引子
现在是2024年1月18号晚上零点半,电路工数等困难科目已经考完,只是剩一门马原
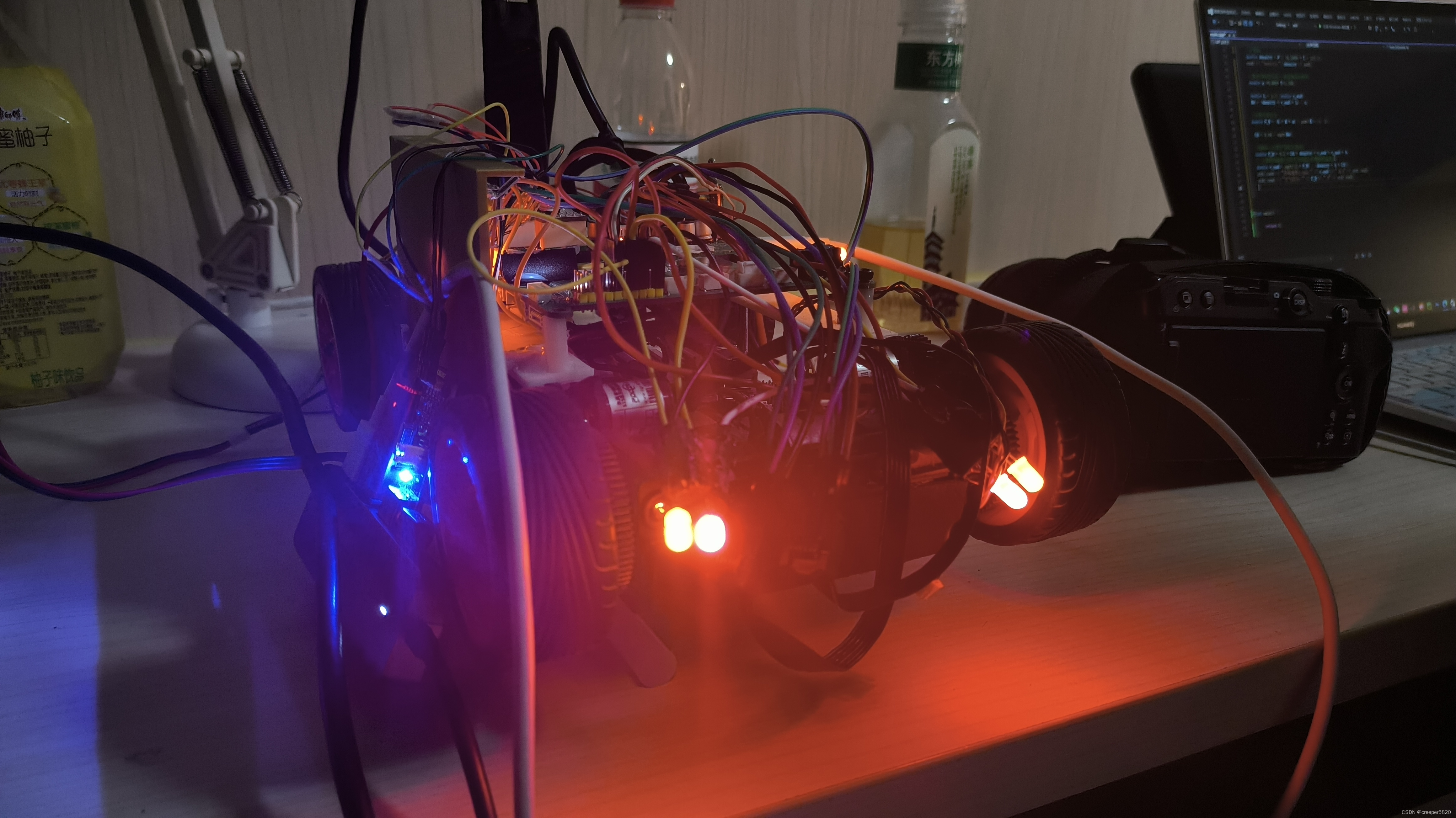
临近寒假的这一段时间颇为闲暇,于是在工作室寻得一些 M2006无刷电机和 C610电调 ,加上手头上的 C板,试着组一台个人未来比赛用的四驱底盘
依据大疆资料来看,电调需要使用CAN通信来控制,正中知识盲区,于是放下手中的马原教材(其实根本没有拿起来过),学习一下CAN
环境准备
前置知识
- STM32CubeMX的使用
- 一定的C语言使用经验
软件环境
- 代码生成
STM32CubeMX(以HAL库为基础) - 编译工具
arm-none-eabi工具链(使用其他编译器亦可) - 编写环境
VSCode+Embedded IDE(Keil和CubeIDE亦可) - 调试工具
Ozone(本篇仅以此方法调试)
硬件环境
- 主控芯片
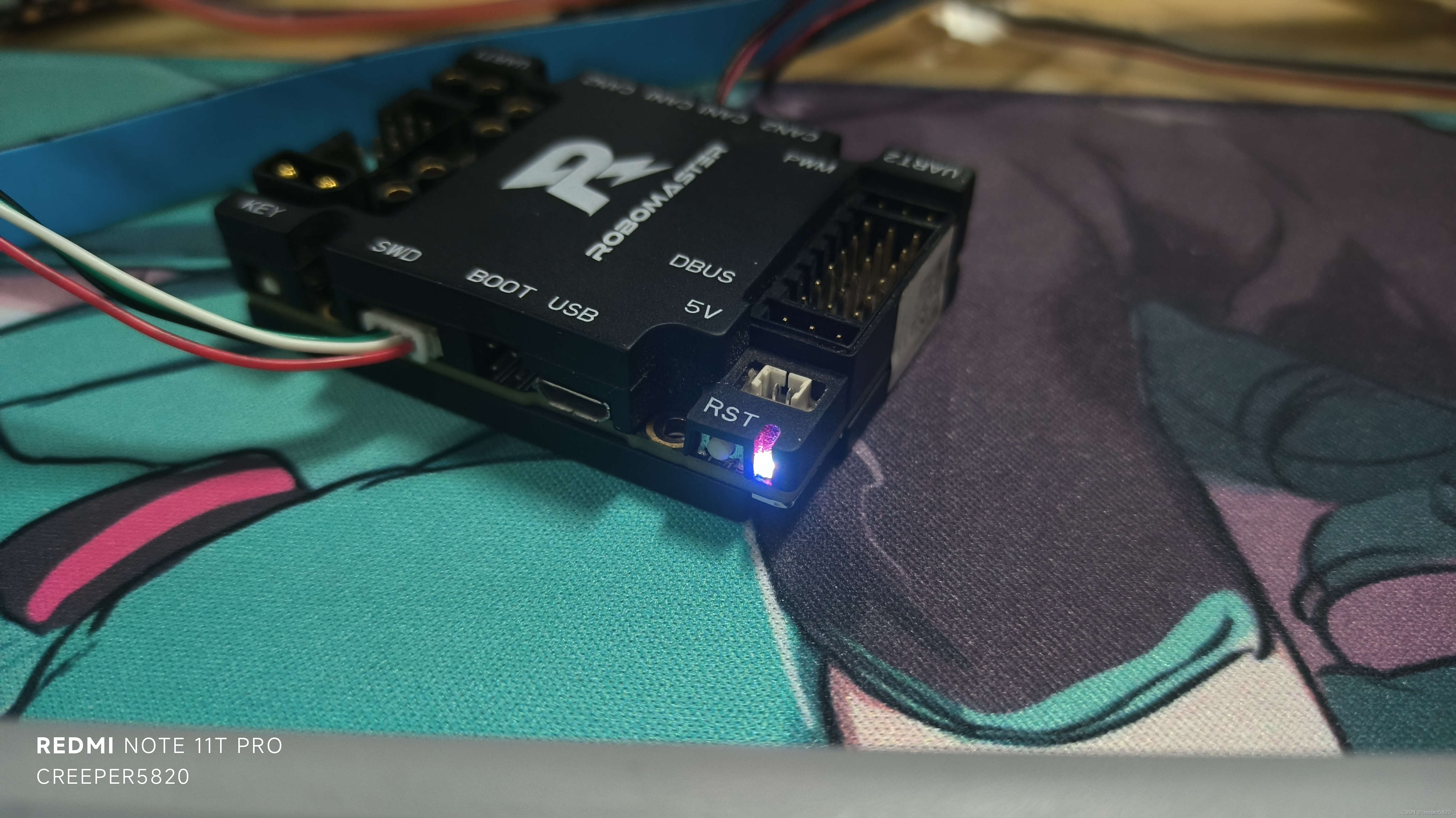
大疆C板-STM32F407IGH6 - 烧录工具
JLink - 通讯目标
C610电调
设备文档
CAN的印象
何为CAN?
