myController S570 具有较高的数据采集速度和远程控制能力,大大简化了人形机器人的编程。
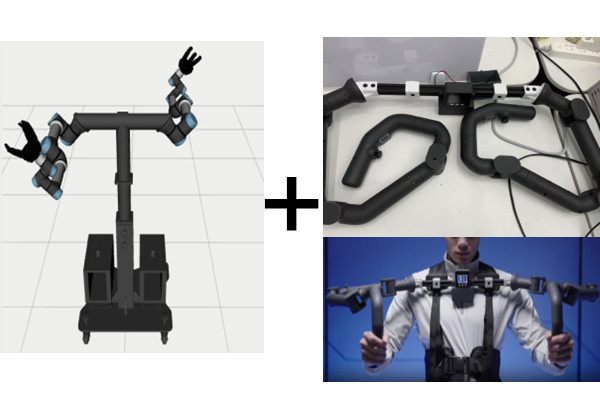
myController S570 是一款可移动的轻量级外骨骼,具有 14 个关节、2 个操纵杆和 2 个按钮,它提供高数据采集速度,出色的兼容性,与各种广泛使用的协作机器人无缝集成,并支持多种开发环境。它非常适合无人任务的远程操作和数据采集,使其成为工业自动化、工作站任务和人形机器人控制的理想工具。
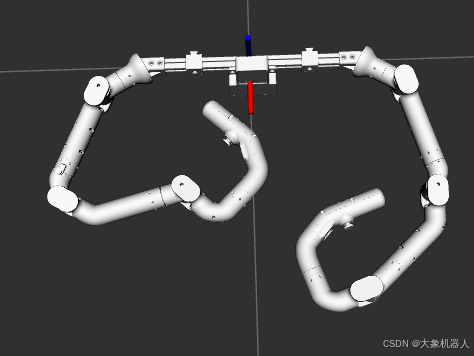
本文使用 UR5 双臂实现快速直观的远程控制案例。
引言
对人形机器人的兴趣日益浓厚,推动了对双臂协作机器人开发的需求。由于双臂机器人需要同时控制超过 12 个自由度来执行任务,因此它们在实际应用中需要算法支持。
优傲机器人 (UR) 拥有重要的市场份额,许多工作站使用 UR5 和 UR10 进行双臂设置。通过使用 myController S570,我们可以轻松 构建一个远程操作项目,而无需任何算法支持。
通过佩戴 myController S570,用户可以控制机器人执行符合人类操作习惯的任务,大大简化了机器人的运动示教和数据采集。这种方法为测量、救援和各种无人操作等应用提供了巨大的优势。
myController S570 的参考资料
myController S570 是一款与各种机器人高度兼容的数据采集设备。它传输 14 个关节、2 个摇杆和 2 个按钮的实时数据,通过 PC.It 实现对真实机器人的控制,涵盖数据收集、远程操作和端到端应用程序开发等场景。
- 数据采集速度快:数据采集速度高达 100Hz,确保可靠的端到端 AI 数据采集和动作捕捉。
- 兼容性强:可轻松与各种结构的机器人集成,甚至可以控制夹持器或轮式机器人等配件。
- 机器人远程操作的优势:凭借标准的 Python 库和 ROS 支持,它提供蓝牙和 Wi-Fi 连接,使机器人远程控制即使初学者也能轻松上手。

佩戴外骨骼
构建项目的步骤
使用 Exoskeleton 在 ROS 中快速控制 UR5 双臂
此示例基于 Ubuntu 20.04 + ROS Noetic + Miniconda 构建,具有 Python 3.8 虚拟环境。
为避免未解决的错误,请根据指定要求设置项目。
1. 创建 ROS Python 3.8 虚拟环境
请先安装 Miniconda 并激活 Base 环境。
请先安装 Miniconda 并激活 Base 环境。
bash
conda create --name ros_py38 python=3.8
conda activate ros_py38
pip install pyqt5 catkin_pkg rospkg empy2. 构建 ROS 工作区,然后克隆第三方和主项目
bash
cd ~
mkdir myController_ws && mkdir myController_ws/src && cd myController_ws/src
git clone https://github.com/THU-DA-Robotics/Universal_Robots_ROS_Driver.git
git clone -b noetic_devel https://github.com/THU-DA-Robotics/robotiq.git
git clone https://github.com/THU-DA-Robotics/dual_ur.git
git clone -b mycontroller_s570 https://github.com/elephantrobotics/mycobot_ros.git3. Catkin_make 和 Open Rviz
bash
cd ..
catkin_make
source devel/setup.bash
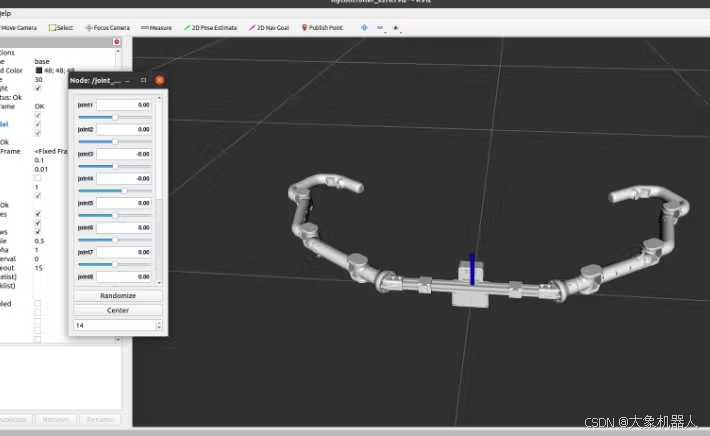
roslaunch mycontroller_s570 test.launch您将在 rviz 中看到 myController S570 外骨骼模型。
4. 将 myController S570 连接到 PC。
请遵循 gitbook。

