51单片机-红外遥控
一、红外遥控
- 红外遥控是利用红外光进行通信的设备,由红外LED将调制后的信号发出,由专门的红外接收头进行调制输出
- 通信方式:单工、异步
- 通信协议标准:NEC标准
- 红外LED波长:940nm
下图为红外遥控的硬件电路
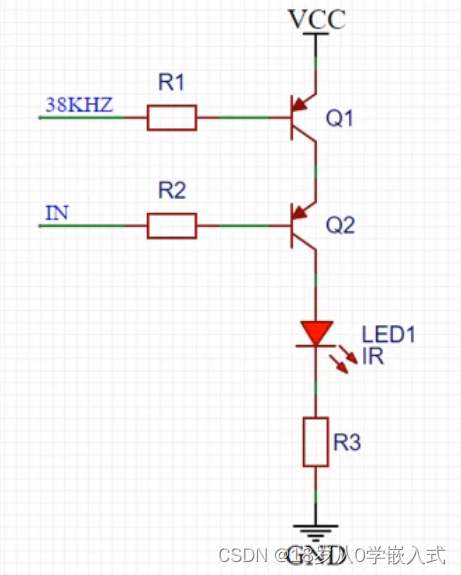
- 发送部分
下图是由两个三极管开关组成,当同时打开时,红外LED才发光,第一个是38KHz的方波频率(抗干扰),IN口是发送的高低电平,最终红外LED会以38KHz的频率闪着亮
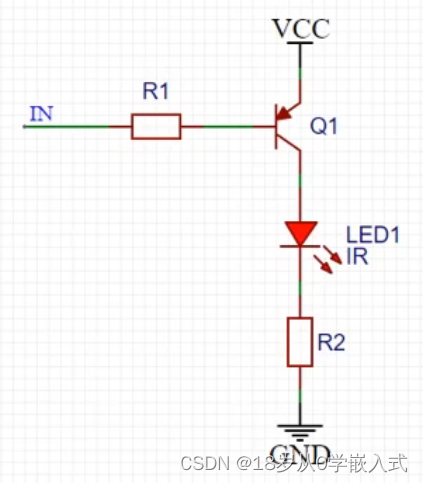
下图中只需要给IN低电平时,LED就亮,高电平时,LED就不亮,但是要软件配置出38KHz的频率
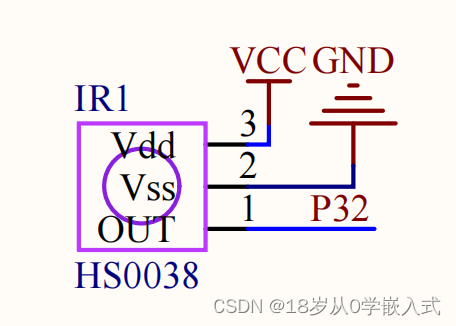
- 接收部分
OUT端口接在单片机上,红外接收头接收到信号以后,解码调制输出给单片机,进行其他操作
红外接收头高低电平变化很快,周期很短,所以需要将OUT口接在外部中断接口上,外部中断由下降沿触发。当接收头接收到信号,内置设备完成解码后,需要立即从OUT引脚输出,所以采用外部中断更好
- 空闲状态:红外LED不亮,接收头OUT引脚输出高电平
- 发送低电平:红外LED以38KHZ频率闪烁发光,接收头OUT引脚输出低电平
- 发送高电平:红外LED不亮,接收头OUT引脚输出高电平
二、红外遥控-NEC编码时序
- 当遥控器发送信号给红外接收头,接收头收到信号后,把信号中的高低电平持续时间(波形)发给单片机,是根据NEC协议去发送的。单片机去捕捉引脚的时序,去判断是哪一个按键按下,由于电平变换时间较快,采用外部中断更能捕捉到这个电平变换
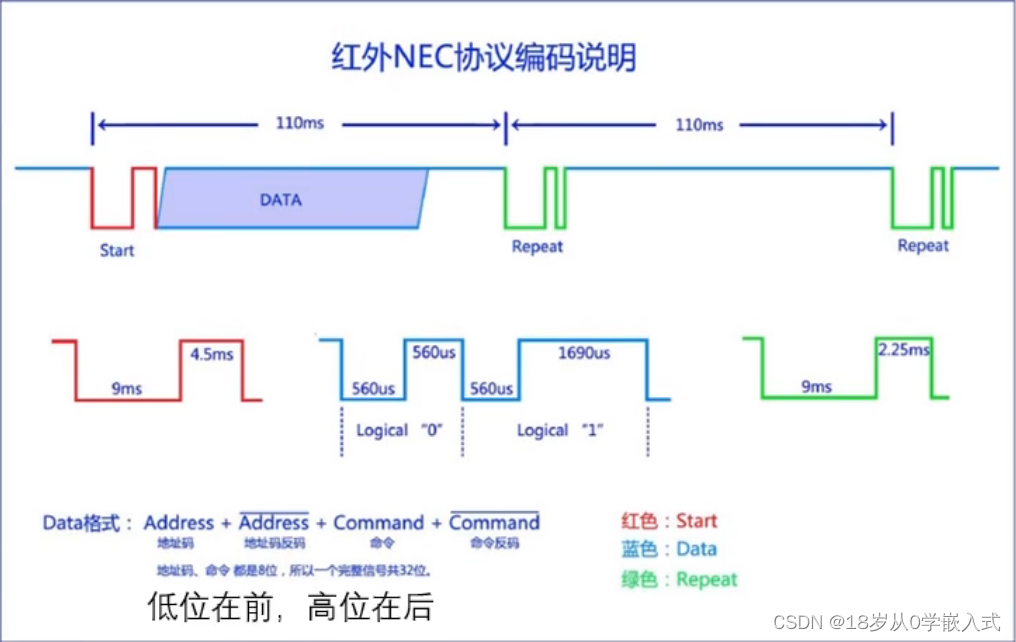
- 下面是接收头OUT输出波形的红外NEC协议编码
空闲状态下为高电平,一旦遥控器按键按下(OUT接收头告诉单片机我要开始发数据了),则OUT输出头给一个9ms的低电平,4.5ms的高电平表示Start信号;然后发送数据DATA,DATA由地址码、地址码反码(地址码取反)、命令和命令反码4个字节组成,高低电平持续时间都为560us,表示发送0,高电平为1690us,低电平560us表示发送1;最后一块表示重复发送信号,低电平9ms,高电平2.25ms
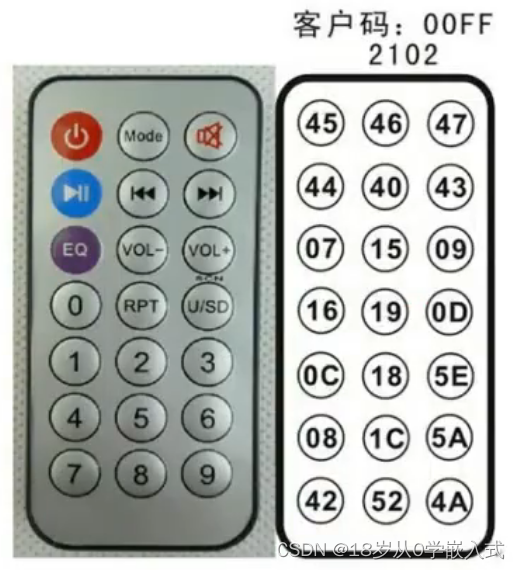
- 下面给出遥控器的键码(命令字)
三、外部中断
- 51系列单片机的外部中断主要有两种触发方式:下降沿触发和低电平触发
