柏林噪声与MC
引入
暑假入门Unity后打算做一个类MC的游戏。大家都知道,MC地形几乎是“无限”生成的(实际上有一个特别大的上限值),人工制作如此庞大的地图必然不现实,内存也无法容纳这么多方块。因此,地形的生成必须得依靠算法实时计算,计算后加载玩家附近的区块,并将结果渲染在画面中。
在MC中,各种地形是比较贴近自然的,那么它具体是依靠怎样的算法生成的呢?其中一个核心就是柏林噪声。
简介
柏林噪声 ( Perlin noise )指由Ken Perlin发明的自然噪声生成算法。它是一个非常常见的游戏开发技术,主要用于随机地图的生成。
噪声(Noise) 实际上就是一个随机数生成器,当然,这是一种伪随机(现实世界中的真随机在计算机中不存在)。我们所看到的那些黑白噪声图,实际上是随机数映射到0和1之间产生的灰度图。随机本身就是不同,那为什么还需要不同的随机?
普通噪声(随机数生成器)的问题在于,它实在太过于随机,毫无规律可言。曾经我尝试过在制作的游戏中用随机数生成地形,得到了如下的结果:

我们可以发现,用随机数生成的地形起伏非常大,高度非常离散,毫无规律可言,这显然无法达到我们的预期。
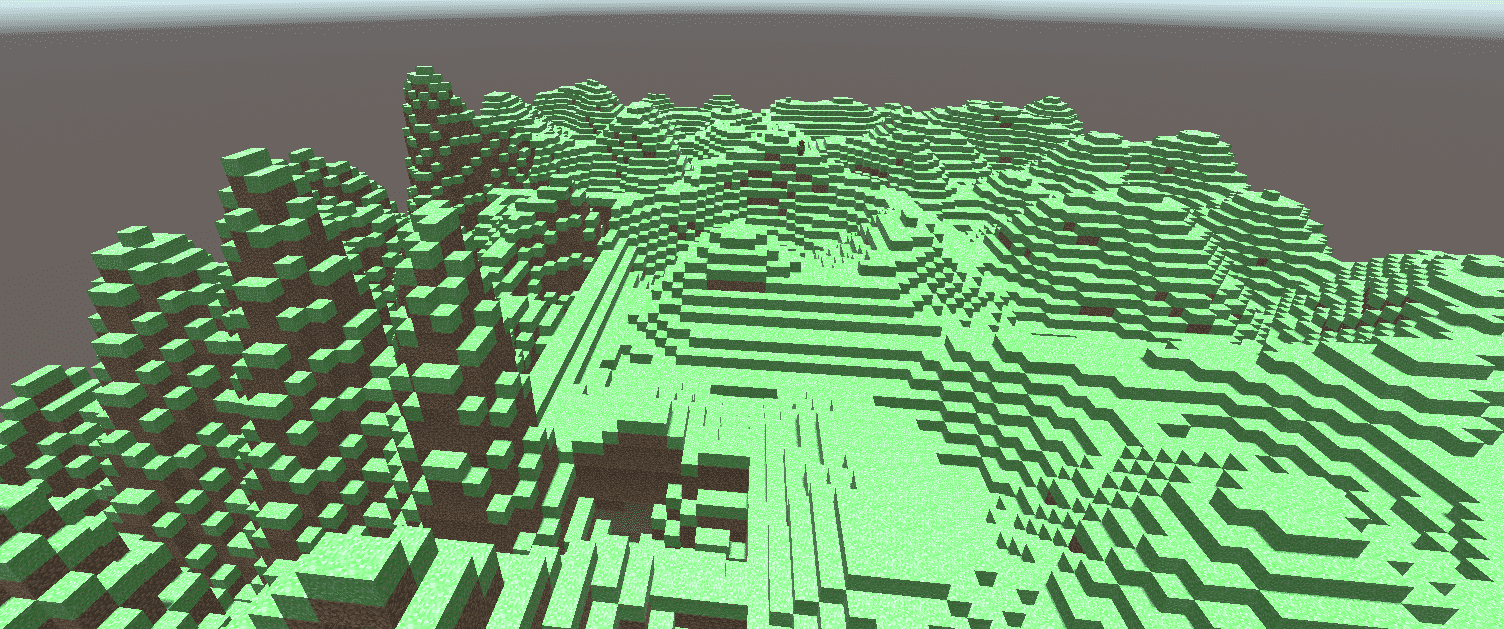
柏林噪声基于随机,并在此基础上利用缓动曲线进行平滑插值,使得最终得到噪声效果更加趋于自然。那柏林噪声的表现又如何呢?我们来看看下面这张图:
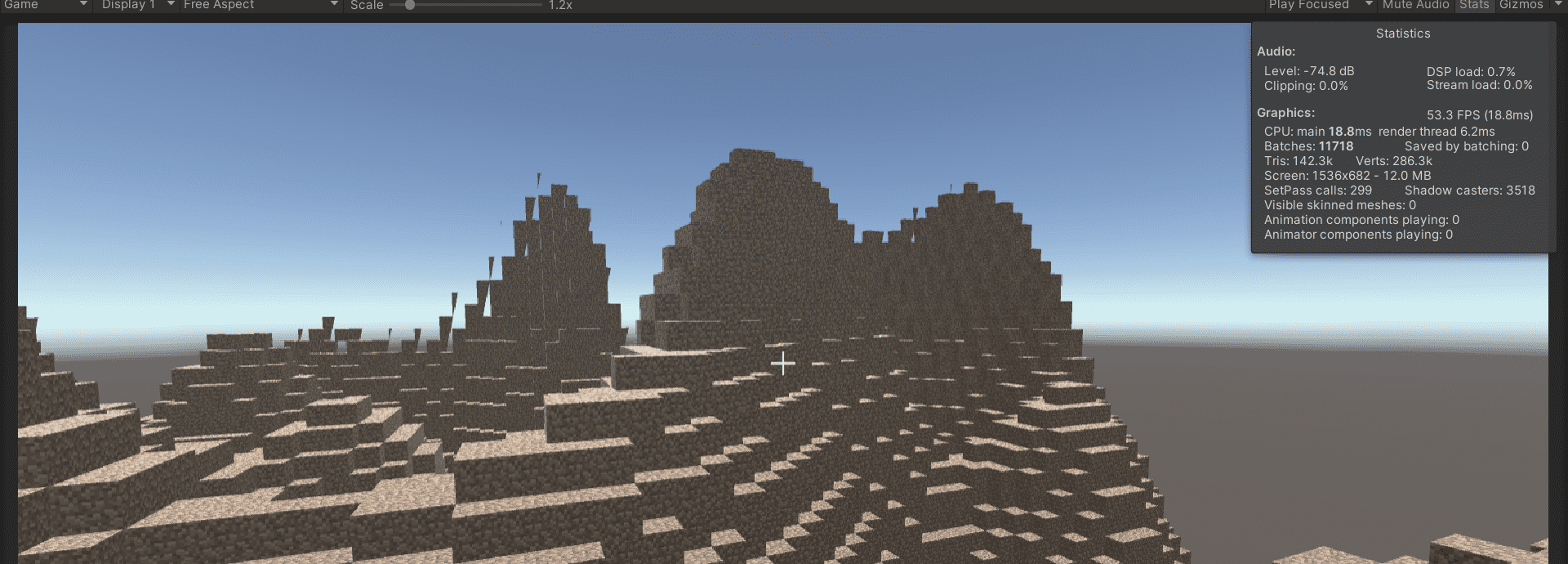
这是我自己用柏林噪声实现的地形,我们可以发现,地形已经变得比较连续/平滑了,效果很Nice!
