Cubemx配置,注意你要记得自己选那个USART的I/O脚,因为他自己选的可能不是你要用那个
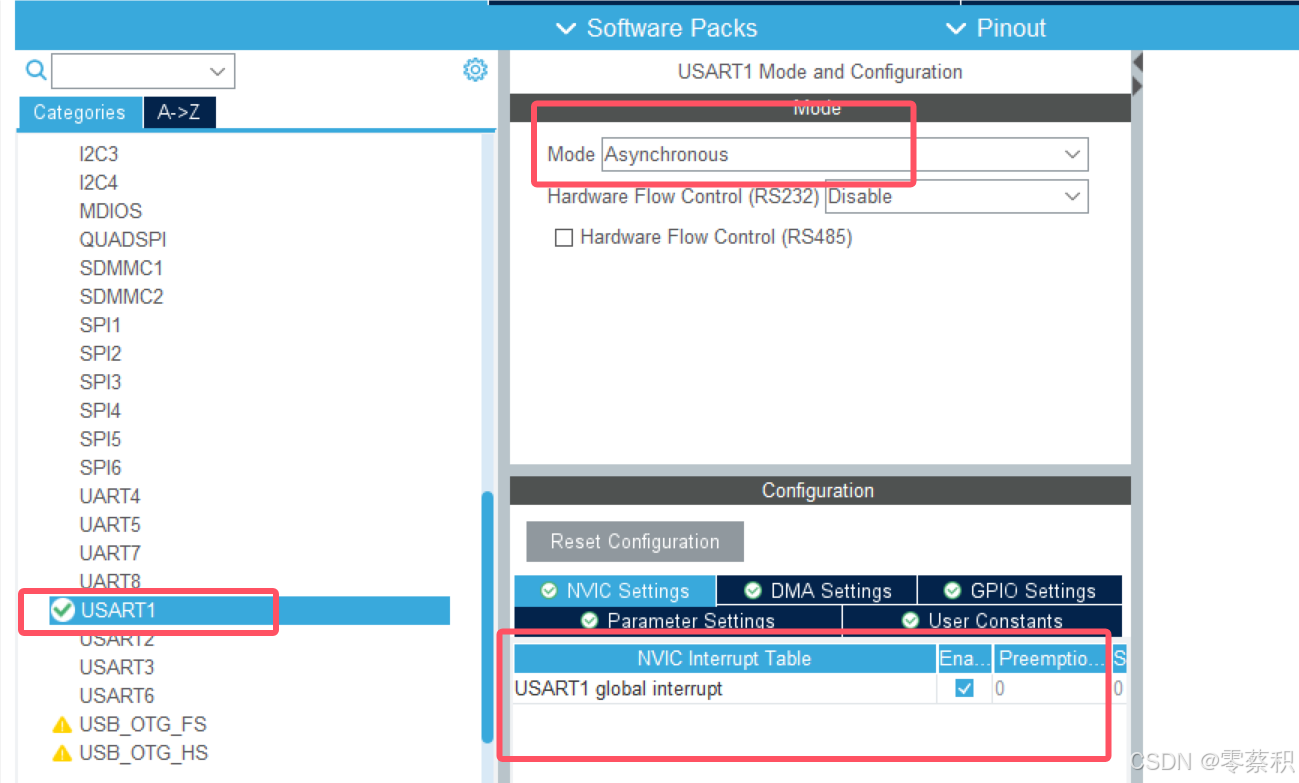
kiel配置
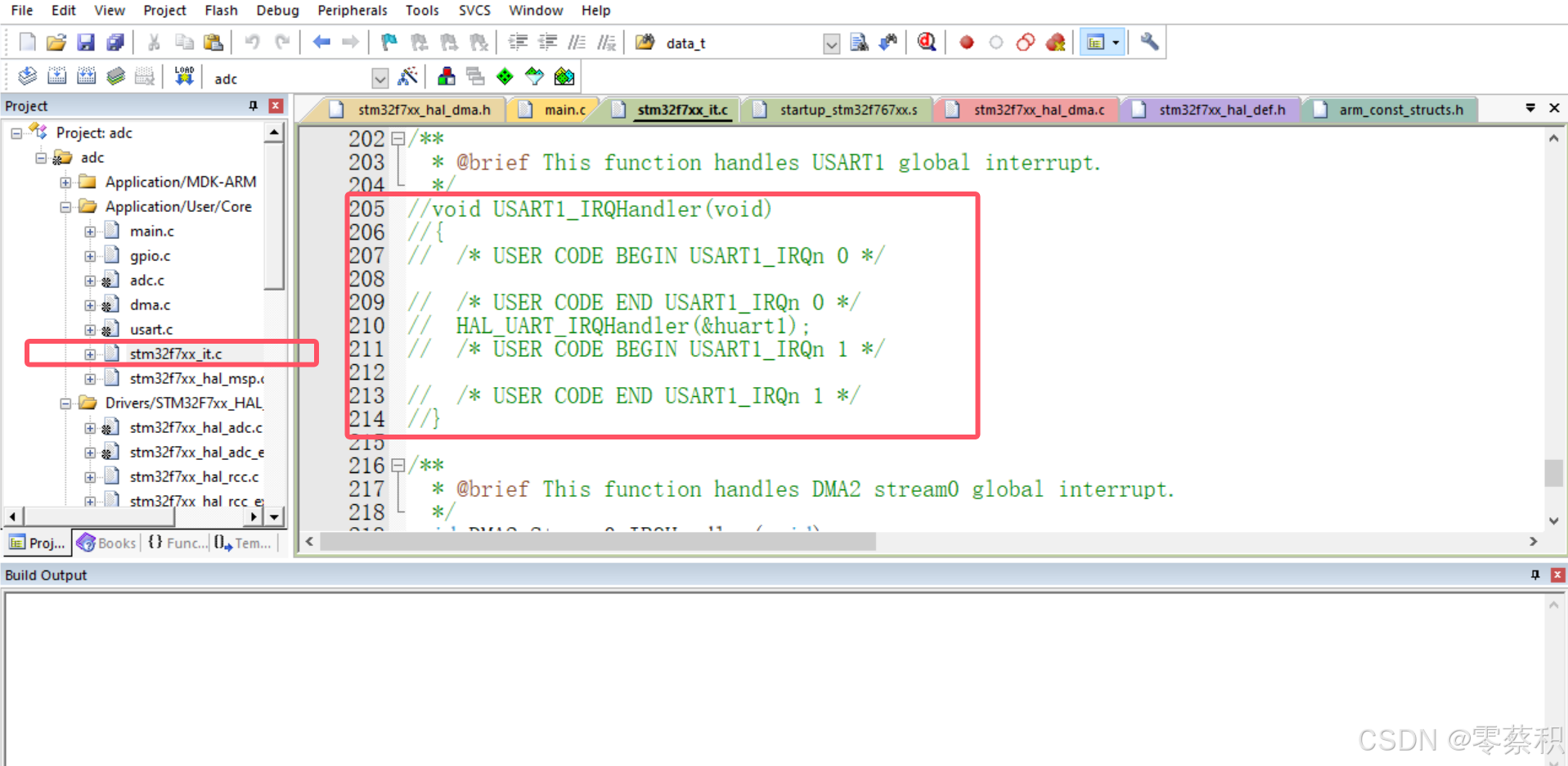
把这个自动生成的中断删了,等一下我们会自己重新写一下
main.c文件:
头文件定义
#include "stdio.h"
#include "arm_math.h"
#include "arm_const_structs.h"
#include "string.h"做好数据存放准备,设立数组
//串口接收数据定义的数组
#define USART_REC_MAX 1024 //最大接收字节数
#define RX_Buffer_size 1 //缓存大小
uint8_t USART1_RX_BUF[USART_REC_MAX];//接收缓存
volatile uint16_t USART1_RX_STA=0;//接收状态标记
uint8_t aRXBuffer1[RX_Buffer_size];//接收缓冲
uint16_t len1;//接收到的数据长度
//fft使用调用的数组
float data_in[USART_REC_MAX*2]={0};//实部和虚部,所以是两倍长度
//float data_t[USART_REC_MAX]={0};
float data_out[USART_REC_MAX/2];//输出信号
int j=0,i=-0;重定义串口发送,使用printf函数
void USART1_Printf(const char* str);
int fputc(int c,FILE*stream)
{
HAL_UART_Transmit(&huart1,(unsigned char *)&c,1,HAL_MAX_DELAY);
return 1;
}串口接收回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef* huart)
{
if(huart->Instance == USART1)
{
if ((USART1_RX_STA & 0x8000) == 0) // 接收未完成