在查阅了很多资料后,我提取了几个关键词:总线结构,串行通讯,标准协议,只需要两条线,即可解决沿途中设备的通信需求,例如,使用一块主控板加上CAN总线就可以很轻松的控制多个电机,极大缓解了布线带给我们的焦虑
至于书面,准确,乃至于繁缛的官方定义,我便不写入文章里,百度看看就好
CAN的硬件组成
我们可以称一个通讯单元为节点,一个节点一般有三个部分:微控制器, CAN控制器,CAN收发器,总线两端须串上120Ω的电阻,以模拟无限远传输线的特性阻抗,通过开关等手段来选择是否使用这个电阻
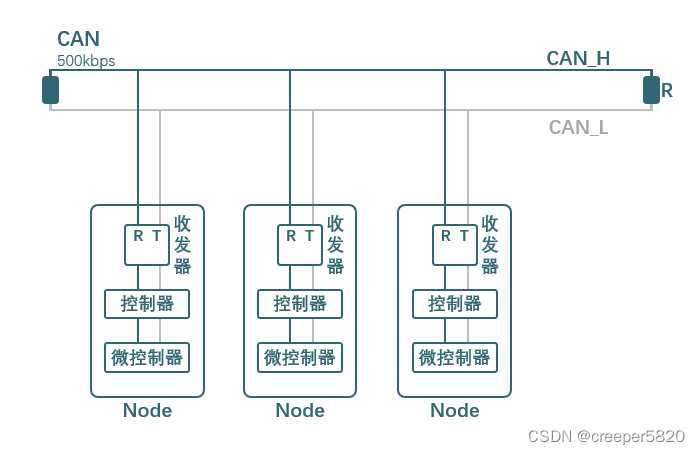
STM32芯片会自带CAN外设拓展,名为bxCAN (Basic Extended CAN - 基本拓展CAN),详细内容此处不展开
要注意,一般的STM32开发板是不带有CAN收发器的,需要自己另外购买,大疆C板是自带CAN收发器的,所以可以直接使用
CAN的回环测试
姑且暂停理论部分的讲解,繁杂的原理总是令人头大,使人望而却步,我们先启动开发软件,走通一个通讯的流程,再来细细分析其中的缘由,或者跳过理论,只掌握软件层的流程也是可以的
基本步骤:配置STM32CubeMX > 配置CAN过滤器 > 发送接收报文
配置STM32CubeMX
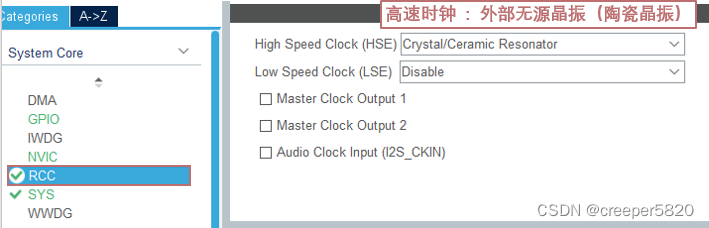
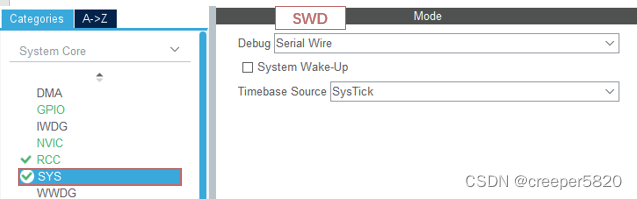
启动CubeMX,选好芯片类型创建项目,首先把常规设置搞定
关于C板的一些注意点
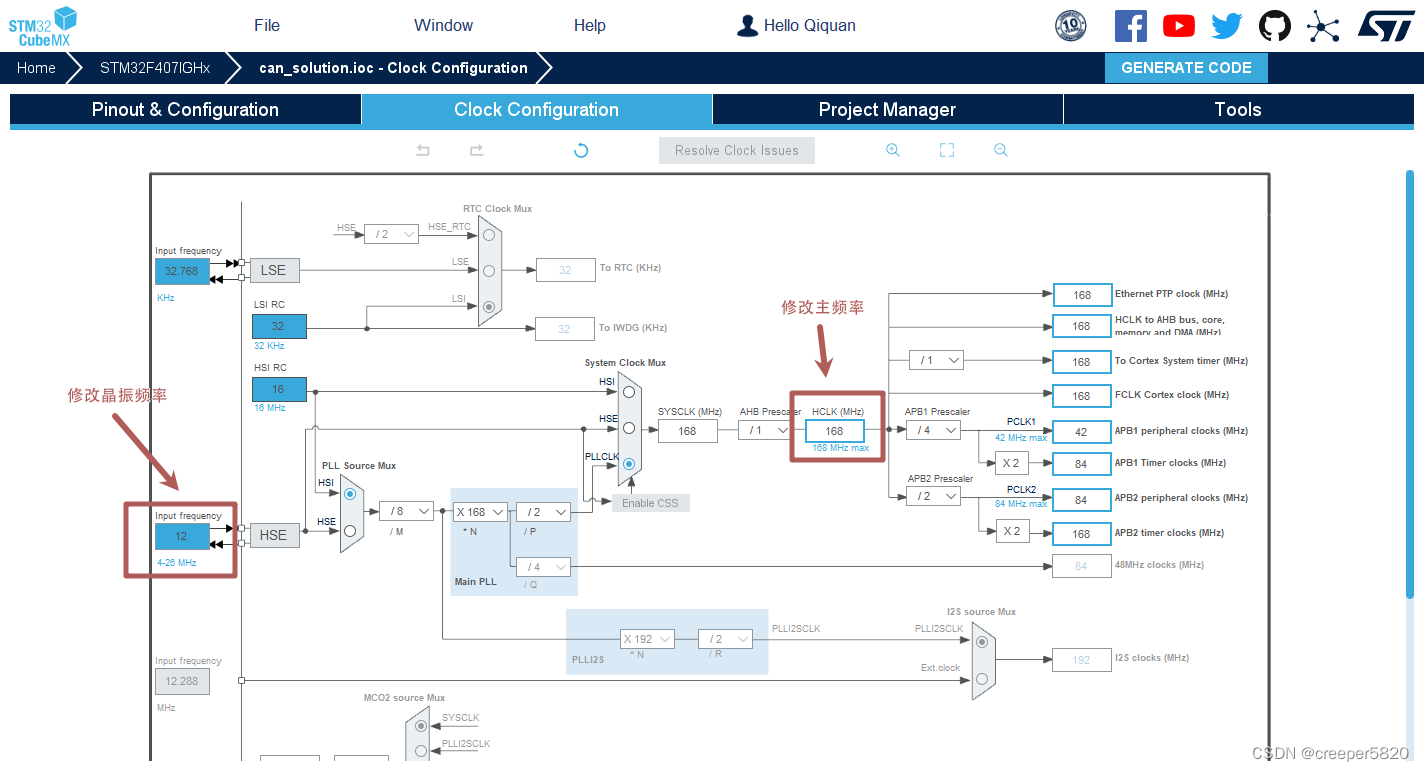
- C板默认的
CAN1 PIN不是原理图上的位置, 需要修改一下 - 注意C板的晶振是12MHz,要把输入频率调整成12MHz
- C板的外设电源和swd输入的电源不在一条线路,不能通过swd口供电,需要插上24v电源或者usb口供电,否则CAN的收发器将不工作,无法正常收发数据,当然,回环模式还是可以收到的,因为回环的数据不经过CAN收发器
- 一对一连接C板和电调时,需要将电调上的电阻打开,一对多时,把最远端的电阻打开即可,保持CAN总线两端串着电阻
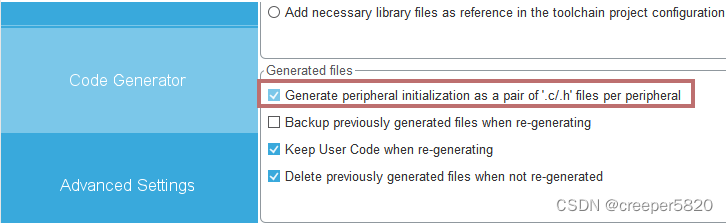
项目管理类型之类的根据自己使用的开发环境来设置即可
简单写一个点灯测试一下
这是板载灯的连线
TIM5_CH1-LED_BLUETIM5_CH2-LED_GREENTIM5_CH3-LED_RED
void breath_led()
{
for (int i = 0; i < 100; i++) {
HAL_Delay(10);
__HAL_TIM_SetCompare(&htim5, TIM_CHANNEL_1, 20000 * i / 100);
__HAL_TIM_SetCompare(&htim5, TIM_CHANNEL_2, 20000 * i / 100);
__HAL_TIM_SetCompare(&htim5, TIM_CHANNEL_3, 20000 * i / 100);
}
for (int i = 100; i > 0; i--) {
HAL_Delay(10);
__HAL_TIM_SetCompare(&htim5, TIM_CHANNEL_1, 20000 * i / 100);
__HAL_TIM_SetCompare(&htim5, TIM_CHANNEL_2, 20000 * i / 100);
__HAL_TIM_SetCompare(&htim5, TIM_CHANNEL_3, 20000 * i / 100);
}
}
将其放入主循环中运行,理所应当地成功了
现在开始配置CAN通信
CubeMX界面中,在CAN1的Parameter Settings我们可以看到
- Bit Timings Parameters - 配置传输速度
- Prescaler (for Time Quantum) - 分频,调整TQ(Time Quantum)大小
- Time Quantum - 最小时间单位
- Time Quanta in Bit Segment 1 - 相位缓冲段1段占几个TQ
- Time Quanta in Bit Segment 2 - 相位缓冲段2段占几个TQ
- Time for one Bit
- Baud Rate - 波特率
- ReSynchronization Jump Width - 再同步补偿宽度
- Basic Parameters - 基本参数
- Time Triggered Communication Mode - 时间触发模式
- Automatic Bus-off Management - 自动离线管理
- Automatic Wake-Up Mode - 自动唤醒
- Automatic Retransmission - 自动重传
- Receive Fifo Locked Mode - 锁定模式
- Transmit Fifo Priority - 报文发送优先级
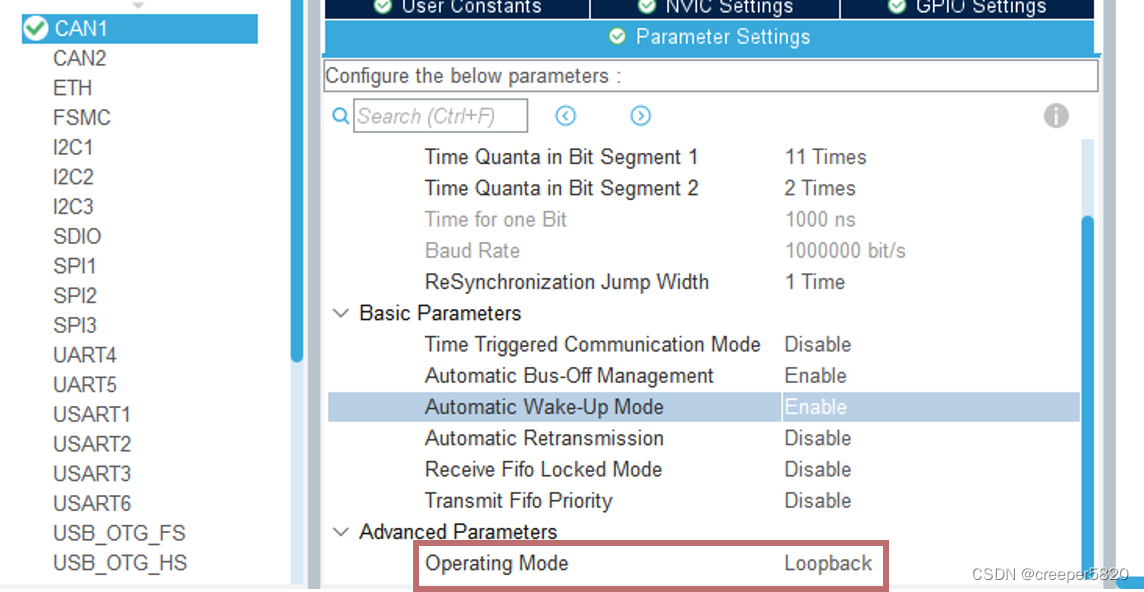
- Advanced Parameters - 高级参数
- Operating Mode -*运行模式:
正常模式静默模式回环模式回环静默模式
- Operating Mode -*运行模式:
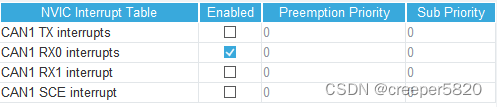
而 NVIC Interrupt Table 中有
- CAN1 TX interrupts
- CAN1 RX0 interrupts
- CAN1 RX1 interrupt
- CAN1 SCE interrupt
这是我们初期需要关注的配置列表
1. 设置波特率
先打开CAN1的Activated选项, 其他的选项才能显示出来
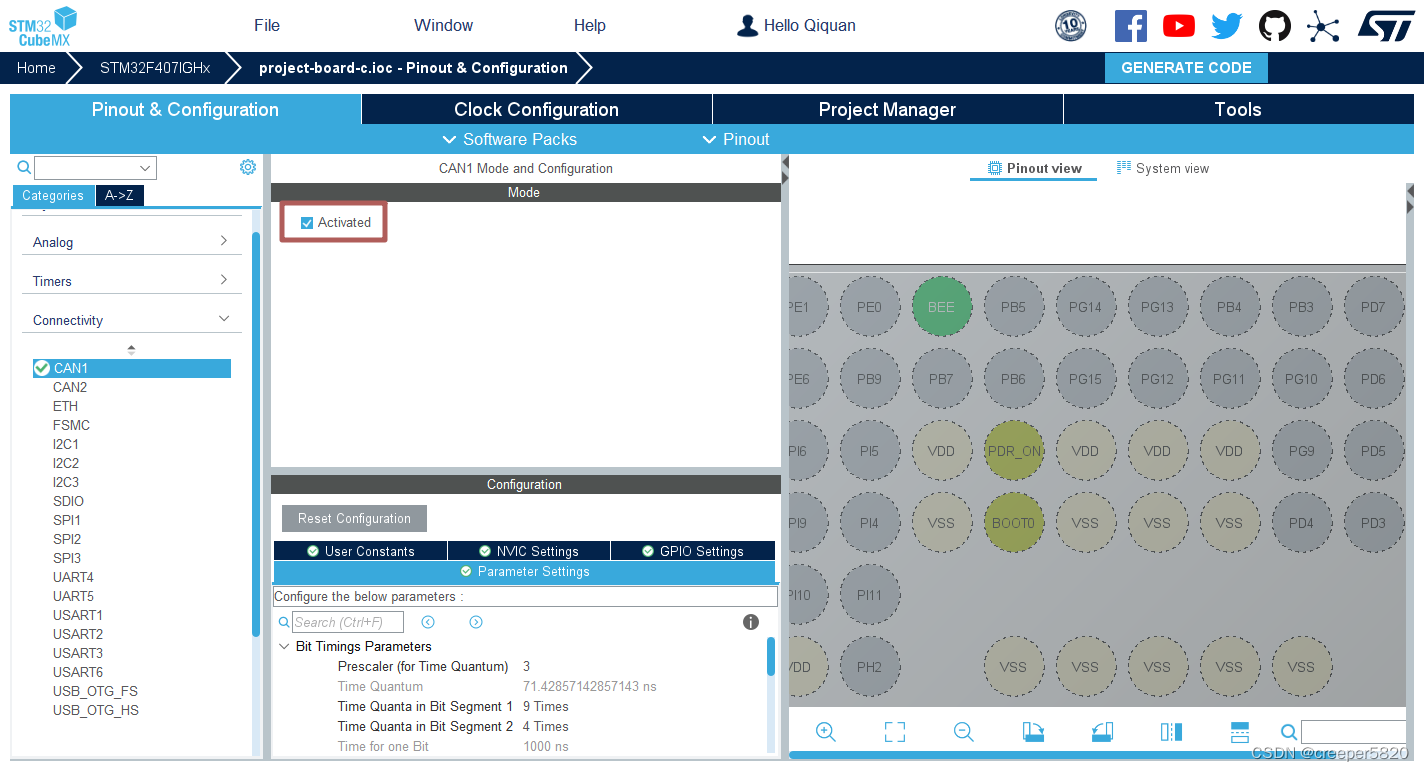
以我的需求为例,查阅大疆官方资料可以得知
将 CAN 信号线连接到控制板接收 CAN 控制指令,CAN 总线比特率为 1Mbps
所以我们需要将CAN通讯的比特率 baud rate 设置为 1000000 bit/s
根据波特率计算公式 BaudRate = TQ * ( Sync + TBS1 + TBS2) , 我们得到如下设置
