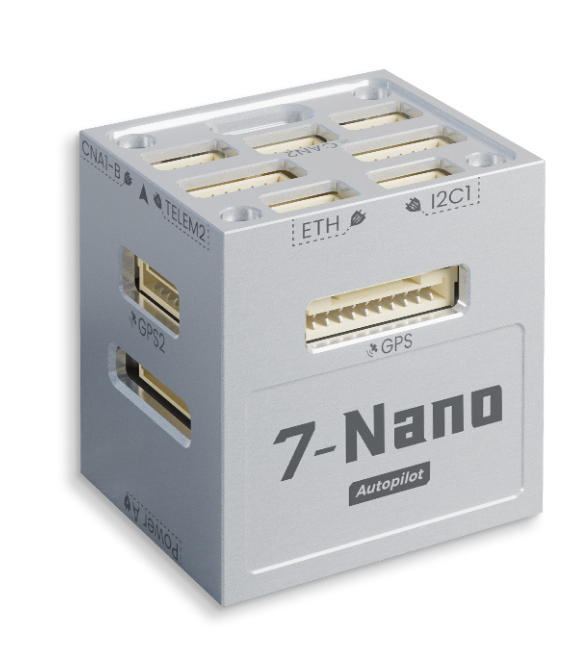
7-Nano简介
7-Nano是一款针对小型化无人系统设备研发的微型自动驾驶仪。它由雷迅创新自主研发和生产,其创新性的采用叠层设计,在极小的空间中集成高性能STM32H7处理器、双冗余工业级IMU和丰富完善的扩展接口;其支持以太网通信接口,可实现智能控制器与无人系统设备各组件低延时、大带宽的实时通信需求。
- 双浮点运算H7处理器,高达480Mhz运行频率。
- 全新双工业级IMU冗余设计。
- 创新型叠层设计,超小尺寸,全功能及丰富接口,丰富的扩展。
- 集成以太网接口,支持与机载计算机等通过网口通信。
- 支持5V/3.3V PWM配置输出。
- 兼容PX4/ArduPilot的各种机型。
硬件参数
主处理器:STM32H753 Arm® Cortex®-M7 480 MHz 2Mb Flash
传感器
加速计:IIM-42652/BMI088
陀螺仪:IIM-42652/BMI088
电子罗盘:IST8310
气压计:ICP-20100/BMP581
接口
I2C:3个
