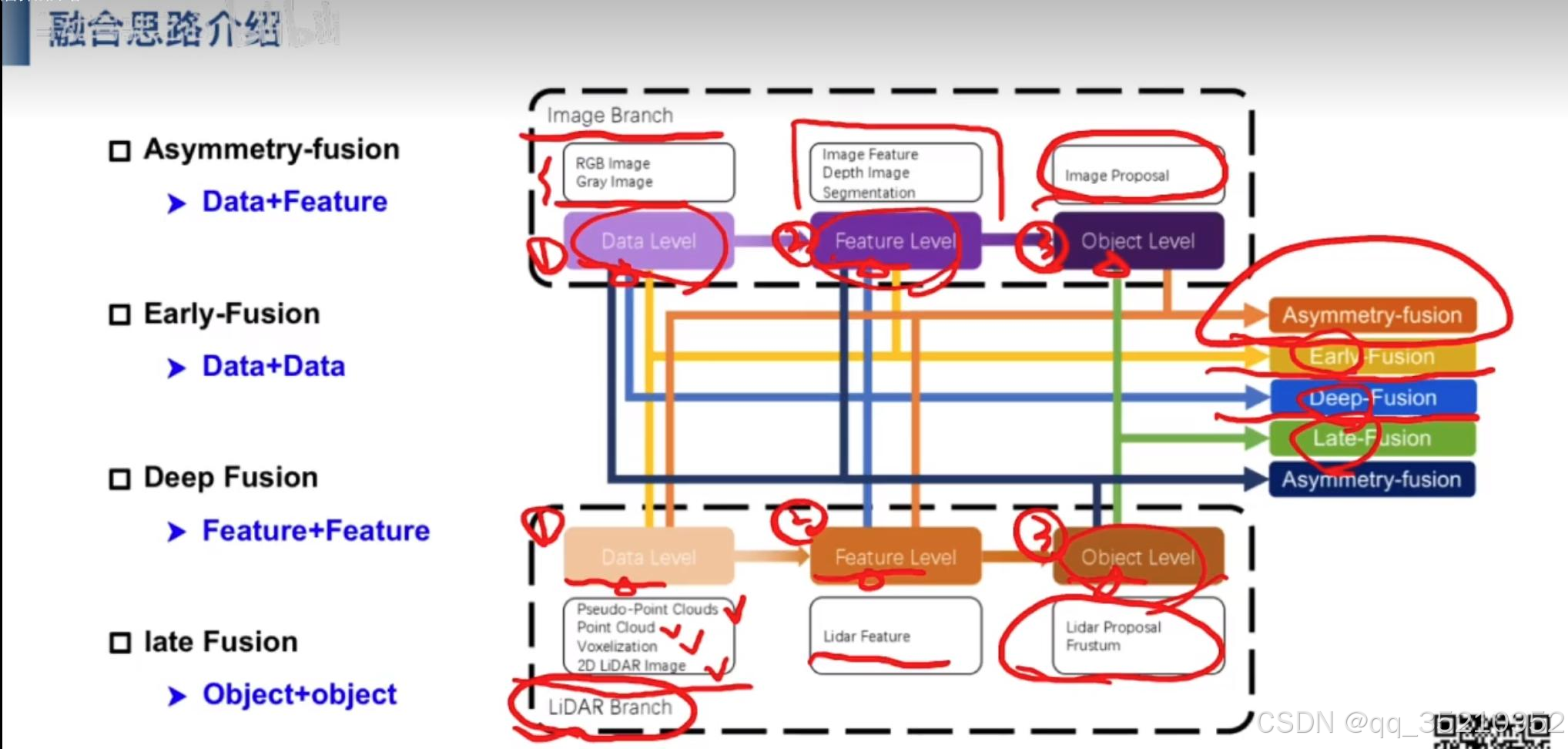
2、deep fusion 深度融合,也是特征级别融合,也叫多模态融合,如bevfusion范式
3、late fusion 晚融合,也是后融合,目标级融合,也是基于规则的融合方法
4、asymmetry fusion 不对称融合,用已经检测好的2d框投影原始3d点云,或者用像素给3d点云检测框上色,增加语义信息描述。
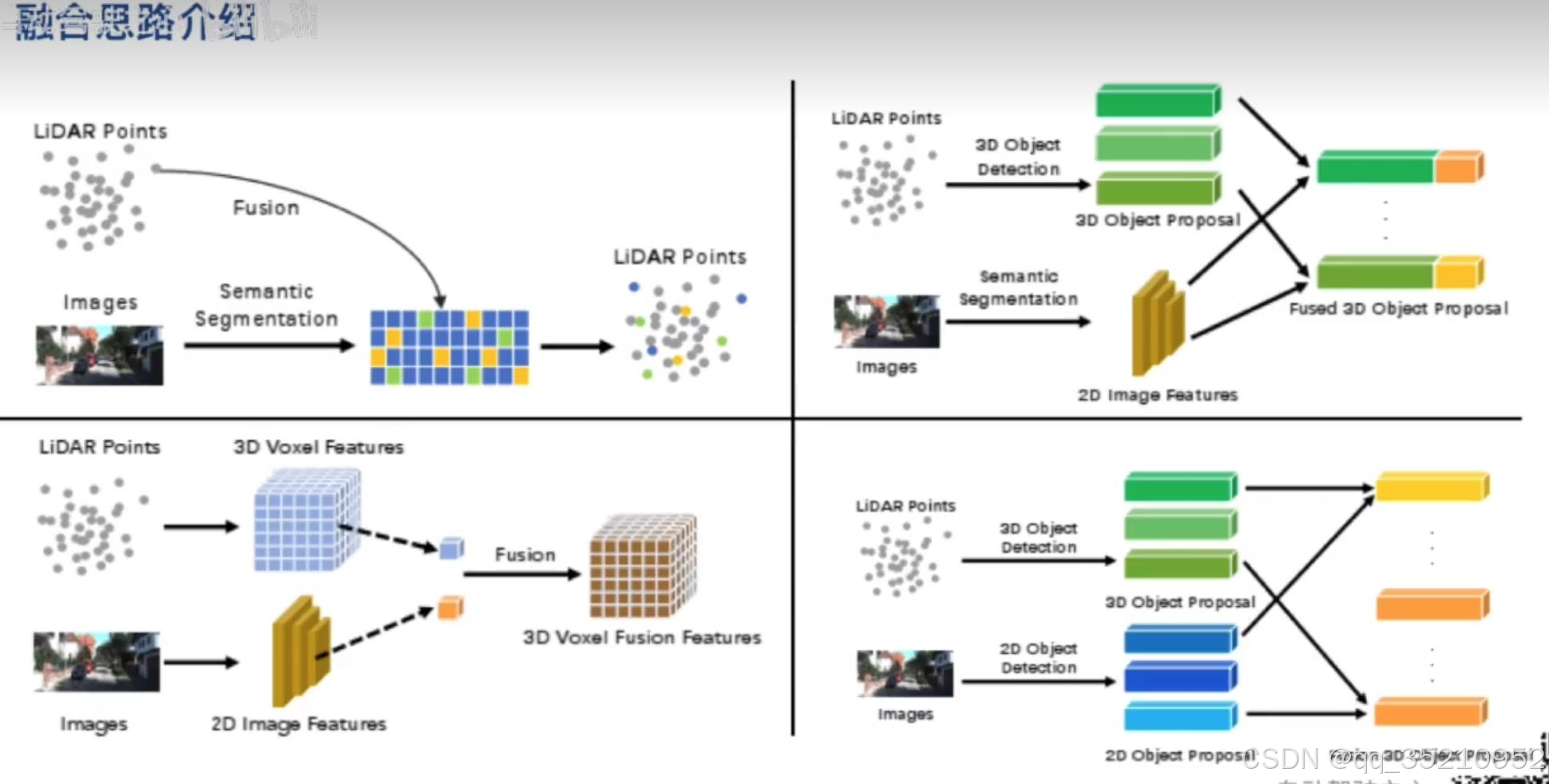
1、左上:early fusion
2、右上 :asymmetry fusion
3、左下:deep fusion
4、右下:late fusion
2、deep fusion 深度融合,也是特征级别融合,也叫多模态融合,如bevfusion范式
3、late fusion 晚融合,也是后融合,目标级融合,也是基于规则的融合方法
4、asymmetry fusion 不对称融合,用已经检测好的2d框投影原始3d点云,或者用像素给3d点云检测框上色,增加语义信息描述。
1、左上:early fusion
2、右上 :asymmetry fusion
3、左下:deep fusion
4、右下:late fusion
道可道,非常道;名可名,非常名。 无名,天地之始,有名,万物之母。 故常无欲,以观其妙,常有欲,以观其徼。 此两者,同出而异名,同谓之玄,玄之又玄,众妙之门。