5. 检查序列号和测试数据传输
bash
conda activate ros_py38
( you can add this line to ~/.bashrc to avoid repeated operations )
ls /dev/tty*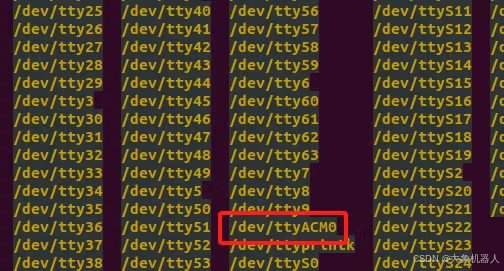
cd /home/u184/controller_ws/src/mycobot_ros/mycontroller_s570/scripts
gedit test.py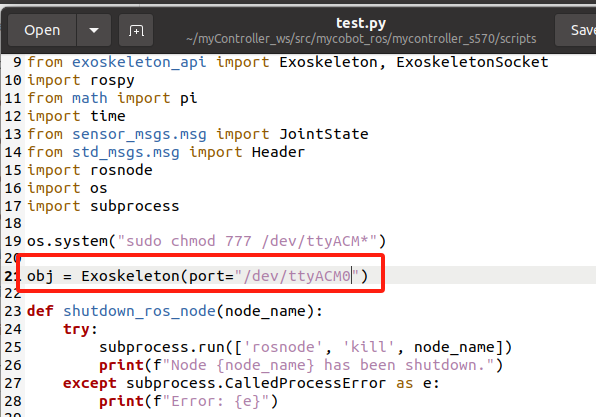
关闭 Gedit,创建一个新终端来运行脚本。
bash
conda acitivate ros_py38
cd /home/u184/controller_ws/src/mycobot_ros/mycontroller_s570/scripts
python3 test.py您将看到 Rviz 中的外骨骼模型与真实模型一起移动。
6. 在 Rviz 中控制 UR5 双臂
在这部分步骤中,我们应该修改机器人启动 Rviz 的启动文件,调整节点名称、消息类型等,使机器人模型的关节变换信息与 myController S570 发布的消息相匹配。
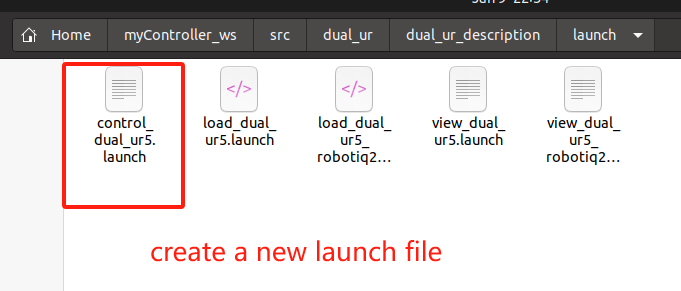
6.1 创建新的启动文件
( 您可以从文章附件下载此文件。

6.2 修改 Pyhon 脚本以确保 Joints 名称正确
( 您可以从文章附件下载此文件。
6.3 打开 2 个新端子以测试双臂机器人控制
打开一个终端以启动 rviz。
bash
conda activate ros_py38
cd ~/controller_ws
source devel/setup.sh
roslaunch dual_ur_description control_dual_ur5.launch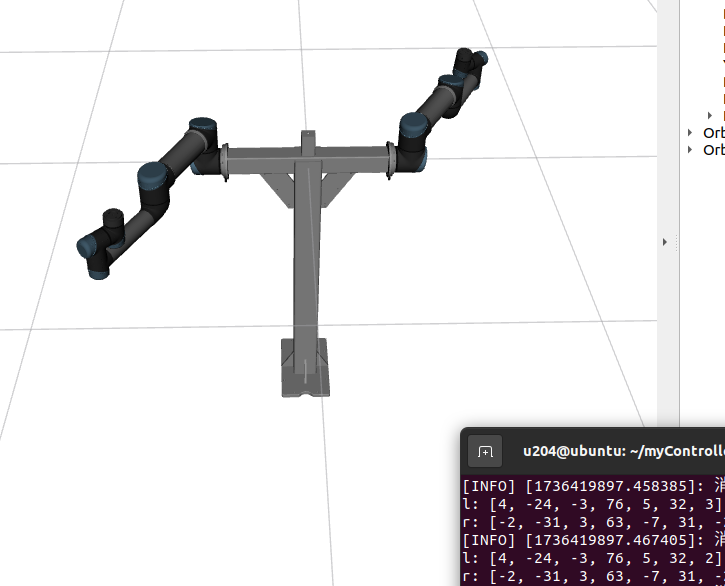
打开另一个终端以运行 test.py 以启动外骨骼并测试运动控制。
bash
conda activate ros_py38
cd /home/u204/myController_ws/src/mycobot_ros/mycontroller_s570/scripts
python3 test.py
二次开发展望
要将此演示连接到真实机器人进行测试,您应该参考 dual-arm-robotq 项目的另一位作者的 wiki。
如果使用其他机器人执行仿真任务,可以参考本项目中与 myController S570 安装和启动文件修改相关的相同步骤。在开发过程中,应考虑以下几点:
- 冗余自由度处理。
- 根据 DH 模型,调整外骨骼控制器和机器人之间的关节角度映射。
总结
可穿戴外骨骼在高兼容性和人体动作捕捉方面具有优势。它能够从关节 J1 到 J14 进行高速数据采集,并在电子屏幕上显示实时传感器反馈,为无人任务的开发做出了重大贡献。
有关 myController S570 外骨骼开发和应用的查询,请随时与我们联系。我们欢迎进一步探索远程操作和开发用例。