第十五篇 机器视觉案例 之 齿轮齿数检测
1.案例要求
- 检测齿轮齿数
- 测量每一个齿中心到齿轮中心的距离,并将结果按照每行五个的格式输出

2.实现思路
2.1 统计齿轮齿数使用模板匹配工具CogPMAlignTool,并从模板匹配工具的结果集中得到每一个齿的中心点。
2.2 测量距离需要知道两个坐标点,一个是每一个齿的坐标,一个是齿轮中心坐标:齿的坐标已经获得,中心坐标需要一个找圆工具CogFindCircleTool通过找拟合圆得到圆心,找圆工具需要一个圆心的大致坐标位置,因此再使用一个模板匹配工具,最后使用点点距离测量工具测得距离
2.3 距离的输出要求按照每行五个输出,需要对输出的坐标进行处理,代码如下
double x=i%5*100+100; double y=i/5*50+100;
3.使用控件
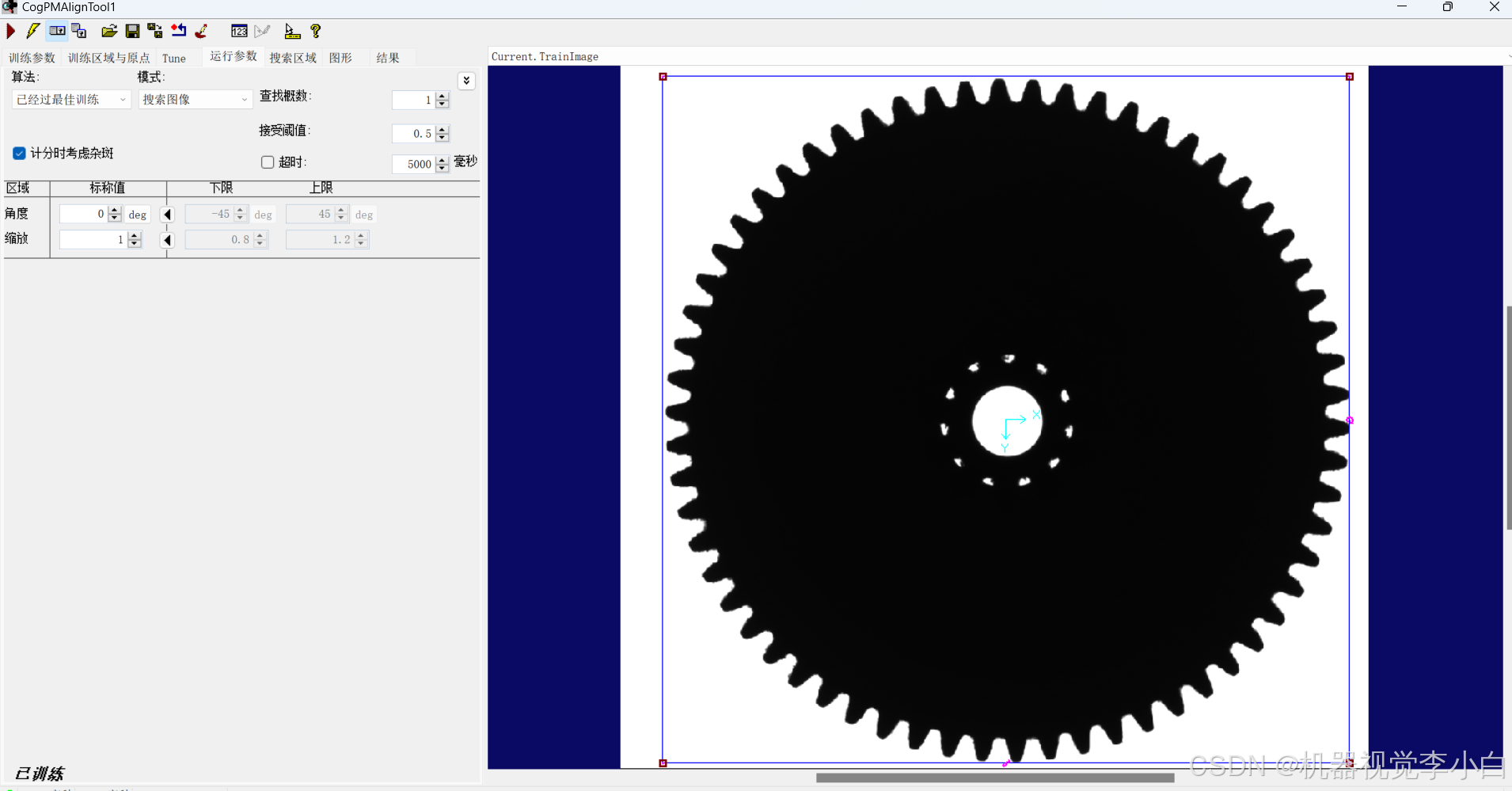
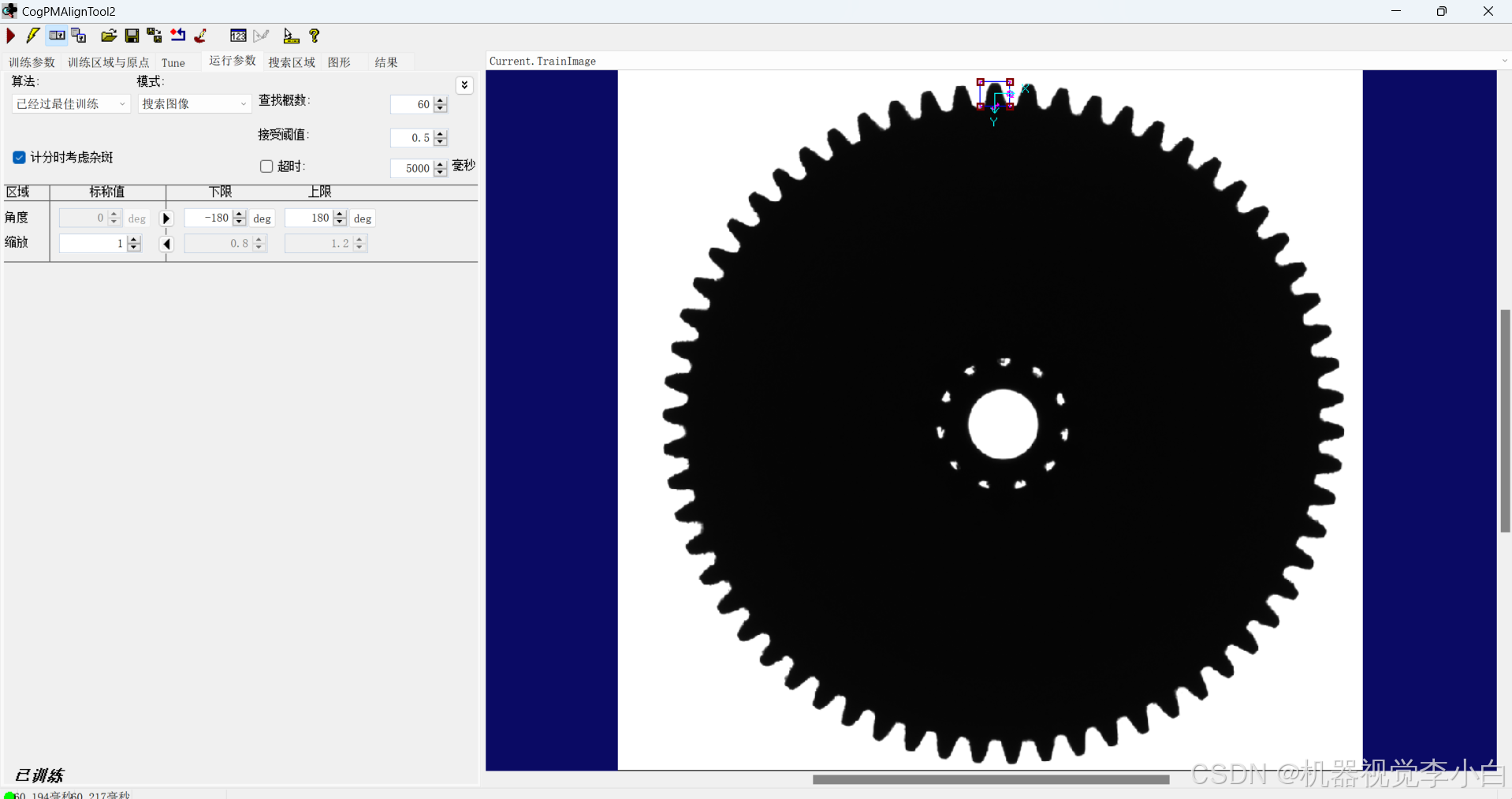
3.1 模板匹配工具 —— CogPMAlignTool
模板匹配工具一用来获得圆心大致位置,给找圆工具
模板匹配工具二用来找到每一个齿,需要调整旋转角度与查找概数
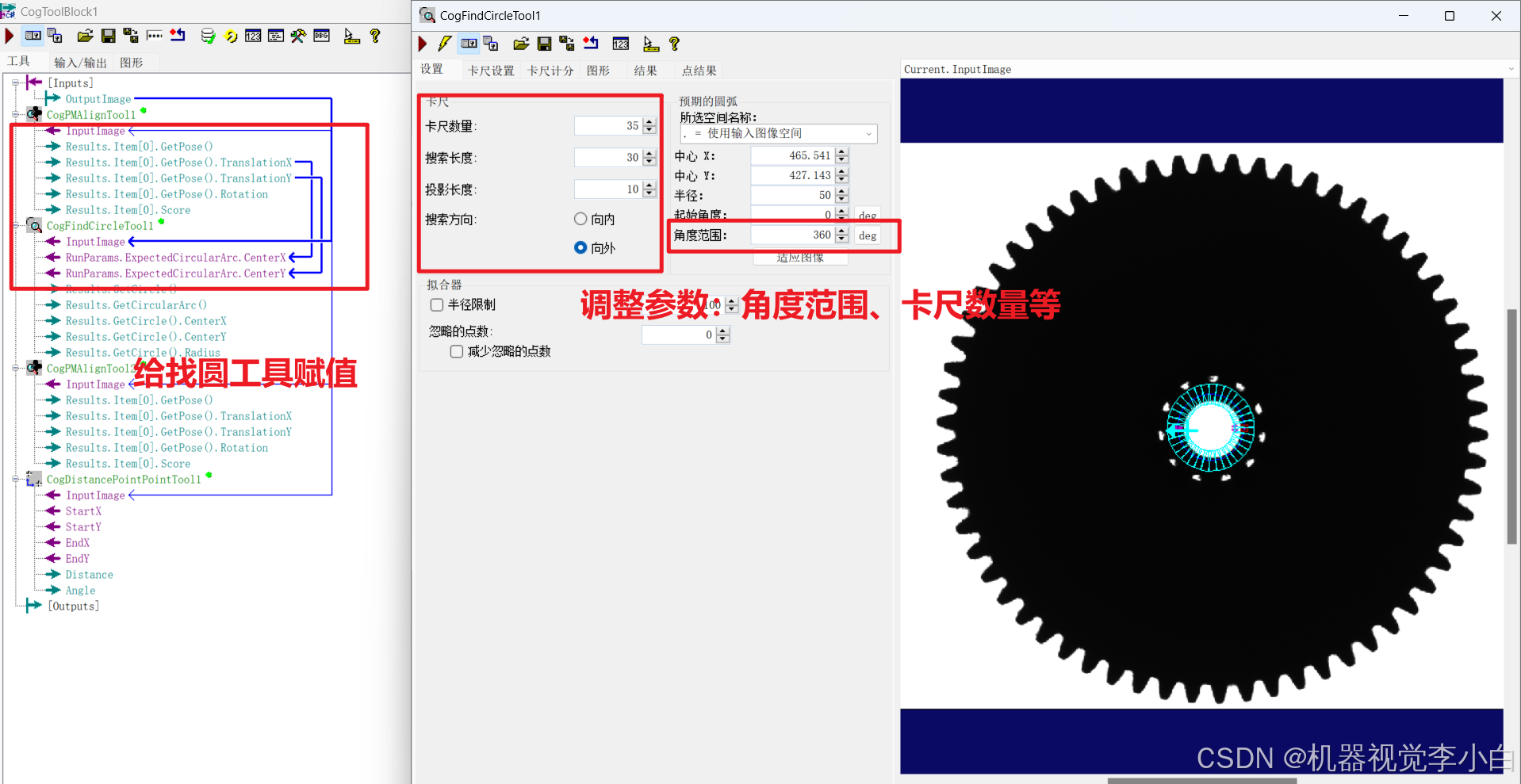
3.2 找圆工具 —— CogFindCircleTool
- 添加终端给坐标
- 调整参数
- 旋转角度为360°
- 卡尺数量:数量越多找的圆越精确(合适的数量即可,过大的数量会导致工具卡顿)
- 搜索方向:向内或向外,这里是向外
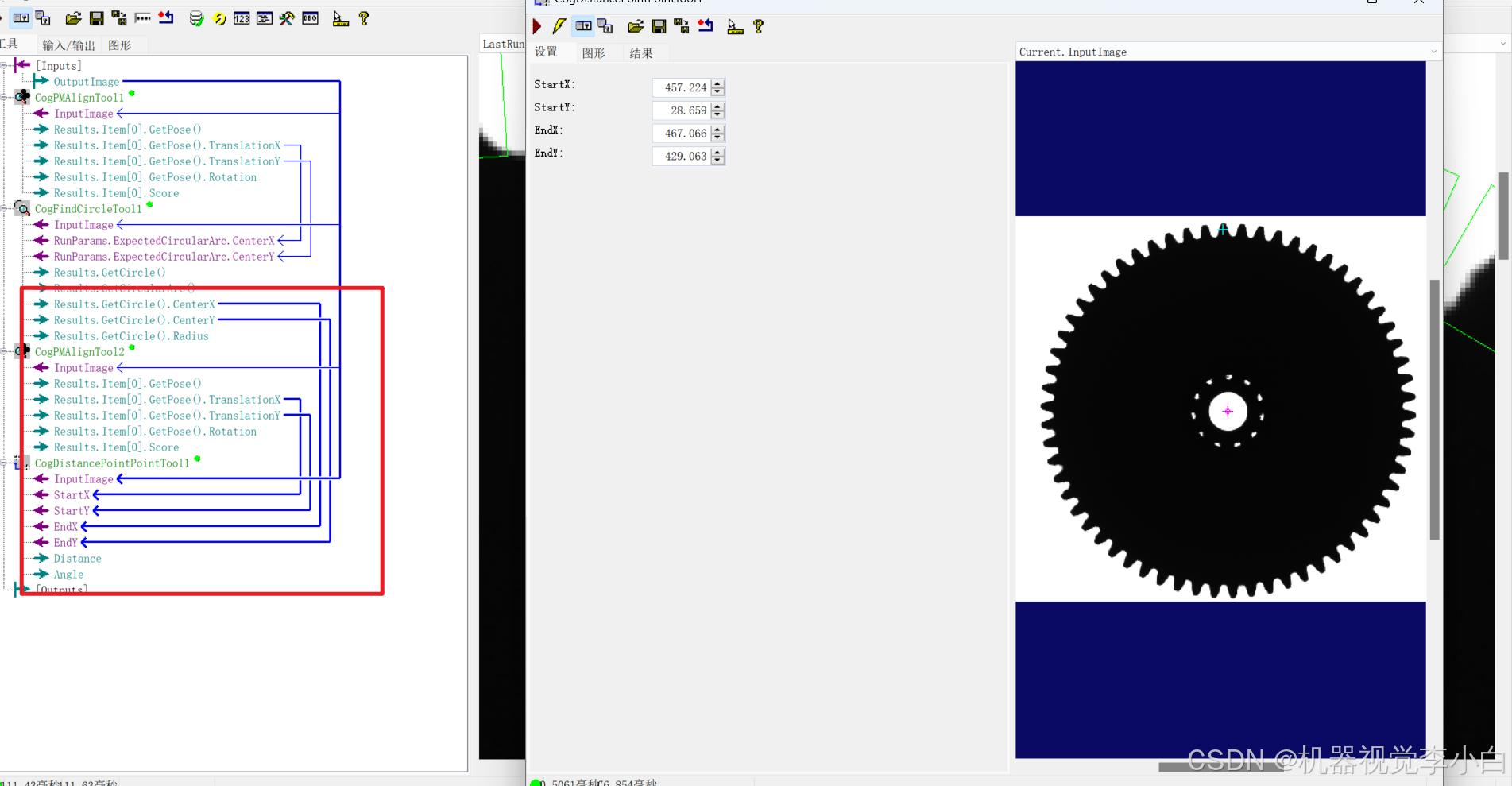
