💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
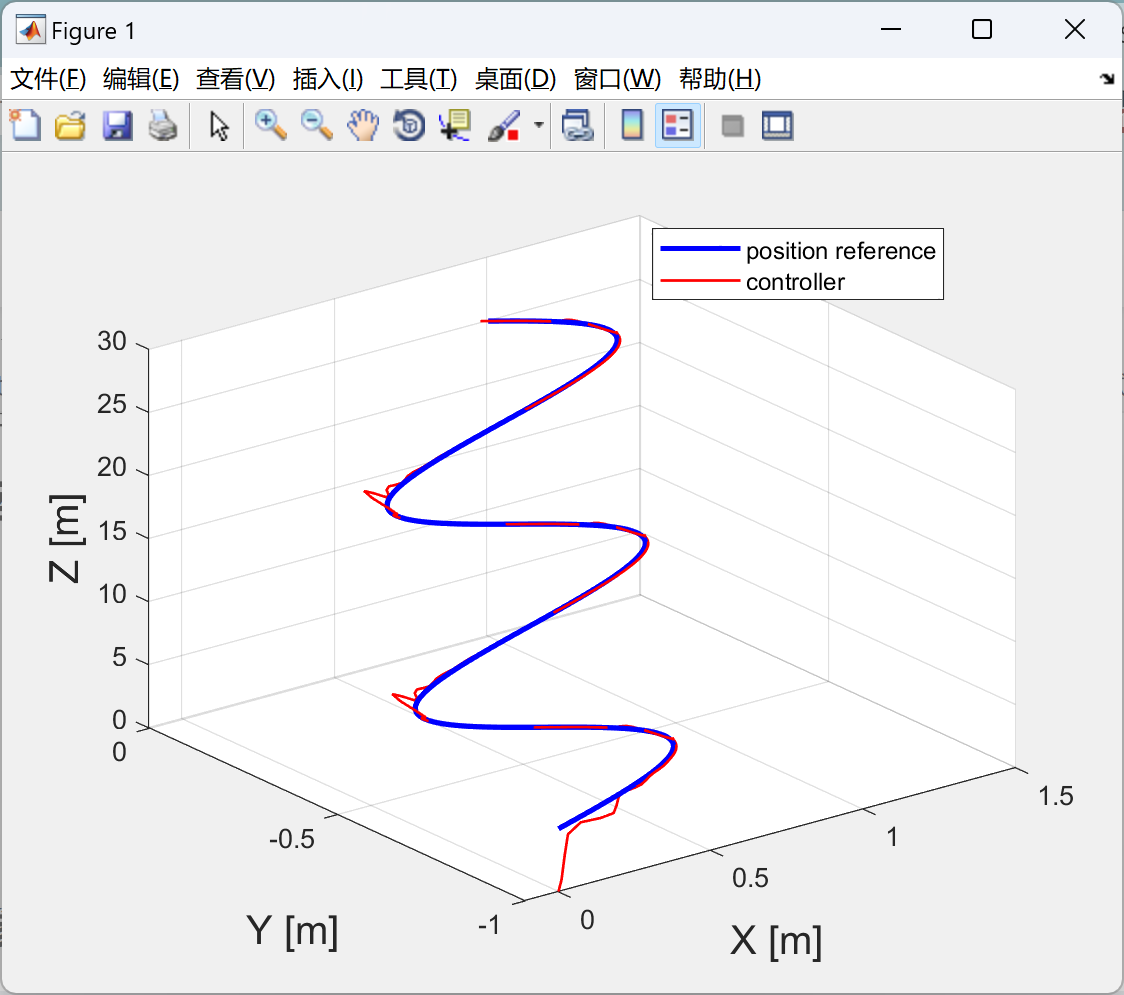
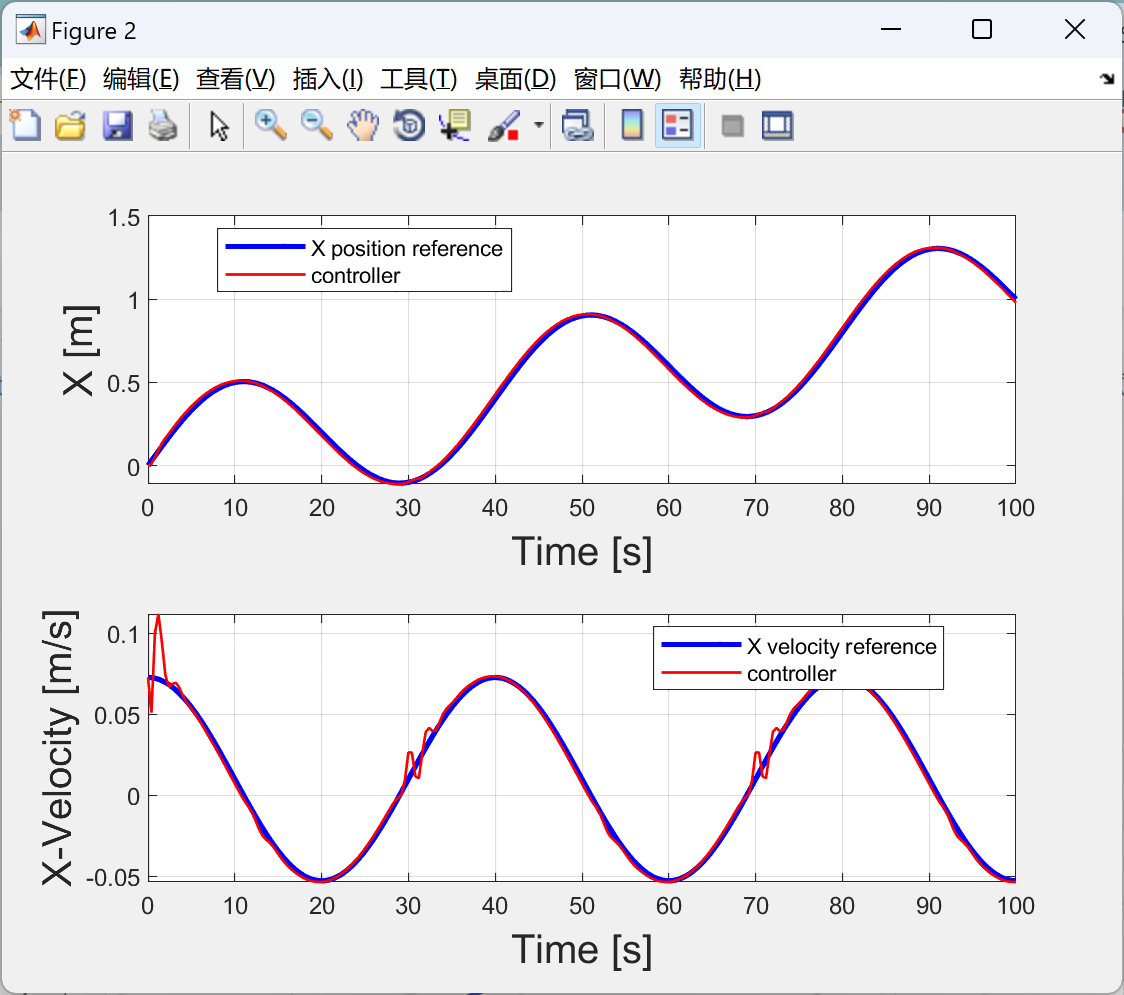
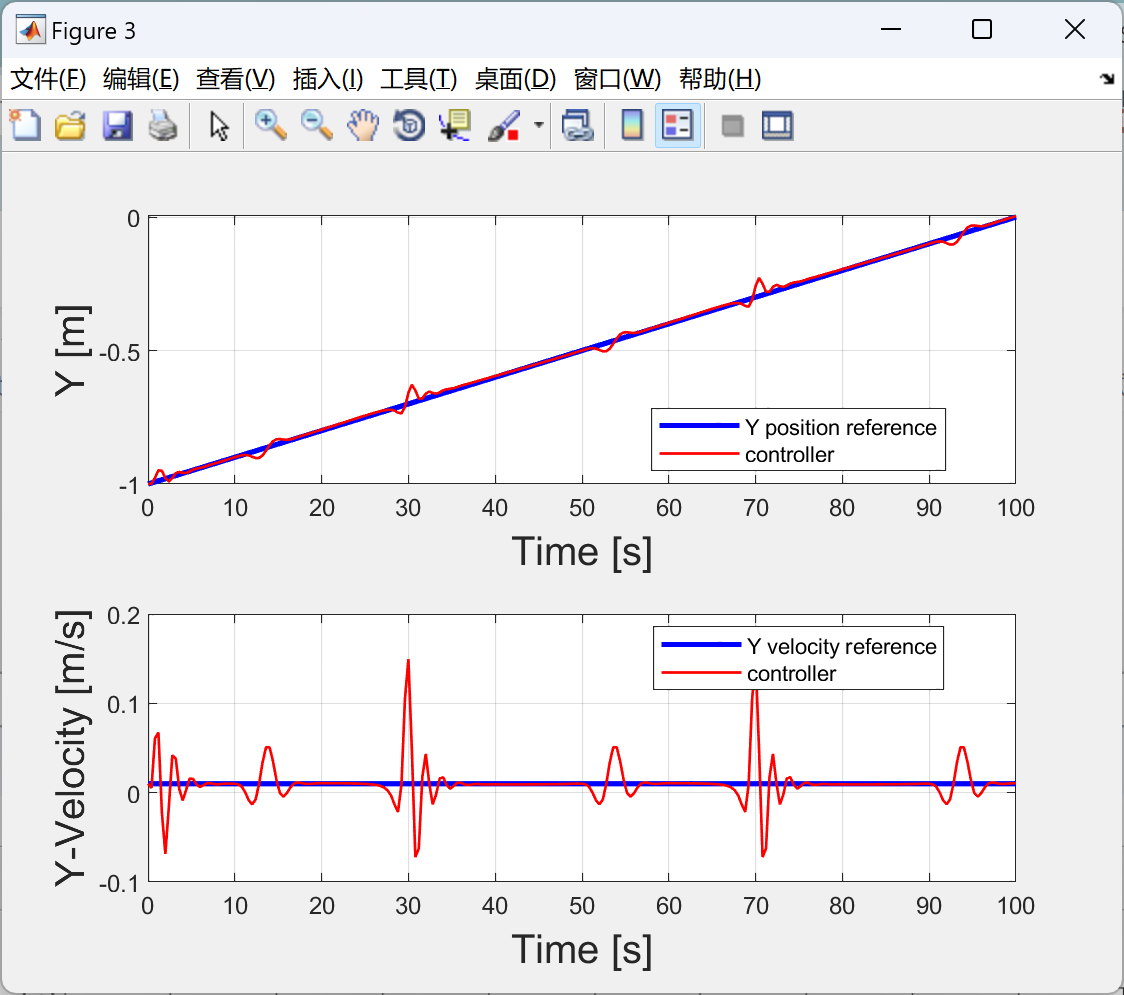
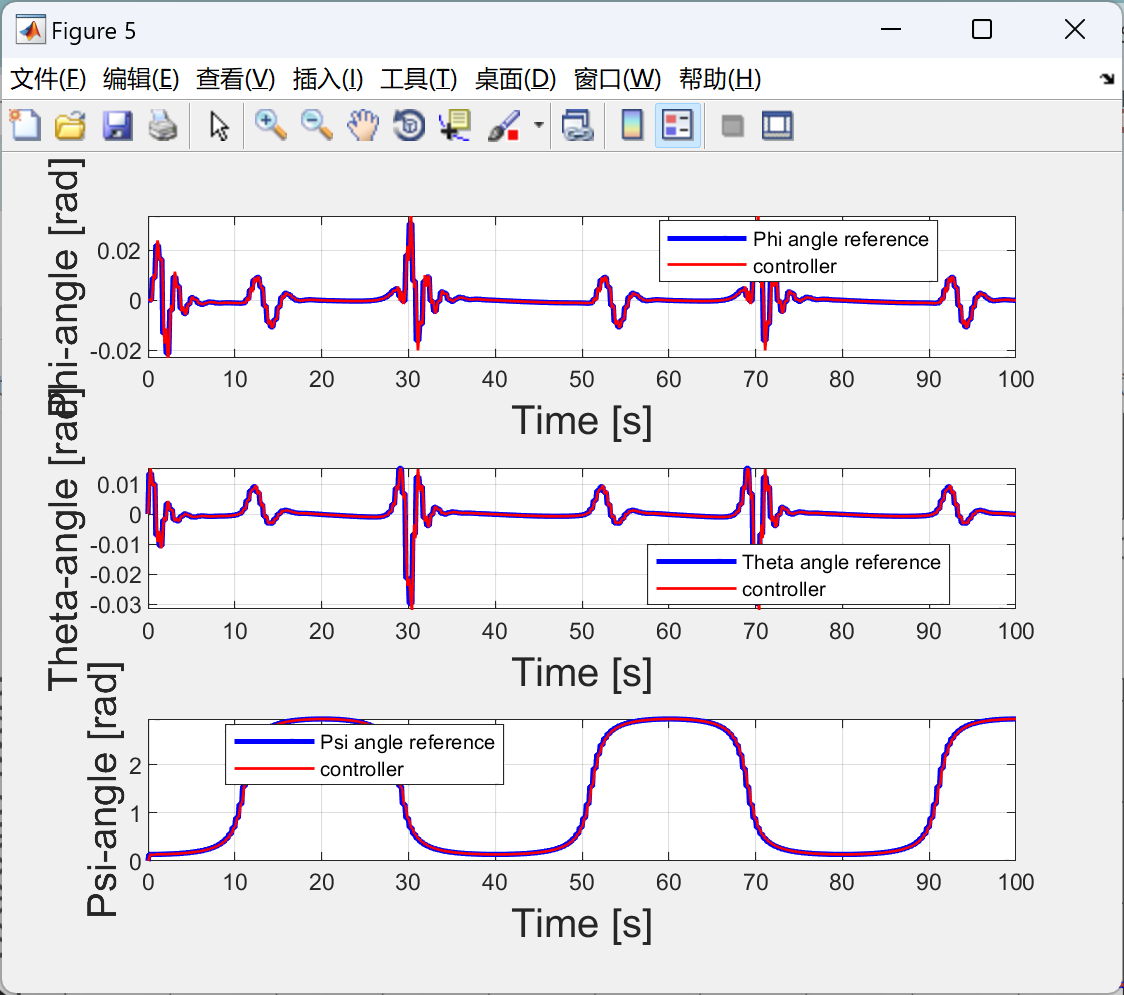
使用线性参数可变(LPV)方法的无人机模型预测控制器是一种先进的控制技术,旨在实现对无人机动态系统的高性能控制。LPV控制器基于对系统动态特性的精确建模,并考虑到系统参数随时间或操作条件变化而变化的情况。该控制器首先利用准确的动态模型来描述无人机的行为,包括其动力学和惯性特性。然后,通过使用LPV方法,将系统的动态特性表示为系统参数的函数,这些参数可以随时间或工作条件而变化。这样,LPV控制器能够在不同工作条件下有效地调整控制策略,以适应系统参数的变化,从而提高控制性能和稳定性。模型预测控制(MPC)是LPV方法的一种实现方式,它允许控制器预测未来一段时间内系统的行为,并基于这些预测来生成最优控制输入。对于无人机,MPC可以预测未来几个时刻内的姿态、位置和速度,并生成使无人机沿预期轨迹飞行的最优控制指令。使用LPV方法的无人机模型预测控制器结合了精确的动态模型、考虑系统参数变化的能力以及模型预测控制的优势,为无人机提供了高性能、鲁棒性和适应性的控制方案,适用于各种飞行任务和环境条件。