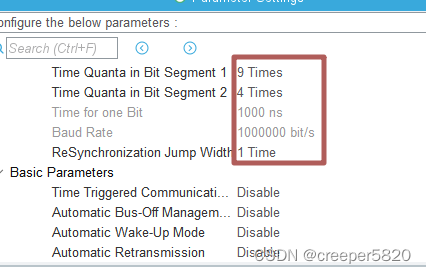
根据实际情况计算一下即可,也可以多选几个选项,把正确的波特率尝试出来,灰色的选项就是CubeMX帮我们计算好的数值
别忘了修改CAN1的引脚

2. 打开中断
处理电调发送的电机信息,需要中断来调用回调函数,于是打开接收中断
在接收和发送信息前,我们会遇到一个CAN通信的抽象概念 —— 邮箱
这里我使用的单片机中,CAN外设具有两个用于接收信息的邮箱,我们命其为 FIFO0和FIFO1,每个邮箱都有一个过滤器,用于筛选报文,可以存放三条报文,在中断设置中对应 CAN1 RX0 interrupt和CAN1 RX1 interrupt,我们打开需要使用的那一个就可以
既然存在接收邮箱,相应的,就有发送邮箱,我们现在只要知道发送邮箱存在发送优先级且每个邮箱只能存放一条报文
现在,我们已经在CubeMX中配置好了CAN,下一步就是要配置CAN过滤器
配置CAN过滤器
前面我们说到,STM32上有两个邮箱用于接收报文,为了接收我们想要的报文,我们需要配置一下过滤器,把不想接受的报文过滤掉,只放行想要的报文
配置过滤器需要我们自己手写,并未提前生成,但HAL库提供了过滤器配置参数的结构体类型,我们只需要给这个结构体赋值,然后调用HAL提供的初始化函数即可完成配置, 下面的代码仅仅是展示, 还不需要写进项目里
// Drivers\STM32F4xx_HAL_Driver\Inc\stm32f4xx_hal_can.h
// 过滤器结构体
typedef struct
{
uint32_t FilterIdHigh;
uint32_t FilterIdLow;
uint32_t FilterMaskIdHigh;
uint32_t FilterMaskIdLow;
uint32_t FilterFIFOAssignment;
uint32_t FilterBank;
uint32_t FilterMode;
uint32_t FilterScale;
uint32_t FilterActivation;
uint32_t SlaveStartFilterBank;
} CAN_FilterTypeDef;
// 配置函数
HAL_StatusTypeDef HAL_CAN_ConfigFilter(
CAN_HandleTypeDef *hcan,
CAN_FilterTypeDef *sFilterConfig
);
具体的使用和结构体的定义随后再讲,我们只需要对这个结构体和函数有一个大概的印象即可
发送接收报文
首先是发送
我预期使用一块主控与四个电机通信,那么在发送报文时,就需要指定发送给哪一个电机,以及其他一些信息,比如发送信息的长度,信息的类型,信息ID类型等等,HAL把这些发送需要的信息定义成了一个结构体 CAN_TxHeaderTypeDef,我们只需要为每一个电机声明一个 CAN_TxHeaderTypeDef 结构体,再确定好发送的数据内容,就可以将数据发送到指定的电机中
我们回想一下,在设置接收中断时,是不是提到了邮箱的概念?STM32F407IGHx为我们提供了三个发送邮箱,在发送时,HAL库会自动选择空闲的邮箱,然后将实际使用的邮箱返回给我们,这也解释了我们传入函数的是指向邮箱的指针,而非一个邮箱编号的常量
HAL库理所应当地帮我们写好了发送的函数,只要传入can的句柄,报文头结构体,数据信息和邮箱即可
下面的代码同样不需要写进项目
// Drivers\STM32F4xx_HAL_Driver\Inc\stm32f4xx_hal_can.h
// 发送函数的声明
HAL_StatusTypeDef HAL_CAN_AddTxMessage(
CAN_HandleTypeDef *hcan,
CAN_TxHeaderTypeDef *pHeader,
uint8_t aData[],
uint32_t *pTxMailbox
);
// 邮箱编号的定义
#define CAN_TX_MAILBOX0 (0x00000001U) /*!< Tx Mailbox 0 */
#define CAN_TX_MAILBOX1 (0x00000002U) /*!< Tx Mailbox 1 */
#define CAN_TX_MAILBOX2 (0x00000004U) /*!< Tx Mailbox 2 */
然后是接收
总线上的报文在经过了我们设置的过滤器后,正确的报文会触发我们设置的中断,我们便可以在中断的回调函数中对收到的数据进行处理了
我们只需要找到HAL库为我们提供的中断函数,对其进行覆写即可
以下是示例代码
// 这是一种使用情况
// 回调函数
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
if(hcan->Instance ==CAN1)
{
HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &RxHeader, date_CAN1);
return ;
}
}
// 这个函数可以从报文中分离出我们想要的信息
HAL_StatusTypeDef HAL_CAN_GetRxMessage(
CAN_HandleTypeDef *hcan, // can句柄
uint32_t RxFifo, // 接收邮箱编号
CAN_RxHeaderTypeDef *pHeader, // 接收报文头
uint8_t aData[] // 数据
);
// 接收邮箱编号的定义
#define CAN_RX_FIFO0 (0x00000000U) /*!< CAN receive FIFO 0 */
#define CAN_RX_FIFO1 (0x00000001U) /*!< CAN receive FIFO 1 */
现在我们配置过滤器和发送接收这两个流程应该是有了一个大概的认知,来做一个简单的测试吧
将运行模式设置为回环发送,我们就可以收到自己发送的报文,前提是能通过邮箱过滤,其他配置依照上文即可
记得重新生成代码
然后我们写一个过滤器的配置, 下面的代码按照定义函数的方式在某个地方写下, 我都写在了main.c中
void can_filter_init()
{
CAN_FilterTypeDef config;
// 报文头结构体的赋值
// 此处配置为接收全部报文,以便于测试
config.FilterActivation = ENABLE; // 启用过滤器
