前面我们介绍了一些计算图层的概念,本节将会就节点这个概念深入讨论,并且介绍 roscore , rosnode 和 rosrun 等命令行工具的使用方法。
节点实际上是 ROS 包中的可执行文件。如前所述节点可以发布或订阅话题,也可以提供或使用服务。
3.4.1 rosnode
rosnode 是用来显示当前正在运行的 ROS 节点的信息。rosnode list 命令可以列出这些活动节点,首先我们还是先启动主节点 ROS Master ,输入如下指令:
roscore
然后输入如下指令,观察当前正在活动的节点信息:
rosnode list
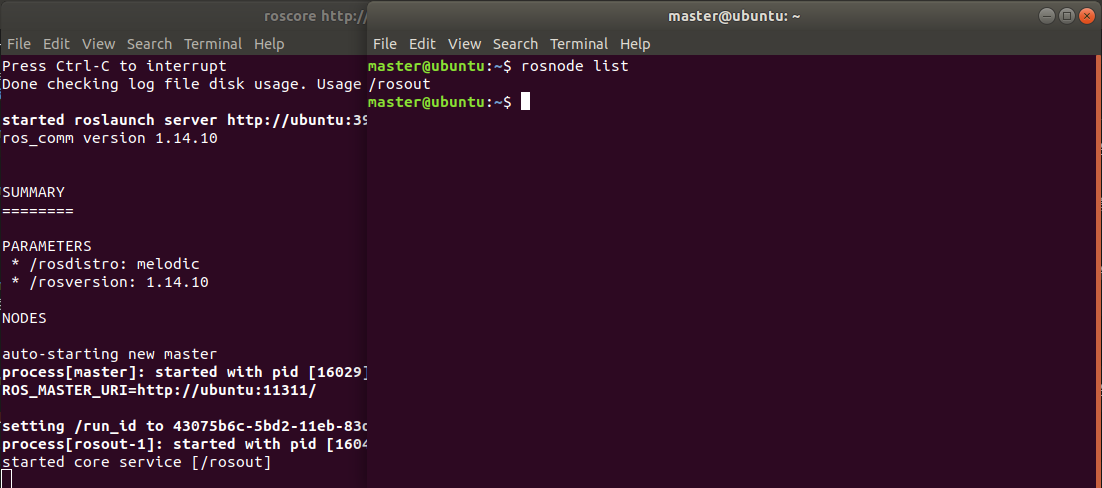
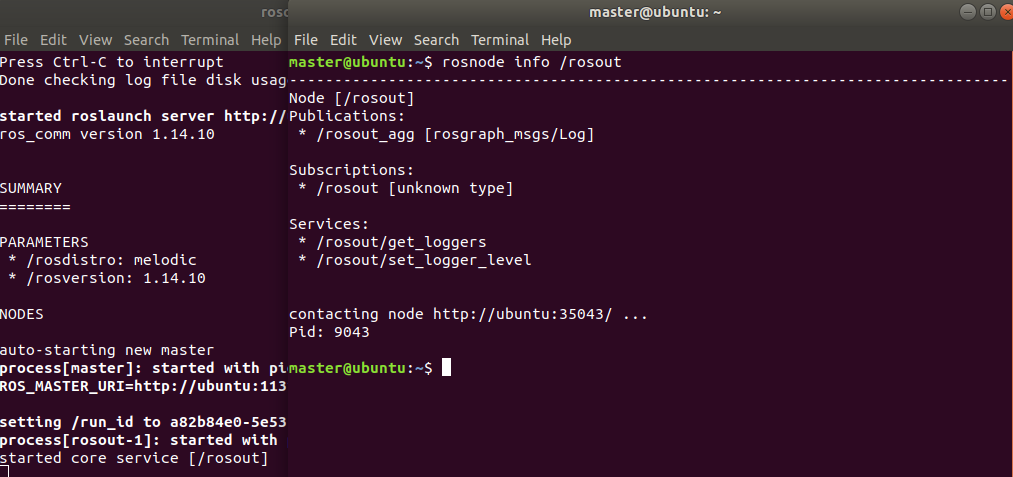
可以看到,当前只有一个名为 rosout 的节点在运行,这个节点收集并记录所有节点的调试输出,并且始终处于运行状态。如果想查看这个节点更详细的信息,可以输入如下指令:
rosnode info /rosout
3.4.2 rosrun
rosrun 命令允许我们使用软件包的名称直接启动一个该软件包内的节点,而不必知道软件包以