- 具体外部中断寄存器配置见定时器中断部分
- 主要配置就是使能外部中断,外部中断触发方式配置等等
四、红外遥控代码
遥控器按下按键,红外接收头接收到数据以后,通过编码时序将数据发送给单片机
下面是IR.c
#include <REGX52.H>
#include "Timer0.h"
#include "Int0.h"
unsigned int IR_Time; //计时
unsigned char IR_State; //状态
unsigned char IR_Data[4]; //DATA数据 4个字节 32位
unsigned char IR_pData; //指向当前存数据的位序,一共收32位
unsigned char IR_DataFlag; //数据结束标志位
unsigned char IR_RepeatFlag; //重发标志位
unsigned char IR_Address; //地址
unsigned char IR_Command; //命令
void IR_Init()
{
Timer0_Init();
Int0_Init();
}
/*
函数功能:返回数据标志位
返回值:1或者0
*/
unsigned char IR_GetDataFlag()
{
if(IR_DataFlag)
{
IR_DataFlag = 0;
return 1; //return语句到, 程序结束
}
return 0;
}
/*
函数功能:返回重复标志位
返回值:1或者0
*/
unsigned char IR_GetRepeatFlag()
{
if(IR_RepeatFlag)
{
IR_RepeatFlag = 0;
return 1; //return语句到, 程序结束
}
return 0;
}
/*
函数功能:返回按键地址
*/
unsigned char IR_GetAddress()
{
return IR_Address;
}
/*
函数功能:返回按键命令
*/
unsigned char IR_GetCommand()
{
return IR_Command;
}
void Int0_Routine(void) interrupt 0 //从第一个下降沿开始到第二个下降沿
{
if(IR_State == 0) //状态0:空闲状态(第一次下降沿)
{
Timer0_SetCounter(0); //计时从0开始
Timer0_Run(1); //开始定时器
IR_State=1; //下次进中断 会从状态1开始
}
else if(IR_State == 1) //状态1:判断Start还是repeat信号