config.FilterBank = 0; // 将要初始化的过滤器组
config.SlaveStartFilterBank = 0; // 从模式下的过滤器组
config.FilterMode = CAN_FILTERMODE_IDMASK; // 掩码模式
config.FilterScale = CAN_FILTERSCALE_32BIT; // 32位宽
config.FilterFIFOAssignment = CAN_FILTER_FIFO0; // 配置邮箱0
config.FilterIdHigh = 0x0000; // 高位0
config.FilterIdLow = 0x0000; // 低位0
config.FilterMaskIdHigh = 0x0000; // 掩码高位不检测
config.FilterMaskIdLow = 0x0000; // 掩码低位不检测
// 将配置加载进CAN 1中
HAL_CAN_ConfigFilter(&hcan1, &config);
}
初始化CAN
上面过滤器的配置中启用了邮箱0 CAN_FILTER_FIFO0,所以在初始化时,我们要打开邮箱0的中断
void can_init()
{
can_filter_init(); // 过滤器
HAL_CAN_Start(&hcan1); // 开启CAN通讯
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING); // 开启接收中断
}
下面这段不用抄, 只是看看中断的类型
// Hal库中的邮箱接收中断类型
CAN_IT_RX_FIFO0_MSG_PENDING /*!< FIFO 0 message pending interrupt */
CAN_IT_RX_FIFO0_FULL /*!< FIFO 0 full interrupt */
CAN_IT_RX_FIFO0_OVERRUN /*!< FIFO 0 overrun interrupt */
CAN_IT_RX_FIFO1_MSG_PENDING /*!< FIFO 1 message pending interrupt */
CAN_IT_RX_FIFO1_FULL /*!< FIFO 1 full interrupt */
CAN_IT_RX_FIFO1_OVERRUN /*!< FIFO 1 overrun interrupt
接着声明一些必要的变量, 这里就是在main函数里面写了
uint8_t can_1_rx[8]; // 接收数据
uint8_t can_1_tx[8]; // 发送数据
CAN_RxHeaderTypeDef can_1_rx_header; // 接收报文头
CAN_TxHeaderTypeDef can_1_tx_header; // 发送报文头
uint32_t mail_tx = CAN_TX_MAILBOX0; // 发送邮箱编号
初始化一些参数, 然后调用一些初始化的函数
// 随便创建一种发送报文头结构体
can_1_tx_header.StdId = 0x00000000;
can_1_tx_header.ExtId = 0x12345000;
can_1_tx_header.IDE = CAN_ID_EXT;
can_1_tx_header.RTR = CAN_RTR_DATA;
can_1_tx_header.DLC = 8;
can_1_tx_header.TransmitGlobalTime = DISABLE;
// 初始化一些发送的数据
can_1_tx[0] = 1;
// 要使用的灯记得开启,根据自己的板子写即可
HAL_TIM_PWM_Start(&htim5, TIM_CHANNEL_1);
// 刚才写的初始化函数用上
can_init();
回调函数的覆写, 写在main.c中就行
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
if (hcan->Instance == CAN1) {
HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &can_1_rx_header, can_1_rx);
// 简单根据接收数据内容做一个反馈,点亮或熄灭板载灯
// 根据自己的板子替换一下点灯的函数
if(can_1_rx[0] == 0)
{
__HAL_TIM_SetCompare(&htim5, TIM_CHANNEL_1, 20000);
}
else if(can_1_rx[0] == 1)
{
__HAL_TIM_SetCompare(&htim5, TIM_CHANNEL_1, 0);
}
return;
}
}
在主循环中不断发送报文, 也就是 while(1)里面
HAL_CAN_AddTxMessage(&hcan1, &can_1_tx_header, can_1_tx, &mail_tx);
这是我写好的 main.c ,注意根据自己使用的板子情况进行修改
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "can.h"
#include "tim.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
uint8_t can_1_rx[8]; // 接收数据
uint8_t can_1_tx[8]; // 发送数据
CAN_RxHeaderTypeDef can_1_rx_header; // 接收保报文头
CAN_TxHeaderTypeDef can_1_tx_header; // 发送报文头
uint32_t mail_tx = CAN_TX_MAILBOX0; // 发送邮箱编号
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
void can_filter_init();
void can_init();
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void can_filter_init()
{
CAN_FilterTypeDef config;
// 报文头结构体的赋值
// 此处配置为接收全部报文,以便于测试