3.3 点点距离工具 —— CogDistancePointPointTool

4.代码逻辑
CogPMAlignTool pma = mToolBlock.Tools["CogPMAlignTool2"]as CogPMAlignTool;
CogDistancePointPointTool dis = mToolBlock.Tools["CogDistancePointPointTool1"]as CogDistancePointPointTool;
CogFindCircleTool fct = mToolBlock.Tools["CogFindCircleTool1"]as CogFindCircleTool;
int count = pma.Results.Count;
labels = new CogGraphicLabel[count];
Label.SetXYText(200,50,"一共有"+count.ToString()+"个");
Label.Color = CogColorConstants.Magenta;
Label.Font = new Font("楷体",20);
for(int i = 0;i < count;i++)
{
CogGraphicLabel label=new CogGraphicLabel();
double x1 = pma.Results[i].GetPose().TranslationX;
double y1 = pma.Results[i].GetPose().TranslationY;
double X = fct.Results.GetCircle().CenterX;
double Y = fct.Results.GetCircle().CenterY;
dis.StartX = x1;
dis.StartY = y1;
dis.EndX = X;
dis.EndY = Y;
dis.Run();
double distance = dis.Distance;
double x=i%5*100+100;
double y=i/5*50+100;
label.SetXYText(x, y, "距离:"+distance.ToString("F0"));
label.Color = CogColorConstants.Orange;
labels[i] = label;
}