算法
实现步骤
基于不同的采样空间,柏林噪声可以分为一维、二维和三维,不同维度的算法都很类似,主要经过以下三个步骤:
- 初始化相关数据,包括排列表(Permutation Table) 和 梯度表(Gradient Table) 等,其中梯度表中元素绝对值的max一般是1;
- 建立采样空间和参考点。对于一维柏林噪声,采样空间为一个一维的坐标轴,轴上整数坐标位置均有一个点。而对应二维柏林噪声,采样空间为一个二维坐标系,坐标系中横纵坐标为整数的地方均有参考点。三维柏林噪声同理。根据步骤一的两个表格对每一个整数坐标点计算它们的伪随机梯度,该梯度的维数和采样空间维数相同;
- 对于噪声图上的像素,找到它在晶格上对应的一点,并求出它的参考点的坐标。在一维情况下,参考点为两侧最近的整数点;二维情况下,参考点为组成包围该点的单位正方体的四个点;三维情况下,参考点为组成包围该点的单位立方体的八个点。
- 对于不同类型的噪声,对采样点在不同空间中,根据最近的参考点的梯度和缓动曲线进行插值计算。
步骤一的意义
首先谈谈为什么要在步骤一生成排列表和梯度表。排列表是一个乱序存放一系列索引值的表,而梯度表是一个存放了一系列随机梯度值的表,两者都具有很强的随机性。在决定一个点的梯度时,需要结合哈希函数,以点的坐标为参数,利用所得的值作为索引,去排列表中取对应的值。所取得的排列表中的值,就是该点在梯度表中对应梯度值的索引。这样解释可能会有些让人摸不着头脑,我们来看一段伪代码。
// 排列表 存放着随机生成的一组数据
int[] perm = {...};
// 梯度表 存放着随机生成的一组数据 一般限定范围是[-1,1]
float[] grad = {...};
// 只有整数点才需要随机指定梯度,以计算非整数点的插值
// 注:ref为C#语法 相当于C++的引用类型
void Hash(ref int[] gradient, int x, int y) {
// 通过哈希函数找到排列表的索引
int permIdx[] = new int[2];
permIdx[0] = FindIndex(x);
permIdx[1] = FindIndex(y);
// 通过排列表索引找到梯度表的索引
int gradIdx[] = new int[2];
gradIdx[0] = perm[permIdx[0]];
gradIdx[1] = perm[permIdx[1]];
// 在梯度表中找到梯度值 得到了点(x,y)的梯度值
gradient[0] = grad[gradIdx[0]];
gradient[1] = grad[gradIdx[1]];
}
这段代码是针对二维柏林噪声的梯度生成方法,通过函数Hash可以得到整数点(x,y) 的梯度值,可能大家比较疑惑,为什么不直接使用快捷的random函数生成随机梯度值呢?因为random的返回值是和调用次数相关的,但是我们希望在每次调用同一个点都能得到相同的梯度值,random就不满足我们的需求了。而建立一个排列表和梯度表能够实现以上要求。
一维柏林噪声
先谈谈最简单的一维情况,下面这张图中,一维的轴是x轴(水平),柏林噪声输出值为y轴(竖直)。我们以两个整数采样点为一个单元,也就是 A ( x A ) , B ( x B ) ( 满足 x A , x B ∈ Z , x B − x A = 1 ) A(x_A),B(x_B)(满足x_A,x_B\in Z,x_B-x_A=1) A(xA),B(xB)(满足xA,xB∈Z,xB−xA=1) 。