config.FilterActivation = ENABLE; // 启用过滤器
config.FilterBank = 0; // 将要初始化的过滤器组
config.SlaveStartFilterBank = 0; // 从模式下的过滤器组
config.FilterMode = CAN_FILTERMODE_IDMASK; // 掩码模式
config.FilterScale = CAN_FILTERSCALE_32BIT; // 32位宽
config.FilterFIFOAssignment = CAN_FILTER_FIFO0; // 配置邮箱0
config.FilterIdHigh = 0x0000; // 高位0
config.FilterIdLow = 0x0000; // 低位0
config.FilterMaskIdHigh = 0x0000; // 掩码高位不检测
config.FilterMaskIdLow = 0x0000; // 掩码低位不检测
// 将配置加载进CAN 1中
HAL_CAN_ConfigFilter(&hcan1, &config);
}
void can_init()
{
can_filter_init(); // 过滤器
HAL_CAN_Start(&hcan1); // 开启CAN通讯
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING); // 开启接收中断
}
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
if (hcan->Instance == CAN1) {
HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &can_1_rx_header, can_1_rx);
// 简单根据接收数据内容做一个反馈,点亮或熄灭板载灯
// 根据自己的板子替换一下点灯的函数
if (can_1_rx[0] == 0) {
__HAL_TIM_SetCompare(&htim5, TIM_CHANNEL_1, 20000);
} else if (can_1_rx[0] == 1) {
__HAL_TIM_SetCompare(&htim5, TIM_CHANNEL_1, 0);
}
return;
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM4_Init();
MX_TIM5_Init();
MX_CAN1_Init();
/* USER CODE BEGIN 2 */
// 随便创建一种发送报文头结构体
can_1_tx_header.StdId = 0x00000000;
can_1_tx_header.ExtId = 0x12345000;
can_1_tx_header.IDE = CAN_ID_EXT;
can_1_tx_header.RTR = CAN_RTR_DATA;
can_1_tx_header.DLC = 8;
can_1_tx_header.TransmitGlobalTime = DISABLE;
can_1_tx[0] = 1;
HAL_TIM_PWM_Start(&htim5, TIM_CHANNEL_1);
can_init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1) {
HAL_CAN_AddTxMessage(&hcan1, &can_1_tx_header, can_1_tx, &mail_tx);
HAL_Delay(10);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) {
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK) {
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1) {
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
在ozone中查看参数,并实时修改发送数据的数值,发现接收数据也会实时修改,板载灯反馈正常
若不能使用ozone,也可以在代码中修改发送的数值,重新烧录,查看板载灯的情况
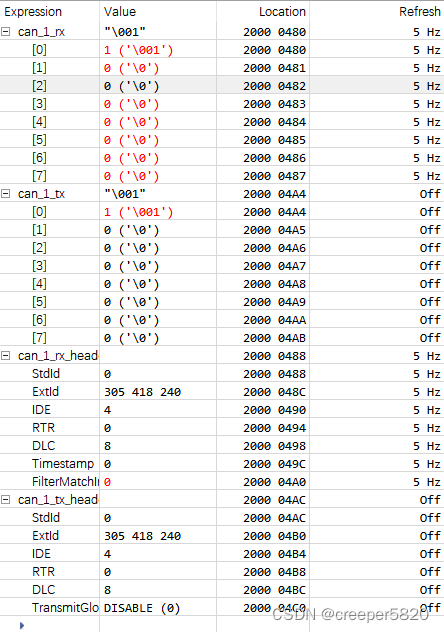
回环测试正常,我们可以进行下一步的了解
CAN与电调通讯
在囫囵吞枣地走通过一遍流程后,我们遇到很很多复杂的模式和结构体,这些需要根据实际情况来酌情配置
接下来我们尝试使用C板来与C610通讯,接收信息并发送信息来控制电机
接收电机的回馈消息
为了保持代码的可读性,我们将CAN相关代码分离开来
大致结构是底层依赖base-can,在其基础上写一层module-m2006,在进程中调用这两个部分文件
为了降低理解的难度,暂时不考虑使用其他设备的可能,只针对一个电调和一个电机的情况先写一份控制代码
首先是base-can部分,它负责与底层的交互,直接使用HAL库提供的函数,将底层与应用层隔离
// base-can.h
#pragma once
#include "can.h"
void init_can(CAN_HandleTypeDef *hcan);
void set_can_tx_header(CAN_TxHeaderTypeDef *header);
// base-can.c
#include "base-can.h"
// 仍然使用最简单的配置,接收所有报文
// 为了统一初始化函数的调用模式,我们将HAL_CAN_ConfigFilter函数的返回值返回
static HAL_StatusTypeDef configure_can_filter(CAN_HandleTypeDef *hcan)
{
CAN_FilterTypeDef config;
config.FilterActivation = CAN_FILTER_ENABLE;
config.FilterFIFOAssignment = CAN_FILTER_FIFO0;
config.FilterMode = CAN_FILTERMODE_IDMASK;
config.FilterScale = CAN_FILTERSCALE_32BIT;
config.FilterIdHigh = 0x00;