PWM输出:14(可配置3.3V/5V)
RC IN:1个,支持PPM/SBUS/DSM等
RSSI输入:PWM或3.3模拟电压
CAN标准总线:2
Power输入:1(端子型号Molex 50394-8052)
GPS&安全开关:1
GPS2: 1
ADC: ADC3.3和ADC6.6
Debug :1
USB接口 :TYPE C
ETH以太网: 1
工作环境及物理参数
PM工作电压 4.5 ~ 5.5 V
USB电压 4.75 ~ 5.25 V
伺服输入 0 ~ 10v
工作温度 -20 ~ 85°c
工作湿度 5%~95%(不凝结)
重量 33.8g
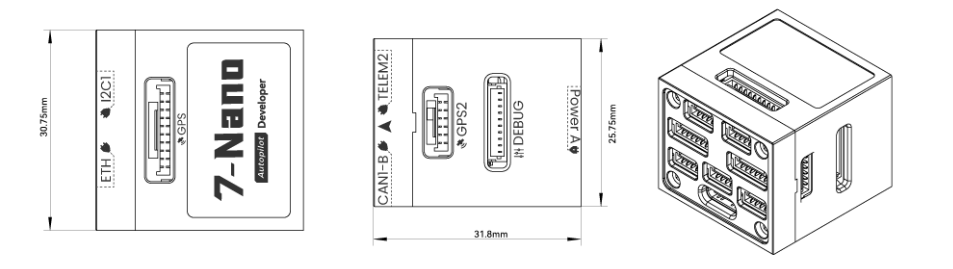
尺寸
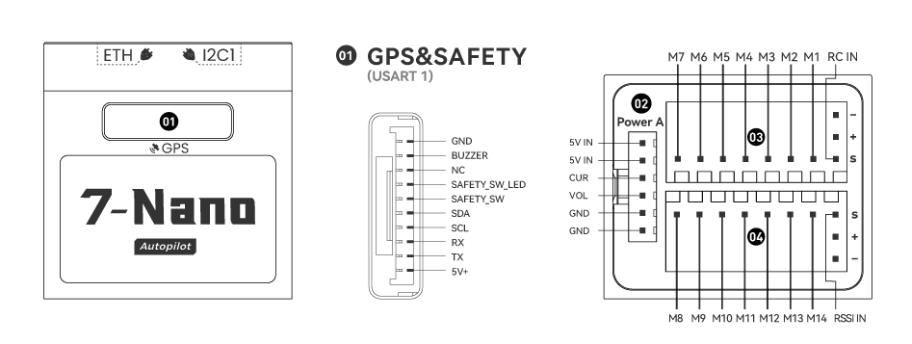
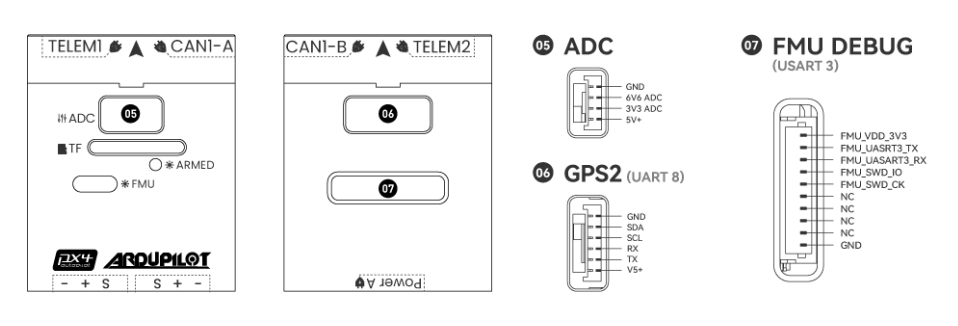
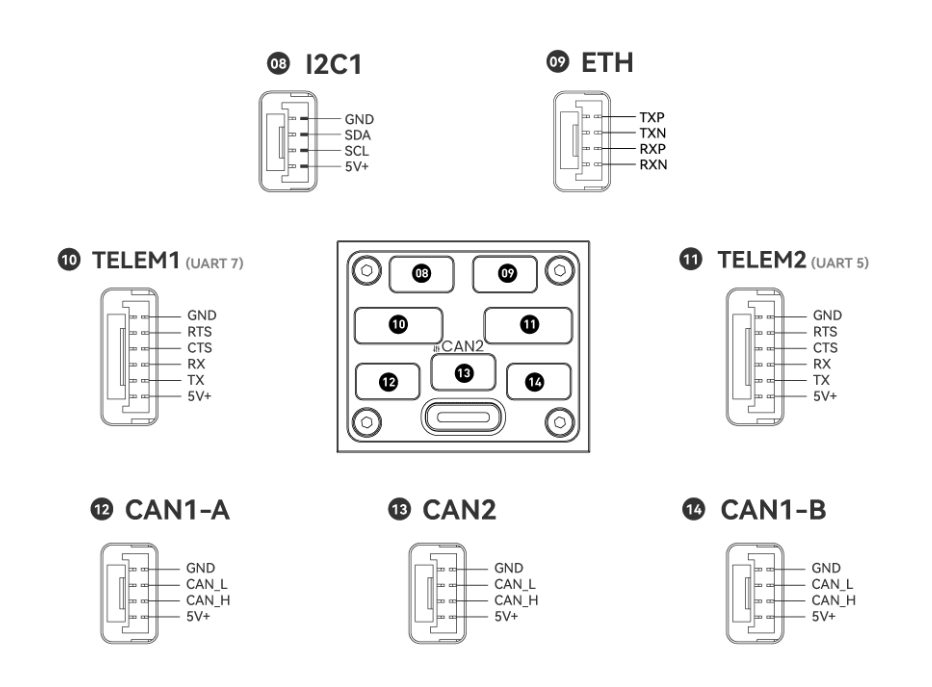
接口定义
7 Nano自动驾驶仪采用相同的Pixhawk引脚标准。
