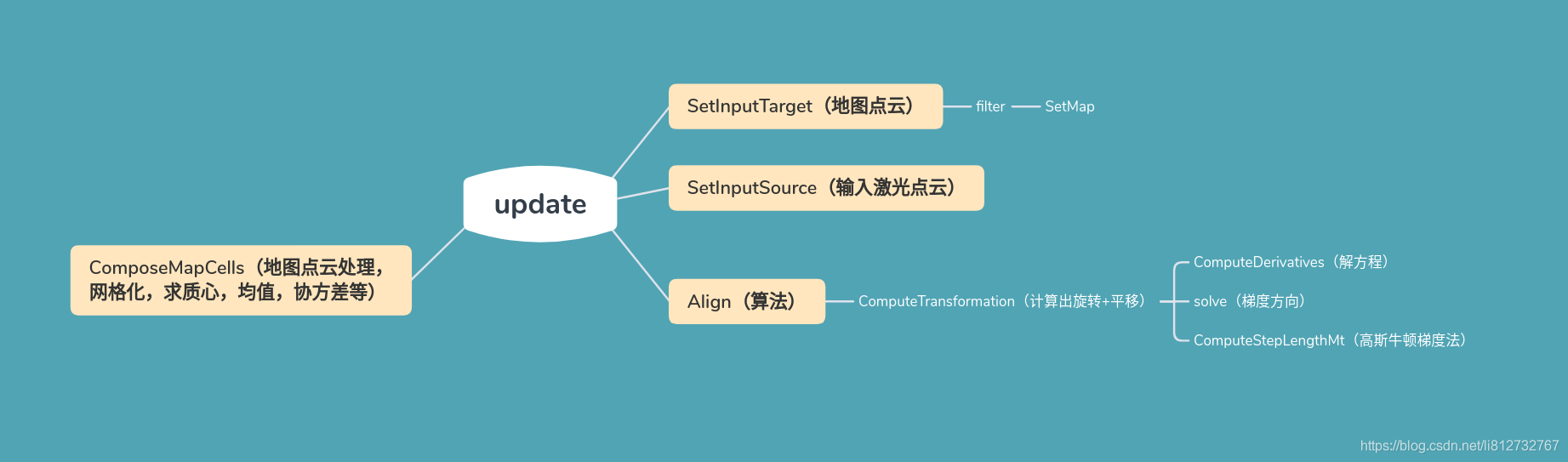
一、SetInputTarget()
对地图点云进行了滤波处理;
设置地图点云的体素滤波分辨率;
输入算法目标点云,即地图点云;
inline void SetInputTarget(const std::vector<Leaf> &cell_leaf,
const PointCloudTargetConstPtr &cloud) {
//输入数据检查
if (cell_leaf.empty()) {
AWARN << "Input leaf is empty.";
return;
}
if (cloud->points.empty()) {
AWARN << "Input target is empty.";
return;
}
//匹配目标点云赋值
target_ = cloud;
//ndt_voxel_grid_covariance 文件类
target_cells_.SetVoxelGridResolution(resolution_, resolution_, resolution_);//设置分辨率
target_cells_.SetInputCloud(cloud);//输入数据
target_cells_.filter(cell_leaf, true);//滤波
}
二 、SetInputSource()
输入实时激光点云数据,并保存到ndt_solver 的 input_中
inline void SetInputSource(const PointCloudTargetConstPtr &cloud) {
if (cloud->points.empty()) {
AWARN << "Input source is empty.";
return;
}
input_ = cloud;
}
三 、filter()
对地图点云进行滤波,去掉小于6个点的网格(NDT算法原理决定的,),并将结果放入kdtree_,便于搜索;
//
inline void filter(const std::vector<Leaf> &cell_leaf,
bool searchable = true) {
voxel_centroids_ = PointCloudPtr(new PointCloud);
SetMap(cell_leaf, voxel_centroids_);//进行滤波,去掉小于6个的点
if (voxel_centroids_->size() > 0) {
kdtree_.setInputCloud(voxel_centroids_);//将滤波处理后的地图点云放入kdtree中,便于NDT算法搜索
}
}
2.1.SetMap()
对地图点云进行滤波处理,去掉网格内小于6个的点,输出点云坐标(x,y,z)及对应中心点的地图坐标编号;
最后将结果保存到output中;
至少需要包含 6 个点是为了防止共面或共线,以计算 Σ的逆;
void VoxelGridCovariance<PointT>::SetMap(const std::vector<Leaf>& map_leaves,
PointCloudPtr output) {
voxel_centroids_leaf_indices_.clear();
// Has the input dataset been set already
//判断是否有地图点云数据
if (!input_) {
AWARN << "No input dataset given. ";
output->width = output->height = 0;
output->points.clear();
return;
}
// Copy the header + allocate enough space for points
output->height = 1;
output->is_dense = true;//不包涵Inf/NaN这种值无限值(包含为false)
output->points.clear();
// Get the minimum and maximum dimensions
Eigen::Vector4f min_p, max_p;
pcl::getMinMax3D<PointT>(*input_, min_p, max_p); //获取最大、最小尺寸,即地图点最大,最小值
Eigen::Vector4f left_top = Eigen::Vector4f::Zero();