config.FilterIdLow = 0x00;
config.FilterMaskIdHigh = 0x00;
config.FilterMaskIdLow = 0x00;
config.FilterBank = 0;
config.SlaveStartFilterBank = 0;
return HAL_CAN_ConfigFilter(hcan, &config);
}
// 集中对CAN进行初始化
void init_can(CAN_HandleTypeDef *hcan)
{
if (configure_can_filter(hcan))
Error_Handler();
if (HAL_CAN_Start(hcan))
Error_Handler();
if (HAL_CAN_ActivateNotification(hcan, CAN_IT_RX_FIFO0_MSG_PENDING))
Error_Handler();
}
// 根据C610手册,设置发送报文头的内容
void set_can_tx_header(CAN_TxHeaderTypeDef *header)
{
header->StdId = 0x200;
header->IDE = CAN_ID_STD;
header->RTR = CAN_RTR_DATA;
header->DLC = 8;
header->TransmitGlobalTime = DISABLE;
}
上面代码写的十分地局限,没有考虑后期可能不断变化的需求,但对于现阶段来说,我们的首要目标是先以最简单的方式,驱动目标电机,现在接着往下写
包装与电调通讯的代码
为了方便我们 get 和 control 电机的状态,可以把对外暴露的api,即电机返回的状态值,用结构体包装,而对于控制电机需要使用到的 句柄 ,或者说一些必要的 上下文信息 ,我们也使用结构体将其包装起来,最后将两个结构体包装为电机完整的结构体,这样可以极大地方便函数的调用
// module-m2006.h
#pragma once
#include "base-can.h"
typedef struct MotorStatus {
int16_t angle;
int16_t speed;
int16_t torque;
} MotorStatus;
typedef struct MotorHandle {
CAN_HandleTypeDef *hcan;
CAN_RxHeaderTypeDef header_rx;
CAN_TxHeaderTypeDef header_tx;
uint32_t mail;
} MotorHandle;
typedef struct Motor {
MotorHandle handle;
MotorStatus status;
} Motor;
void init_motor(Motor *motor);
void get_motor_status(const uint8_t data[8], Motor *motor);
void set_motor_current(const int16_t current, Motor *motor);
// module-m2006.c
#include "module-m2006.h"
// 初始化关于电机的所有信息
void init_motor(Motor *motor)
{
motor->handle.hcan = &hcan1;
init_can(motor->handle.hcan);
set_can_tx_header(&motor->handle.header_tx);
}
// 用于从回报文中提取状态信息
// 按照C610用户手册上给出的高低位数据变换即可
void get_motor_status(const uint8_t data[8], Motor *motor)
{
motor->status.angle = (data[0] << 8) | data[1];
motor->status.speed = (data[2] << 8) | data[3];
motor->status.torque = (data[4] << 8) | data[5];
}
// 用于设置电机输出电流值
// 由于目前只使用一个电机,为了方便,直接设置电机电调的ID为1
// 那么第一位和第二位uint8_t数据就是第一个电机的电流值高低位
// 依照文档,电流值的范围为 -10000 到 10000
void set_motor_current(const int16_t current, Motor *motor)
{
uint8_t data[8];
data[0] = current >> 8;
data[1] = current | 0xff00;
HAL_CAN_AddTxMessage(
motor->handle.hcan, &motor->handle.header_tx,
data, &motor->handle.mail);
}
在做完前面的工作后,我们只需要调用最上层的module-motor提供的初始化函数,就可以对整个系统初始化,然后使用get_motor_status获取电机状态,使用set_motor_current控制电机电流值
主要逻辑和CAN接收回调函数
最后,为了与HAL库生成的文件分离地更彻底一点,我们在CubeMX生成的main.c中,加入我们自定义的进程入口
// 前面代码省略
/* USER CODE BEGIN PFP */
extern void entrypoint();
/* USER CODE END PFP */
// 中间代码省略
/* USER CODE BEGIN 2 */
entrypoint();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1) {
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
// 后面代码省略
使用extern声明一个外部函数,接着在CubeMX提供的主循环前插入该函数,我们便可以创建一个entrypoint.c函数来实现void entrypoint()
同时我们也可以把回调函数写在这里,保证变量作用域的统一,这样以后对代码增删改查都可以避免直接接触CubeMX直接生成的代码,贯彻了代码高内聚低耦合的原则(doge)