模块连接
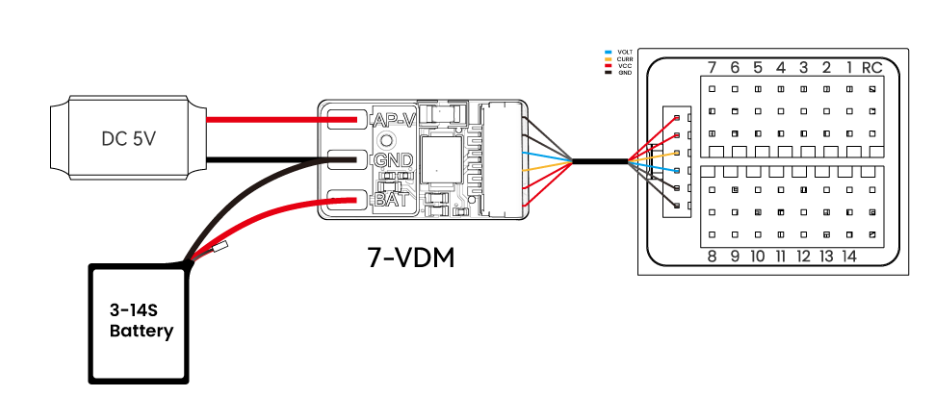
供电部分
有两种方式:
- 通过7-VDM
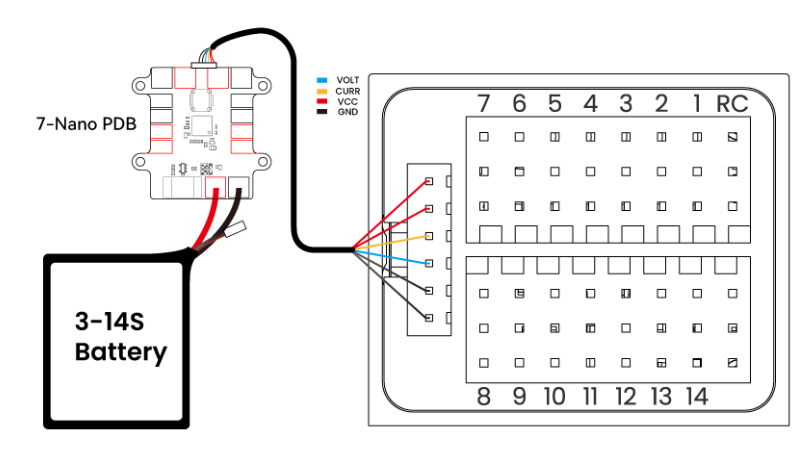
- 通过PDB
7-VDM电源检测模块还需自行配备一个BEC模块(5V)为控制器供电。
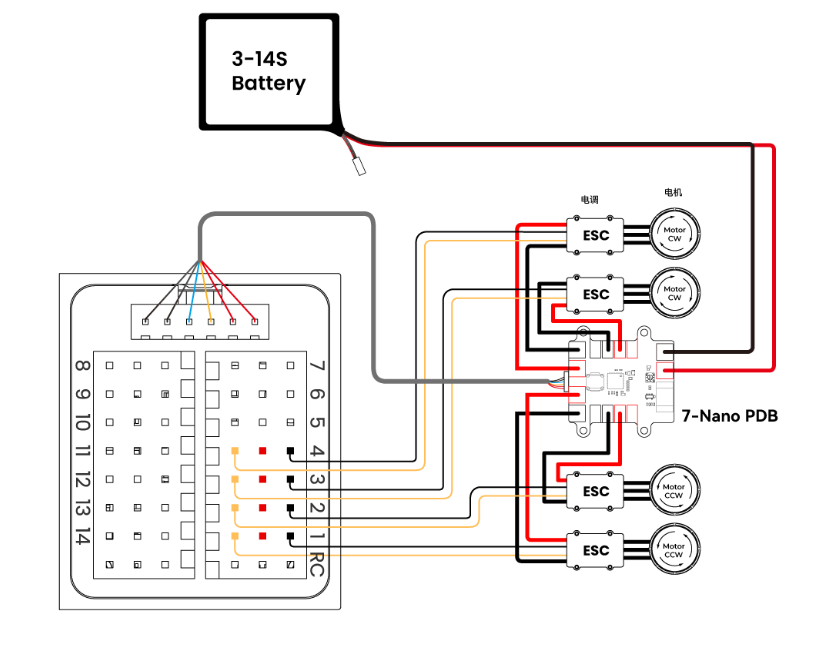
7-Nano PDB电源监测模块,内含BEC、电源检测、分电板功能。
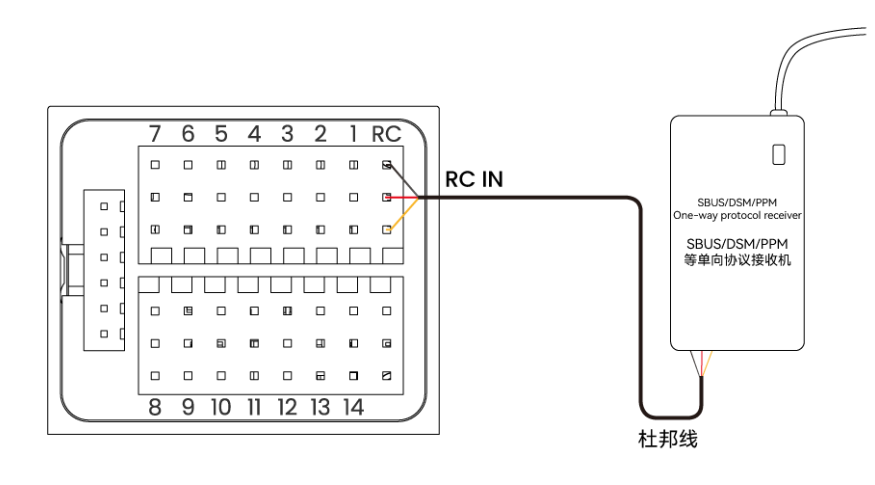
遥控器
SBUS/DSM/PPM等单向协议接收机
使用杜邦线将接收机连接至侧边的RC接口。
电机
电机/伺服系统按照机身参考载机指定的顺序连接到M1~M14接口。
固件安装
以PX4为例
USB数据线,一端接电脑,一端接飞控的type-c口
7-Nano系列飞控兼容PX4 v1.15.2及以上版本固件(该固件在2024年11月20日为最新的固件了)
该固件可以从网上下载
然后通过 QGC 软件进行固件刷写 即可完成 固件安装