而我们待计算的点是 X ( x ) X(x) X(x) (即X点的横坐标为x)。

经过步骤一和步骤二,假设两点的随机初始化梯度(维数为1)分别是 A D ⃗ = ( 0.3 ) B E ⃗ = ( − 0.1 ) \vec{AD}=(0.3) \ \vec{BE}=(-0.1) AD=(0.3) BE=(−0.1) ,并且你已经完成步骤三:找到了 X X X 点附近的整数点 A , B A,B A,B 。如何进行步骤四的插值呢?柏林想到用点积将点 A , X , B A,X,B A,X,B 三个点关联起来:
-
计算向量 A X ⃗ 和 B X ⃗ 的大小,在这里是 A X ⃗ = ( x − x A ) B X ⃗ = ( x − x B ) 计算向量\vec{AX} 和 \vec{BX} 的大小,在这里是\vec{AX}=(x-x_A) \ \vec{BX}=(x-x_B) 计算向量AX和BX的大小,在这里是AX=(x−xA) BX=(x−xB)
-
将 A X ⃗ \vec{AX} AX 和 随机初始化的 A D ⃗ \vec{AD} AD 做点积得到 d o t 1 dot_1 dot1; B X ⃗ \vec{BX} BX 和随机初始化的 B E ⃗ \vec{BE} BE 做点积得到 d o t 2 dot_2 dot2
-
根据 d o t 1 和 d o t 2 dot_1和dot_2 dot1和dot2 计算X点的输出值,在图中也就是 y F = d o t 1 + k ∗ ( d o t 2 − d o t 1 ) , 其中 k = f ( x − x A ) , f 为缓动曲线 , f 一般取 f ( t ) = 3 t 2 − 2 t 3 或 f ( t ) = 6 t 5 − 15 t 4 + 10 t 3 y_F=dot_1+k*(dot_2-dot_1),其中k=f(x-x_A),f为缓动曲线,f一般取f(t)=3t^2-2t^3 或 f(t)=6t^5-15t^4+10t^3 yF=dot1+k∗(dot2−dot1),其中k=f(x−xA),f为缓动曲线,f一般取f(t)=3t2−2t3或f(t)=6t5−15t4+10t3
于是得到了上图中紫色曲线的效果,以上就是一个单元的计算方法
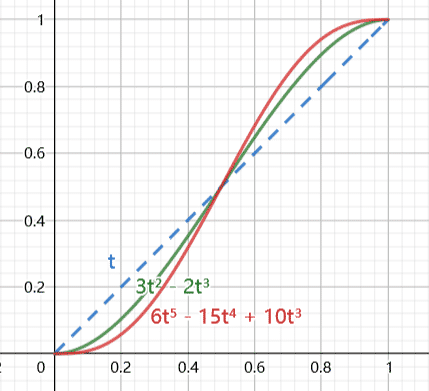
我们为什么要加入缓动曲线呢?缓动曲线是为了增加结果的光滑性,我们来看看两个缓动曲线与正比例函数 f ( t ) = t f(t)=t f(t)=t 的对比图:(0<x<1)
将多个单元连起来,就形成了以下结果(下图横轴中每一个绿点代表一个整数)
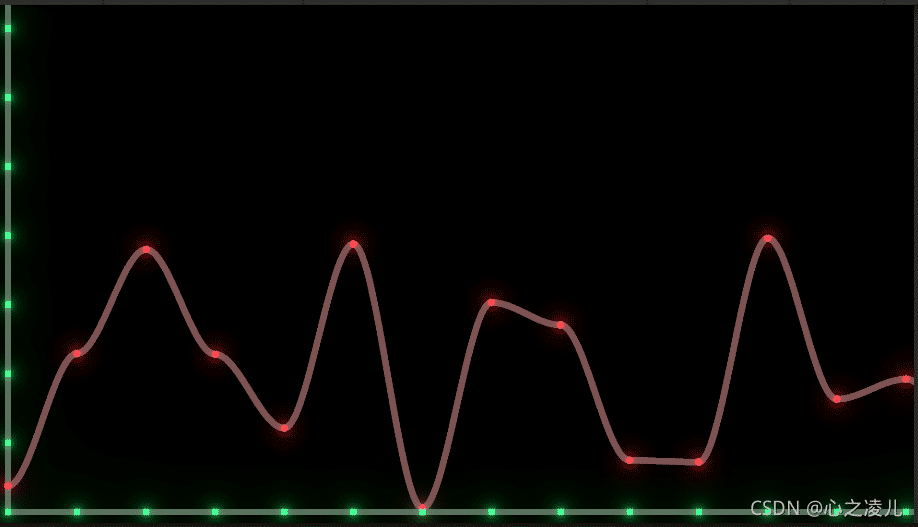
最后,如果梯度表中元素绝对值的max为1,一维柏林噪声返回值的范围应该是[-1,1],感兴趣的小伙伴可以估计一下。
二维柏林噪声
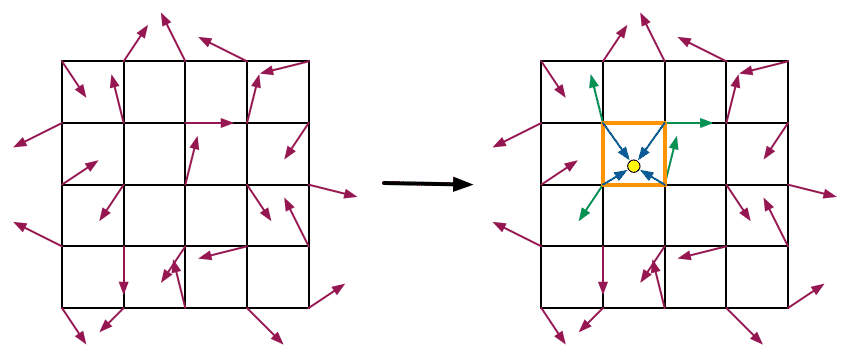
二维柏林噪声需要横/纵坐标,我们可以把输出视作”高度“。如下面的左图,每个小正方形的顶点就是一个整数点,计算柏林噪声的单元就是一个小正方形了(比如下方右图橘黄色标注部分)一维柏林噪声只需要初始化一条线上整数点的梯度,二维则需要计算一个面上整数点的梯度,并且初始化梯度维数为2。