// entrypoint.c
#include "main.h"
#include "tim.h"
#include "module-m2006.h"
// entrypoint function from main.h
void entrypoint();
static Motor motor;
static int16_t current;
// @brief the main loop function
// @note control the current of motor every 1 ms
void entrypoint()
{
init_motor(&motor);
current = 0;
while (1) {
HAL_Delay(0);
set_motor_current(current, &motor);
}
}
// @brief callback when receiving message from motor
// @note convert the uint8_t data to motor status
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
if (hcan == &hcan1) {
uint8_t data[8];
HAL_CAN_GetRxMessage(
&hcan1, CAN_RX_FIFO0,
&motor.handle.header_rx, data);
get_motor_status(data, &motor);
return;
}
}
这是代码结构,activity中是主要的进程,里面包含了程序自定义入口,也可以在使用实时系统的情况下将任务写在该文件夹下,dependency是包装后的库函数,供activity调用,base是与底层直接接触的库,一般会用到大量的HAL库,负责实现一些通讯协议,而module是更高级一层的,一般抽象成为某个外设的驱动库
// 注意HAL库生成的代码并没有被写出
// 请将这些文件结构包含进项目目录中,以保证entrypoint函数能够被顺利链接
-activity
entrypoint.c
-dependency
-base
base-can.c
base-can.h
-module
module-m2006.c
module-m2006.h
连接设备与测试
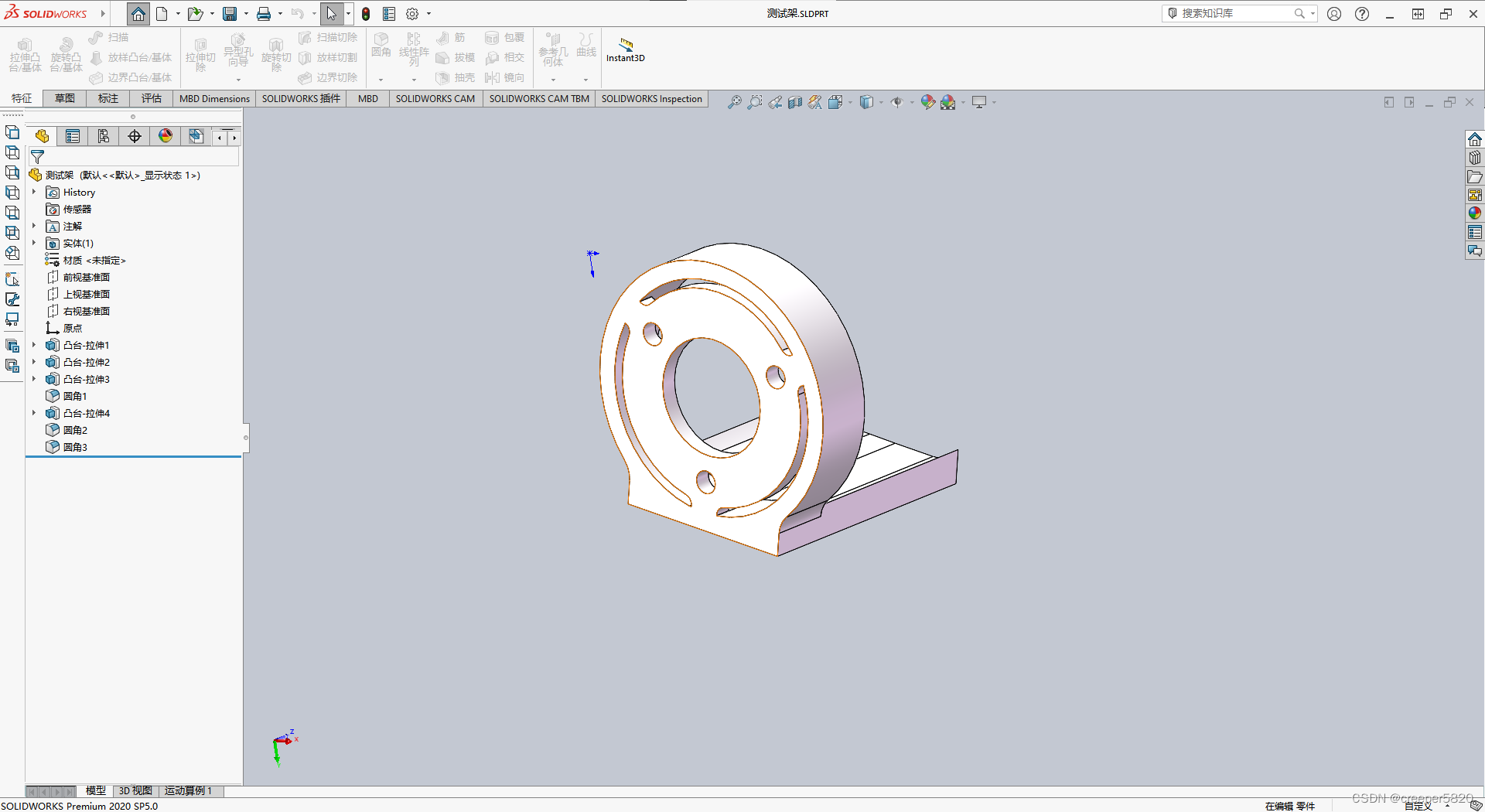
临时画一个M2006的电机架测试用,放上一张整体的连线图
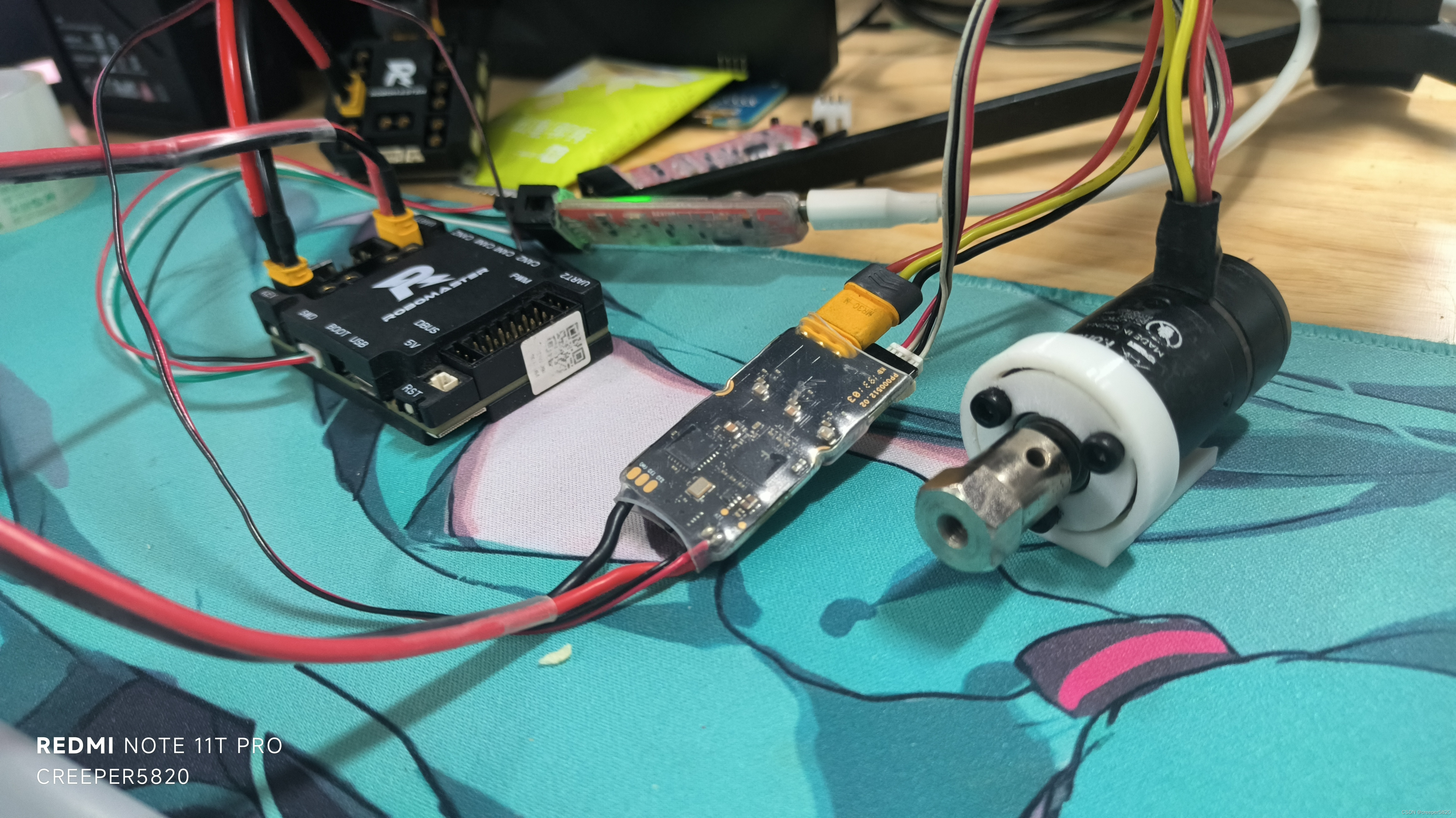
修改entrypoint.c中current的值,主循环中就会以1000Hz的频率调整电机的电流值,同时可以查看电调发回来的三个状态信息,使用Ozone可以查看motor和current两个变量的情况

使用绘图工具将angle的返回值绘制出来,旋转电机,可以发现角度值会随着旋转流畅地改变
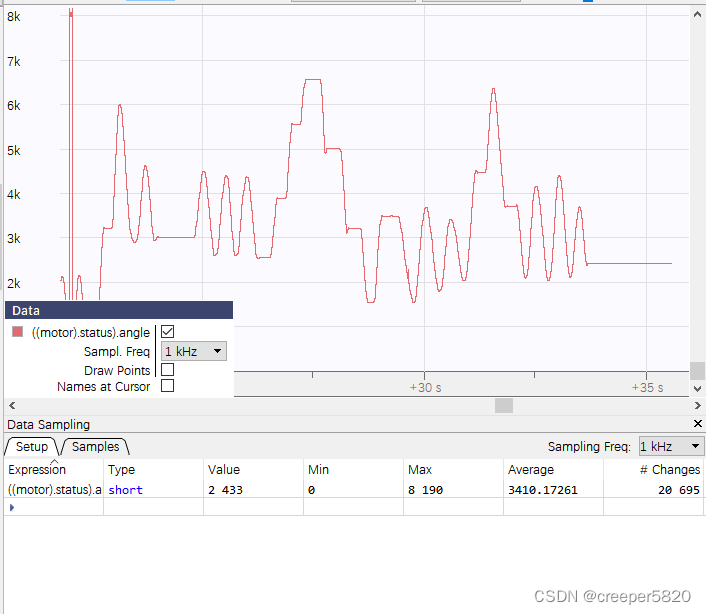
调整current的值,就可以控制电机的正反转动,由于没有写控制算法,运动总是迟滞于电流值的改变的

倘若无法使用ozone,可以使用串口传递将需要查看的变量和需要修改的变量,或者修改current后查看电机转动状态亦可,各个参数的范围请参照官方提供的开发文档
CAN的各种配置与模式
HAL库关于CAN的说明
想要深入了解Hal库提供的接口,最好的办法是直接查看源码上的注释
这是 stm32f4xx_hal_can.c 中的注释,我翻译了一下
如何使用该驱动
- 通过执行
HAL_CAN_MspInit()初始化CAN的底层资源- 使用
__HAL_RCC_CANx_CLK_ENABLE()启用CAN接口时钟 - 配置
CAN引脚- 启用
CAN GPIOs时钟 - 将
CAN引脚配置为可选的开漏型
- 启用
- 如果使用中断(例如
HAL_CAN_ActivateNotification())- 使用
HAL_NVIC_SetPriority()配置CAN中断优先级 - 使用
HAL_NVIC_EnableIRQ()启用CAN IRQ handler - 在
CAN IRQ handler中,调用HAL_CAN_IRQHandler()
- 使用
- 使用
- 使用
HAL_CAN_Init()函数初始化CAN外设 该函数委托HAL_CAN_MspInit()进行初步的初始化 - 使用以下函数配置接收过滤器
HAL_CAN_ConfigFilter()
- 使用
HAL_CAN_Start()函数启动 CAN 模块 此后该节点在总线上便处于活动状态:接收报文,并能发送报文 - 为管理报文传输,可使用以下 Tx 控制函数
HAL_CAN_AddTxMessage()用于请求传输新的报文信息HAL_CAN_AbortTxRequest()用于中止待处理报文的传输HAL_CAN_GetTxMailboxesFreeLevel()用来获取空闲的 Tx 邮箱的数量HAL_CAN_IsTxMessagePending()用于检查 Tx 邮箱中是否有待处理的信息HAL_CAN_GetTxTimestamp()当Time triggered communication mode开启时,用来获取发送的 Tx 消息的时间戳
- 当
CAN Rx FIFO收到报文时,可以使用HAL_CAN_GetRxMessage()获取,HAL_CAN_GetRxFifoFillLevel()可以获取Rx FIFO中存储的报文数量 - 调用
HAL_CAN_Stop()函数可停止 CAN 模块 - 通过
HAL_CAN_DeInit()函数实现去初始化
轮询模式操作
- 接收
- 使用
HAL_CAN_GetRxFifoFillLevel()监控信息接收情况,至少收到一条信息后停止监控 - 然后使用
HAL_CAN_GetRxMessage()获取信息
- 使用
- 传输
- 使用
HAL_CAN_GetTxMailboxesFreeLevel()监控发送信箱的是否空闲,至少有一个发送信箱空闲后停止 - 然后使用
HAL_CAN_AddTxMessage()请求发送
- 使用
中断模式操作
-
使用
HAL_CAN_ActivateNotification()激活通知,然后可以使用HAL_CAN_xxxCallback()来控制接收消息通知,该回调也是使用HAL_CAN_GetRxMessage()和HAL_CAN_AddTxMessage()来实现的 -