{
// HAL_UART_Transmit(&huart1,"开始中断\r\n",strlen("开始中断\r\n"),0xffff);
if (USART1_RX_STA & 0x4000) // 接收到了0x0d
{
if (aRXBuffer1[0] != 0x0a) // 接收错误,重新开始
USART1_RX_STA = 0;
else // 接收完成了
USART1_RX_STA |= 0x8000;
}
else // 还没收到0X0D
{
if (aRXBuffer1[0] == 0x0d)
USART1_RX_STA |= 0x4000;
else
{
USART1_RX_BUF[USART1_RX_STA & 0X3FFF] = aRXBuffer1[0];
USART1_RX_STA++;
if (USART1_RX_STA > (USART_REC_MAX - 1))
USART1_RX_STA = 0; // 接收数据错误,重新开始接收
}
}
}
// HAL_UART_Receive_IT(&huart1,aRXBuffer1,RX_Buffer_size);
}
}串口中断函数
void USART1_IRQHandler(void)
{
unsigned int timeout = 0;
unsigned int maxDelay = 0x1ffff;//超时时间
HAL_UART_IRQHandler(&huart1); // 调用HAL库中断处理公用函数
timeout = 0;
while (HAL_UART_GetState(&huart1) != HAL_UART_STATE_READY) // 等待就绪
{
timeout++; // 超时处理
if (timeout > maxDelay)
break;
}
timeout = 0;
// 一次处理完成之后,重新开启中断并设置RxXferCount为1
while (HAL_UART_Receive_IT(&huart1, (unsigned char*)aRXBuffer1, RX_Buffer_size) != HAL_OK)
{
timeout++; // 超时处理