梯度初始化完成后,就要进行插值计算了。二维柏林噪声方法与一维差别不大,大家可以和之前提到的一维柏林噪声插值计算的步骤对比。参考下图,设一个正方形单元的四个顶点分别是 P 0 , P 1 , P 2 , P 3 P_0,P_1,P_2,P_3 P0,P1,P2,P3 ,待求柏林噪声的点是 P ( x , y ) P(x,y) P(x,y) ,那么计算方法可以是以下步骤(字母遵循下图):

-
计算向量 P 0 P ⃗ , P 1 P ⃗ , P 2 P ⃗ , P 3 P ⃗ \vec{P_0P},\vec{P_1P},\vec{P_2P},\vec{P_3P} P0P,P1P,P2P,P3P 的大小,记作 v 0 , v 1 , v 2 , v 3 v_0,v_1,v_2,v_3 v0,v1,v2,v3
-
将 P i P ⃗ \vec{P_iP} PiP 和在 P i P_i Pi随机初始化的 g r a d i ⃗ \vec{grad_i} gradi 做点积得到 Z i Z_i Zi (其中i取遍0,1,2,3);
-
插值计算:根据点积结果 Z 0 , Z 3 Z_0,Z_3 Z0,Z3 插值得到 Z 03 = Z 0 − t 0 ∗ ( Z 3 − Z 0 ) Z_{03}=Z_0-t_0*(Z_3-Z_0) Z03=Z0−t0∗(Z3−Z0), Z 1 , Z 2 Z_1,Z_2 Z1,Z2 插值得到 Z 12 Z_{12} Z12 ,其中, t 0 t_0 t0 由缓动曲线 f ( x − x 0 ) f(x-x_0) f(x−x0) 给出。这两次插值相当于在y方向上进行一维插值,得到 P 03 和 P 12 P_{03}和P_{12} P03和P12 的高度;借助这两点,我们又可以继续在x方向进行插值。得到P的柏林噪声值(高度) Z = Z 03 − t 1 ∗ ( Z 12 − Z 03 ) Z=Z_{03}-t_1*(Z_{12}-Z_{03}) Z=Z03−t1∗(Z12−Z03) ,其中, t 1 t_1 t1 由缓动曲线 f ( y − y 0 ) f(y-y_0) f(y−y0) 给出。因此,一个点总共会计算3次插值。
这样以后,就可以在每一个正方形单元都进行计算,对每一个点得到其柏林噪声(代表着它们的高度值),于是得到了上图中连续曲面的效果,下面附上计算过程的动图:
MC中一个正方形单元是一个区块(chunk),一个区块边长为16个方块,所以在计算时得把结果除以16。这是我的随机地形生成结果:
遗留问题
二维的概念不易理解,我在实现算法时遇到了很多问题。例如:
-
在二维柏林噪声的动图演示中,它首先计算了y轴方向的 P 0 和 P 3 P_0和P_3 P0和P3 , P 1 和 P 2 P_1和P_2 P1和P2。但是如果先计算x轴方向的 P 0 和 P 1 P_0和P_1 P0和P1, P 2 和 P 3 P_2和P_3 P2和P3 ,再用 P 01 和 P 23 P_{01}和P_{23} P01和P23 进行插值,两个方式得出的结果是一样的吗,如何证明? 我认为结果一样,但是找不到优雅的证法;
-
在一个正方形晶格内部,曲面方程 s ( x , y ) s(x,y) s(x,y) 肯定是关于x,y的幂函数,因而对于曲面内的任意一点,必然处处连续可微,但是在正方形边界的情况呢?有连续性吗?有可微性吗?