📚2 运行结果


主函数部分代码:
%% Main file for controllering the drone
clear
close all
clc
%% Load the cons tant values
constants = initial_constants();
Ts = constants{7};
controlled_states = constants{14}; % Number of controlled states
innerDyn_length = constants{18}; % Number of inner control loop iterations
%% Generate the reference signals
t = 0 : Ts * innerDyn_length : 100;
t_angles = (0 : Ts : t(end))';
r = 2;
f = 0.025;
height_i = 5;
height_f = 25;
[X_ref, X_dot_ref, X_dot_dot_ref, Y_ref, Y_dot_ref, Y_dot_dot_ref, Z_ref, Z_dot_ref, Z_dot_dot_ref, psi_ref] = trajectory_generator(t, r, f, height_i, height_f);
plotl = length(t); % Number of outer control loop iterations
%% Load the initial state vector
ut = 0;
vt = 0;
wt = 0;
pt = 0;
qt = 0;
rt = 0;
xt = 0; % X_ref(1, 2) Initial translational position
yt = -1; % Y_ref(1, 2) Initial translational position
zt = 0; % Z_ref(1, 2) Initial translational position
phit = 0; % Initial angular position
thetat = 0; % Initial angular position
psit = psi_ref(1, 2); % Initial angular position
states = [ut, vt, wt, pt, qt, rt, xt, yt, zt, phit, thetat, psit];
states_total = states;
% Assume that first Phi_ref, Theta_ref, Psi_ref are equal to the first
% phit, thetat, psit
ref_angles_total = [phit, thetat, psit];
velocityXYZ_total = [X_dot_ref(1, 2), Y_dot_ref(1, 2), Z_dot_ref(1, 2)];
% Initial Drone state
% omega1 = 3000; % rad/s at t = -1s
% omega2 = 3000; % rad/s at t = -1s
% omega3 = 3000; % rad/s at t = -1s
% omega4 = 3000; % rad/s at t = -1s
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]郑潇,何德峰,王巧灵,等.具有输入约束和扰动补偿的四旋翼无人机姿态稳定模型预测控制[J/OL].计算机测量与控制:1-11[2024-04-27].http://kns.cnki.net/kcms/detail/11.4762.TP.20231012.1113.034.html.
[2]潘昱达. 四旋翼无人机姿态控制算法研究[D].东北石油大学,2024.DOI:10.26995/d.cnki.gdqsc.2023.000843.