if (timeout > maxDelay)
break;
}
}main函数
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MPU Configuration--------------------------------------------------------*/
MPU_Config();
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
MX_ADC1_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
HAL_ADC_Start_DMA(&hadc1,(uint32_t*)AdcRes,6);//6:字节
HAL_UART_Receive_IT(&huart1, (unsigned char*)aRXBuffer1, RX_Buffer_size);
while (1)
{
if(USART1_RX_STA & 0x8000)//判断是否有回车换行
{
len1=USART1_RX_STA & 0x3fff;
USART1_RX_STA=0;
// memset(data_in, 0, sizeof(data_in));
for(j=0;j<USART_REC_MAX;j++)
{
data_in[j*2]=(float)USART1_RX_BUF[j];//实部
data_in[j*2+1]=0;//虚部
}
//调用FFT进行计算
arm_cfft_f32(&arm_cfft_sR_f32_len1024,data_in,0,1);
//将复数数据转换为实数,取模
arm_cmplx_mag_f32(data_in,data_out,len1/2);
for(i=0;i<512;i++)
{
//printf("hello");
printf("%f\r\n",data_out[i]/512);
}
HAL_Delay(10000);
memset(USART1_RX_BUF, 0, len1);
}
}
}
最后说一下,如果你的fft得出来的数据全部都是很大的数,那是错的。。。。。。