{
IR_Time = Timer0_GetCounter(); //读第一个周期时间
Timer0_SetCounter(0); //重新计时
if(IR_Time > 12442-500 && IR_Time < 12442+500) //start信号
{
IR_State = 2; //状态2:表示解码数据
}
else if(IR_Time>10368-500 && IR_Time<10368+500) //Repeat信号
{
IR_RepeatFlag=1; //收到Repeat信号,说明一帧结束(整个流程Start(Data)--Repeat)
Timer0_Run(0); //定时器关闭
IR_State = 0; //返回状态0
}
else //解码错误:回到状态1去判断S还是R
{
IR_State=1;
}
}
else if(IR_State == 2) //状态2:表示解码数据
{
IR_Time = Timer0_GetCounter(); //读时间
Timer0_SetCounter(0); //清零
if(IR_Time > 1032-500 && IR_Time < 1032+500) //发送0信号
{
IR_Data[IR_pData/8] &= ~(0x01<<(IR_pData%8)); //分别在数组中的四个字节的特定位存0数据(低位在前)
IR_pData++;
}
else if(IR_Time>2074-500 && IR_Time<2074+500) //1信号
{
IR_Data[IR_pData/8] |= (0x01<<(IR_pData%8)); //分别在数组中的四个字节的特定位存1数据
IR_pData++;
}
else //出错
{
IR_pData=0;
IR_State=1;
}
if(IR_pData >= 32) //收完32位数据
{
IR_pData=0;
if((IR_Data[0] == ~IR_Data[1]) && (IR_Data[2] == ~IR_Data[3])) //校验
{
IR_Address = IR_Data[0];
IR_Command = IR_Data[2]; //将地址和命令传给a c
IR_DataFlag = 1; //data传递成功标志位
}
Timer0_Run(0);
IR_State = 0; //空闲状态
}
}
}
外部中断0设置成下降沿有效,当有按键按下时,进入中断服务函数,进行时序编码,红外接收头将4个字节数据发送给单片机,主函数通过按键命令值,进行其他动作