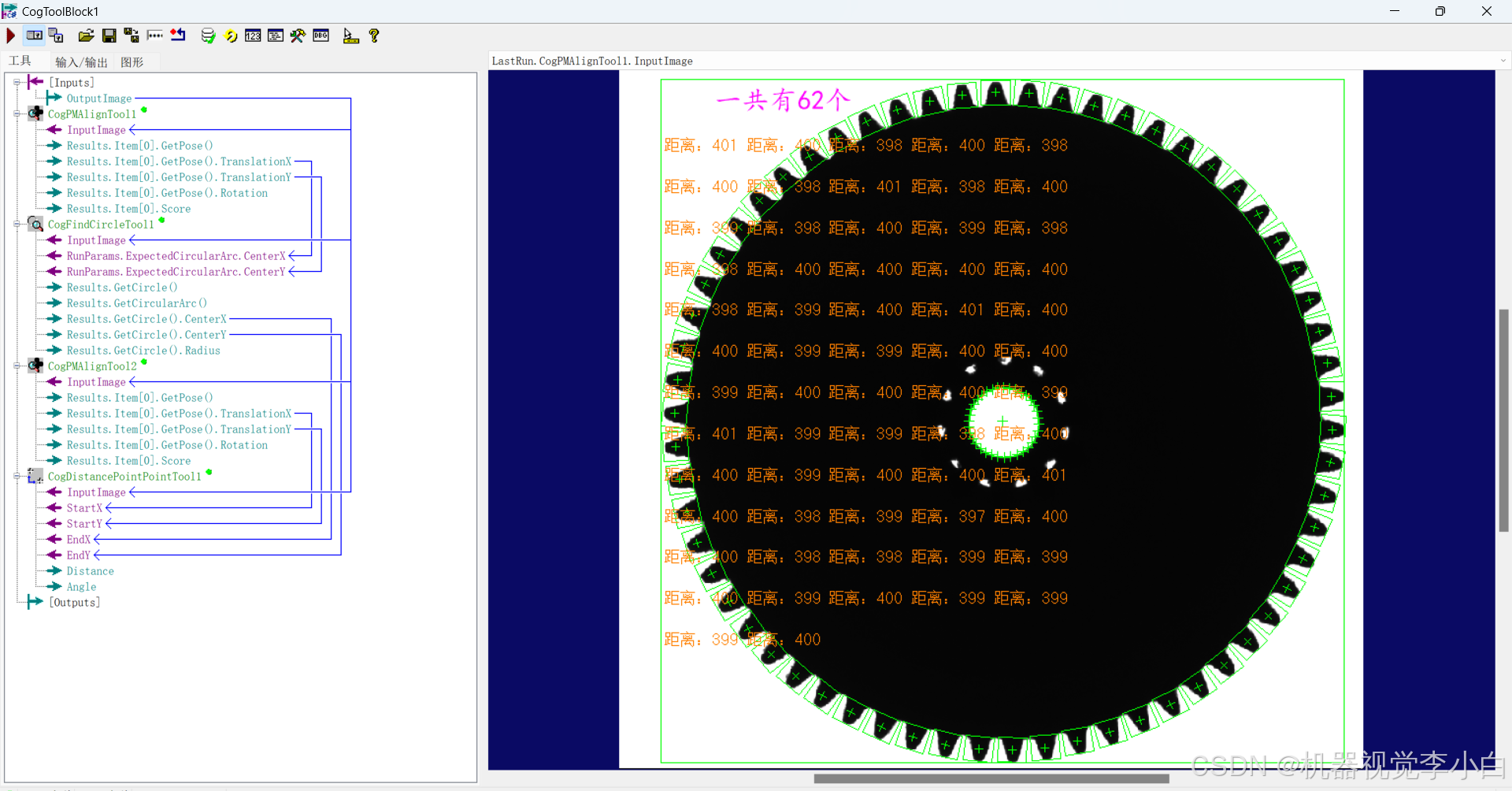
5.实现效果
6.知识点总结
6.1 找圆工具的参数
- 卡尺数量:指参与找圆的圆周上半径方向的找区分点的数量。这些点用于拟合圆,数量越多,拟合的圆可能越准确,但计算量也会相应增加。
- 搜索长度:卡尺搜索区域的长度,即沿圆周方向搜索的范围。这个参数决定了搜索的精细程度。
- 投影长度:卡尺搜索区域的宽度,即径向搜索的范围。它影响搜索的敏感度和准确性。
- 搜索方向:搜索可以从内向外或由外向内进行,哪个方向区分度明显就选哪个方向。
- 预期圆弧参数:用户可以根据需要设置预期圆弧的中心点、半径、起始角度及角度范围等,以帮助工具更准确地找到圆。
- 忽略点数:在拟合过程中,可以忽略掉参与拟合点中误差过大的点。通常可以选取总点数的5%作为忽略点,以提高拟合的准确性。