期待大家的答案!
三维柏林噪声
一维进行了1次插值,二维进行了3 ( KaTeX parse error: Undefined control sequence: \* at position 3: =2\̲*̲1+1 )次插值,那么以此类推,三维应该进行 KaTeX parse error: Undefined control sequence: \* at position 3: (2\̲*̲3+1)=7 次插值。步骤类似,下面就不一一列出,为大家附一张计算图:

效果展示
Unity中自带有二维柏林噪声函数:Mathf.PerlinNoise(float x,float y) 输入参数为浮点坐标
(
x
,
y
)
(x,y)
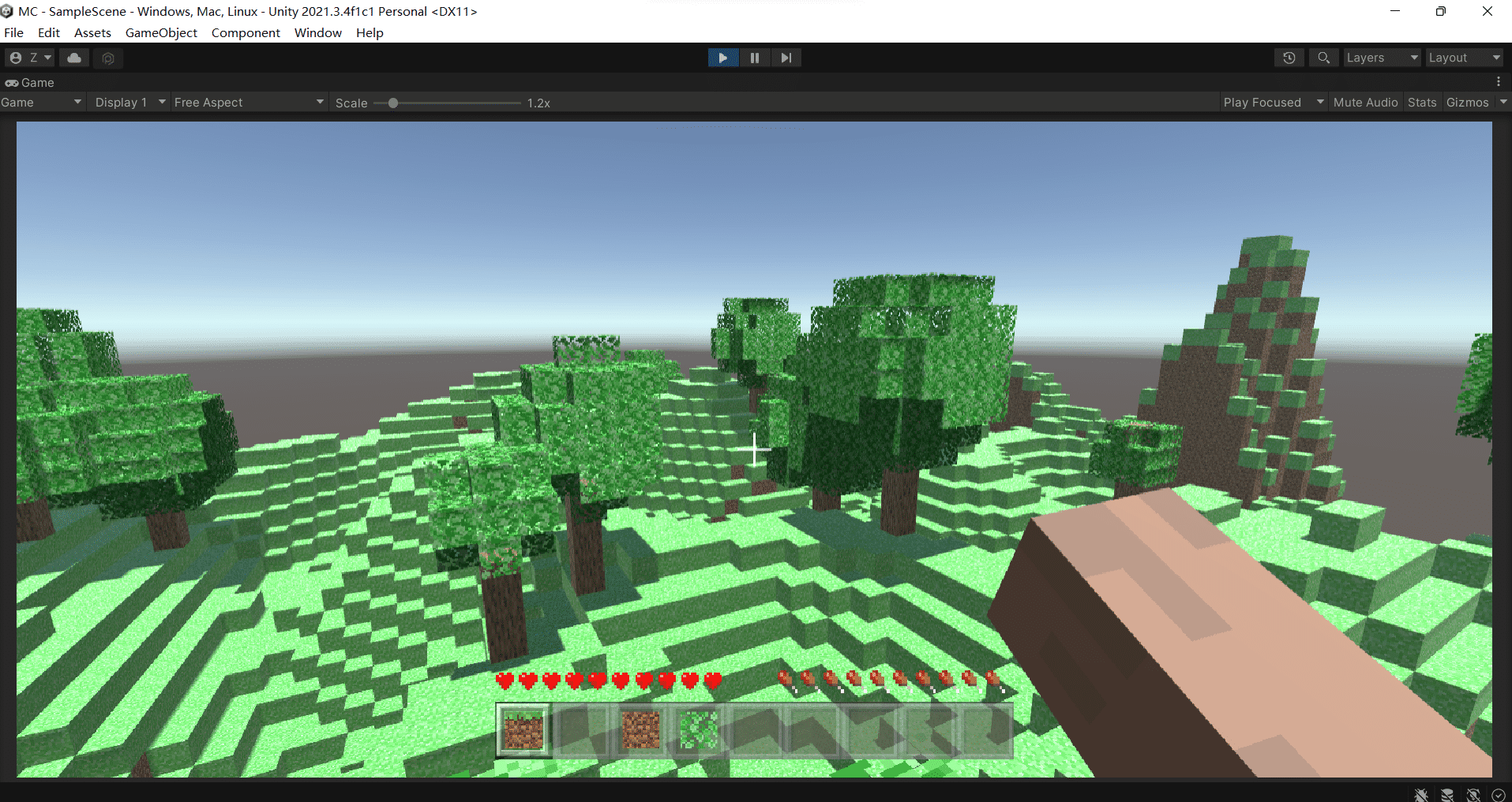
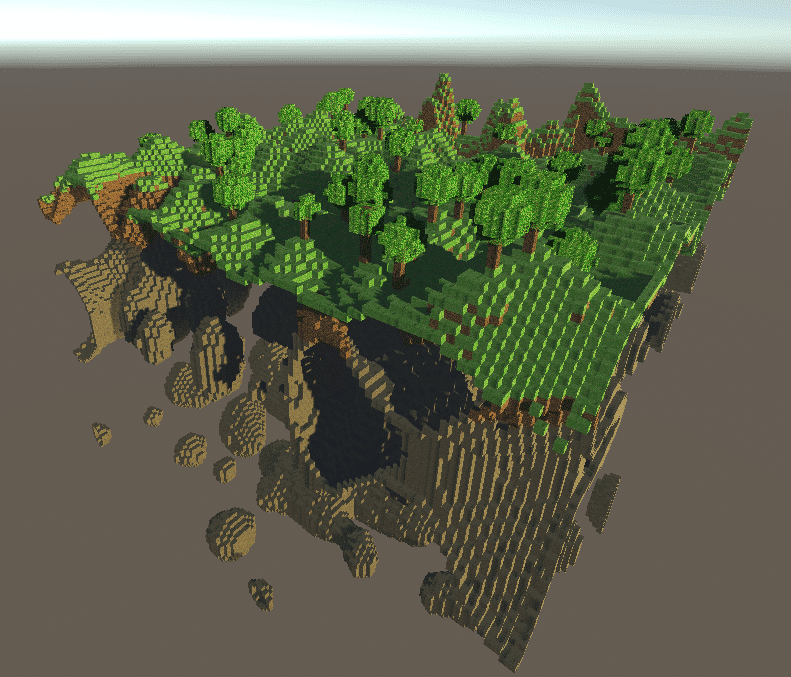
(x,y) ,返回二维柏林噪声得出的结果,该结果绝大多数情况范围是[0,1]。我自己写的柏林噪声函数算法偏慢,所以我直接使用了Unity自带的柏林噪声函数,并且加入了伪随机生成树木的算法,看起来还是比较像原版MC的 😃
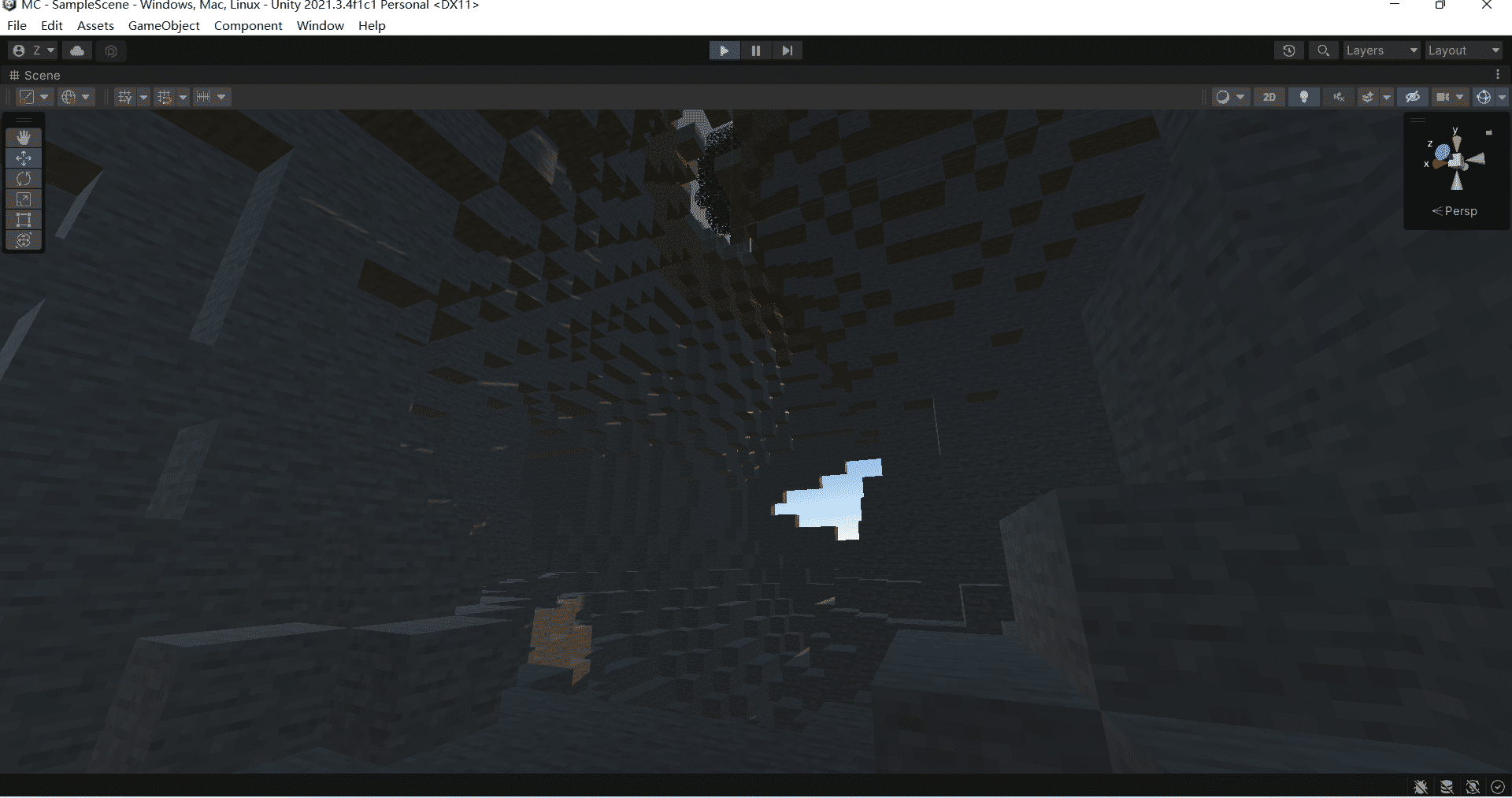
然后加入了矿洞生成算法,因为Unity没有提供三维的柏林噪声函数,所以我想了个歪招:对于每个方块 ( x , y , z ) (x,y,z) (x,y,z),计算三次二维柏林噪声:
float result = Mathf.PerlinNoise(x,y) + Mathf.PerlinNoise(y,z) + Mathf.PerlinNoise(z,x);
根据result的结果判定是否生成矿洞,以下是矿洞的一部分:
全貌长这样,随机地图会随着玩家位置更新
参考
[1] https://zhuanlan.zhihu.com/p/206271895
[2] 理解柏林噪声_Liukairui的博客-CSDN博客_柏林噪声