left_top.block<3, 1>(0, 0) = map_left_top_corner_.cast<float>();//类型转换
min_p -= left_top;
max_p -= left_top;
// Compute the minimum and maximum bounding box values
//将x,y,z 转为 box 值,类似栅格地图像素值
min_b_[0] = static_cast<int>(min_p[0] * inverse_leaf_size_[0]);
max_b_[0] = static_cast<int>(max_p[0] * inverse_leaf_size_[0]);
min_b_[1] = static_cast<int>(min_p[1] * inverse_leaf_size_[1]);
max_b_[1] = static_cast<int>(max_p[1] * inverse_leaf_size_[1]);
min_b_[2] = static_cast<int>(min_p[2] * inverse_leaf_size_[2]);
max_b_[2] = static_cast<int>(max_p[2] * inverse_leaf_size_[2]);
// Compute the number of divisions needed along all axis
div_b_ = max_b_ - min_b_ + Eigen::Vector4i::Ones(); //计算沿所有轴所需的分段数
div_b_[3] = 0;
// Set up the division multiplier
divb_mul_ = Eigen::Vector4i(1, div_b_[0], div_b_[0] * div_b_[1], 0);
// Clear the leaves
leaves_.clear();
output->points.reserve(map_leaves.size());
voxel_centroids_leaf_indices_.reserve(leaves_.size());
for (unsigned int i = 0; i < map_leaves.size(); ++i) {
const Leaf& cell_leaf = map_leaves[i];
Eigen::Vector3d local_mean = cell_leaf.mean_ - map_left_top_corner_;
int ijk0 =
static_cast<int>(local_mean(0) * inverse_leaf_size_[0]) - min_b_[0];
int ijk1 =
static_cast<int>(local_mean(1) * inverse_leaf_size_[1]) - min_b_[1];
int ijk2 =
static_cast<int>(local_mean(2) * inverse_leaf_size_[2]) - min_b_[2];
// Compute the centroid leaf index
int idx = ijk0 * divb_mul_[0] + ijk1 * divb_mul_[1] + ijk2 * divb_mul_[2];//求中心点对应的index 为什么这样弄?地图的格式原因?
Leaf& leaf = leaves_[idx];
leaf = cell_leaf;
//体素中包含的点必须大于6个
if (cell_leaf.nr_points_ >= min_points_per_voxel_) {
output->push_back(PointT());
output->points.back().x = static_cast<float>(leaf.mean_[0]);
output->points.back().y = static_cast<float>(leaf.mean_[1]);
output->points.back().z = static_cast<float>(leaf.mean_[2]);
voxel_centroids_leaf_indices_.push_back(idx);
}
}
output->width = static_cast<uint32_t>(output->points.size());
}
总结
版权申明:转载请注明出处,严禁用于商业用途。