可以使用
HAL_CAN_DeactivateNotification()函数停用通知 -
应特别注意
CAN_IT_RX_FIFO0_MSG_PENDING和CAN_IT_RX_FIFO1_MSG_PENDING,这些通知会触发回调HAL_CAN_RxFIFO0MsgPendingCallback()和HAL_CAN_RxFIFO1MsgPendingCallback()用户有两种可选项- 使用
HAL_CAN_GetRxMessage()在回调中直接获取 Rx 消息 - 或者在回调中停用通知,而不获取 Rx 消息,使用
HAL_CAN_GetRxMessage()获取 Rx 消息后再次激活通知
- 使用
上面这一部分注释详细介绍了Hal库CAN通信的使用流程,而在接收过滤器初始化之前的步骤,均由CubeMX工具替我们完成,我们只需调用Hal提供的api来完成剩下的步骤
同时,针对各个CAN通讯的时期,Hal库都提供了完备的回调函数,只要使用 HAL_CAN_RegisterCallback() 来注册对应的中断,然后覆写下面的回调函数即可,这些回调函数都会以 __weak 的类型声明,前面会加上 HAL_CAN_,他们都可以在stm32f4xx_hal_can.c中找到
The compilation define USE_HAL_CAN_REGISTER_CALLBACKS when set to 1
allows the user to configure dynamically the driver callbacks.
Use Function HAL_CAN_RegisterCallback() to register an interrupt callback.
Function HAL_CAN_RegisterCallback() allows to register following callbacks:
(+) TxMailbox0CompleteCallback : Tx Mailbox 0 Complete Callback.
(+) TxMailbox1CompleteCallback : Tx Mailbox 1 Complete Callback.
(+) TxMailbox2CompleteCallback : Tx Mailbox 2 Complete Callback.
(+) TxMailbox0AbortCallback : Tx Mailbox 0 Abort Callback.
(+) TxMailbox1AbortCallback : Tx Mailbox 1 Abort Callback.
(+) TxMailbox2AbortCallback : Tx Mailbox 2 Abort Callback.
(+) RxFifo0MsgPendingCallback : Rx Fifo 0 Message Pending Callback.
(+) RxFifo0FullCallback : Rx Fifo 0 Full Callback.
(+) RxFifo1MsgPendingCallback : Rx Fifo 1 Message Pending Callback.
(+) RxFifo1FullCallback : Rx Fifo 1 Full Callback.
(+) SleepCallback : Sleep Callback.
(+) WakeUpFromRxMsgCallback : Wake Up From Rx Message Callback.
(+) ErrorCallback : Error Callback.
(+) MspInitCallback : CAN MspInit.
(+) MspDeInitCallback : CAN MspDeInit.
This function takes as parameters the HAL peripheral handle, the Callback ID
and a pointer to the user callback function.
需要注意的是,HAL_CAN_ActivateNotification() 本质是开启硬件中断,而 HAL_CAN_RegisterCallback() 本质是软件层面的回调,这在源代码中可以很清楚地看出
// in HAL_CAN_ActivateNotification(CAN_HandleTypeDef *hcan, uint32_t ActiveITs)
__HAL_CAN_ENABLE_IT(hcan, ActiveITs);
// in HAL_CAN_RegisterCallback(
// CAN_HandleTypeDef *hcan,
// HAL_CAN_CallbackIDTypeDef CallbackID,
// void (* pCallback)(CAN_HandleTypeDef *_hcan)
// )
case HAL_CAN_TX_MAILBOX0_COMPLETE_CB_ID :
hcan->TxMailbox0CompleteCallback = pCallback;
break;
上面我忽略了对于休眠模式的内容,感兴趣的可以去浏览器搜索相关api的使用
CubeMX 配置与过滤器
囿于篇幅,这两个方面就不写在这篇文章,只是简单总结一下
配置要点是波特率的设置,正常的收发模式可以满足大部分的场景,上面配置波特率我只是一笔带过,这里在重新讲一下
波特率的计算参数主要有三个
PrescalarTime Quanta in Bit Segment 1Time Quanta in Bit Segment 2
记住几个常用的组合足以应对大部分需求,注意CubeMX会判断各个传播相位是否过小,倘若遇到无法设置的问题时,可以试试将另一个参数先调大,将之前的参数调到目标值后再调回另一个参数
而关于过滤器,要想参透原理又是需要不短的篇幅,倘若CAN设备数量不多,先用着全开放的过滤器吧,在回调函数判断回报文头结构体的ID就可以实现分别处理,C610设置ID的方法在文档中有很详细的介绍
文末
这篇文章写了好几天,电路和马原成绩还没有出来,工程数学挂了,大学物理及格,一众水课平安度过,希望能过个好年吧
2023年1月24日凌晨2点半结文