Qt Modbus TCP通讯读写
Modbus TCP 协议
Modbus协议是一个master/slave架构的协议。有一个节点是master节点,其他使用Modbus协议参与通信的节点是slave节点。每一个slave设备都有一个唯一的地址。在串行和MB+网络中,只有被指定为主节点的节点可以启动一个命令(在以太网上,任何一个设备都能发送一个Modbus命令,但是通常也只有一个主节点设备启动指令)。
Modbus TCP/IP协议格式
- 主机poll端发送读写报文样例如下,该报文对应的功能码选择的10
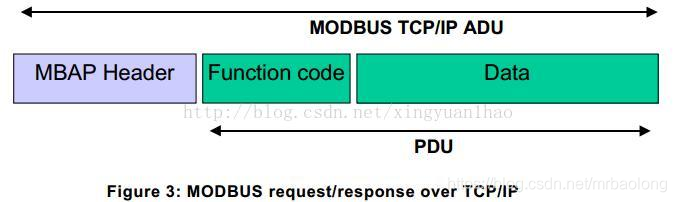
- 如上图所示,报文主要分为两部分。协议头(MBAP Header)和PDU。PDU 又包含功能码(Function code)和数据(Data)两部分。
0232 0000 0009 01 10 9C490001020000
协议头: 0232 0000 0009 01
PDU: 10 9C490001020000
| 数据 | 含义 |
|---|---|
| 0232 | 主机发出的检验信息,从机slave将这个两个字节放在响应报文中 |
| 0000 | 表示协议标识符,00 00为modbus的TCP/IP协议 |
| 0009 | 数据长度,用来指示接下来数据的长度,单位字 |
| 01 | 设备地址,用以标识连接在串行线或者网络上的远程服务端的地址 |
| 10 | 功能码,此时代码10为WriteMultipleRegisters写多个寄存器数据 |
| 9C49 | 写入的起始地址40009 |
| 0001 | 写入寄存器长度,16进制 |
| 02 0000 | 写入的数据,02 表示数据长度为两个字节; 0000表示两个字节的数据 |
Qt Modbus 模块 读写
- 引入模块
QT += serialbus serialport
- 引入头文件
#include <QModbusTcpClient>
#include <QModbusReply>
- 建立连接
QModbusClient *modbusDevice=new QModbusTcpClient();
modbusDevice->setConnectionParameter(QModbusDevice::NetworkPortParameter,1502);
modbusDevice->setConnectionParameter(QModbusDevice::NetworkAddressParameter, "127.0.0.1");
modbusDevice->setTimeout(2000);
modbusDevice->setNumberOfRetries(3);
modbusDevice->connectDevice();
- 读取
//发送请求
QModbusDataUnit readUnit(QModbusDataUnit::HoldingRegisters,30001,1);
if (auto *reply = modbusDevice->sendReadRequest(readUnit, 1))
{
if (!reply->isFinished())
{
connect(reply, &QModbusReply::finished,this,&ThisClass::readReady);
}
else
{
delete reply;
}
}
//处理请求
void ThisClass::readReady()
{
QModbusReply *reply = qobject_cast<QModbusReply *>(sender());
if (!reply)
return;
if (reply->error() == QModbusDevice::NoError)
{
const QModbusDataUnit unit = reply->result();
// if(unit.startAddress()==30001){
qint16 res=unit.value(0);
// }
}
else
{
}
reply->deleteLater(); // delete the reply
}
- 向40009寄存器地址写入1 (0232 0000 0009 01 10 9C49 0001 02 0001)
//写请求
// 9C490001020001 :数据部分
QByteArray data=QByteArray::fromHex("9c490001020001");
// QModbusRequest::WriteMultipleRegisters:功能码 10
QModbusRequest request(QModbusRequest::WriteMultipleRegisters,
data);
// 1 :设备地址
if (auto *reply = modbusDevice->sendRawRequest(request,1))
{
if (!reply->isFinished())
{
connect(reply, &QModbusReply::finished,this,&ThisClass::writeReady);
}
else
{
delete reply;
}
}
//响应处理
void ThisClass::writeReady()
{
QModbusReply *reply = qobject_cast<QModbusReply *>(sender());
if (!reply)
return;
reply->deleteLater(); // delete the reply
}