文章目录
0 前言
本文是研究飞控过程中的学习笔记,系统分析了四旋翼飞行器的坐标变换、运动学与动力学模型,以此作为飞控开发的基础。
1 无人机的坐标变换
1.1 坐标系1
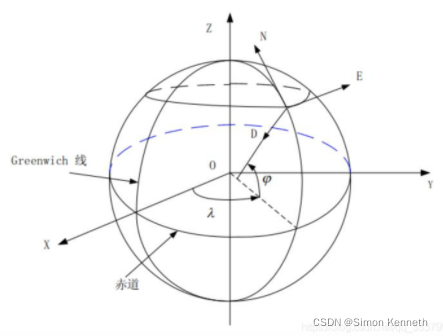
1.1.1 地心坐标系
地球中心坐标系,即坐标系原点位于地心。X轴通过格林尼治线和赤道线的交点,正方向为原点指向交点方向。 Z轴通过原点指向北极。 Y轴与X,Z轴构成右手坐标系。
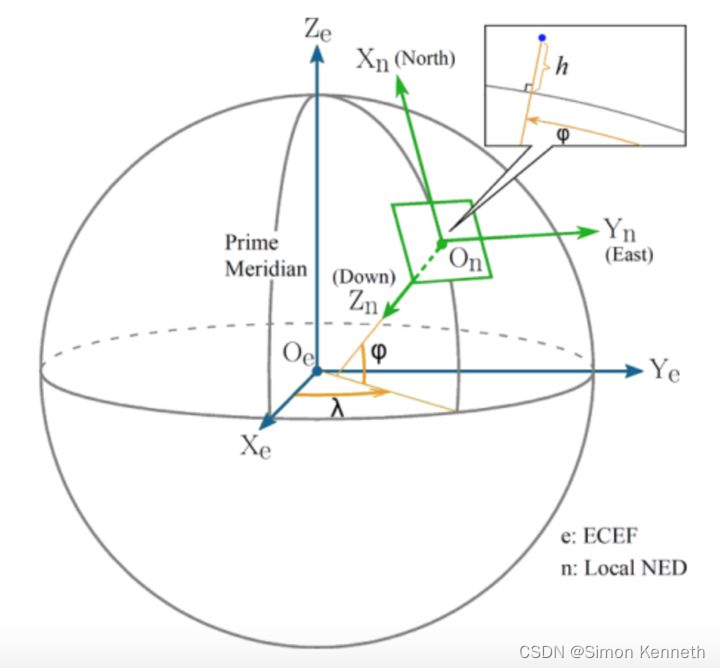
1.1.2 NED(北东地)坐标系
由于地心坐标系建立产生的GPS信号是以前面的形式存在,而现实无人机控制中需要在平面,因此引入了NED坐标系,如图绿色部分即为NED坐标系。NED坐标系是在导航计算时使用的坐标系。向量分别指向北,东,地,因此NED坐标系也经常称为北东地坐标系。
通常我们以NED为确定无人机位姿的参考坐标系,因此当无人机向上飞时,NED坐标系下的z坐标实际上是减小的。
1.1.3 机体坐标系
机体坐标系与机体固联,随飞机一起相对地球运动。x轴沿机头正方向,y轴沿机身右侧,z轴由右手定则得到。
1.2 旋转矩阵
与机器人学的内容相似,这里只放结果:
R
x
(
θ
)
=
[
1
0
0
0
cos
θ
sin
θ
0
−
sin
θ
cos
θ
]
R
y
(
θ
)
=
[
cos
θ
0
−
sin
θ
0
1
0
sin
θ
0
cos
θ
]
R
z
(
θ
)
=
[
cos
θ
sin
θ
0
−
sin
θ
cos
θ
0
0
0
1
]
(1-1)
R_x(\theta)= \begin{bmatrix} 1 & 0 & 0\\ 0 & \cos\theta & \sin \theta\\ 0 & -\sin \theta & \cos\theta \end{bmatrix} \\ R_y(\theta)= \begin{bmatrix} \cos\theta & 0 & -\sin\theta\\ 0 & 1 & 0\\ \sin\theta & 0 & \cos\theta \end{bmatrix} \\ R_z(\theta)= \begin{bmatrix} \cos\theta & \sin\theta & 0\\ -\sin\theta & \cos\theta & 0\\ 0 & 0 & 1 \end{bmatrix} \tag{1-1}
Rx(θ)=⎣⎡1000cosθ−sinθ0sinθcosθ⎦⎤Ry(θ)=⎣⎡cosθ0sinθ010−sinθ0cosθ⎦⎤Rz(θ)=⎣⎡cosθ−sinθ0sinθcosθ0001⎦⎤(1-1)
分别表示绕基坐标系
x
,
y
,
z
x,y,z
x,y,z轴旋转
θ
\theta
θ后的旋转矩阵。
[
x
y
z
]
=
R
(
θ
)
[
x
′
y
′
z
′
]
(1-2)
\begin{bmatrix} x\\y\\z \end{bmatrix} = R(\theta) \begin{bmatrix}x'\\y'\\z'\end{bmatrix} \tag{1-2}
⎣⎡xyz⎦⎤=R(θ)⎣⎡x′y′z′⎦⎤(1-2)
我们用一个通用的旋转矩阵来表示从机体坐标系
O
b
x
b
y
b
z
b
O_bx_by_bz_b
Obxbybzb到地球坐标系
O
e
x
e
y
e
z
e
O_ex_ey_ez_e
Oexeyeze的旋转矩阵,滚转角:绕x轴转
ϕ
\phi
ϕ;俯仰角:绕y轴转
θ
\theta
θ;偏航角:绕z轴转
ψ
\psi
ψ,则有
R
b
e
(
ϕ
,
θ
,
ψ
)
=
R
(
ϕ
)
R
(
θ
)
R
(
ψ
)
=
[
1
0
0
0
cos
ϕ
sin
ϕ
0
−
sin
ϕ
cos
ϕ
]
[
cos
θ
0
−
sin
θ
0
1
0
sin
θ
0
cos
θ
]
[
cos
ψ
sin
ψ
0
−
sin
ψ
cos
ψ
0
0
0
1
]
=
[
cos
θ
cos
ψ
cos
ψ
sin
θ
sin
ϕ
−
sin
ψ
cos
ϕ
cos
ψ
sin
θ
cos
ϕ
+
sin
ψ
sin
ϕ
cos
θ
sin
ψ
sin
ψ
sin
θ
sin
ϕ
+
cos
ψ
cos
ϕ
sin
ψ
sin
θ
cos
ϕ
−
cos
ψ
sin
ϕ
−
sin
θ
sin
ϕ
cos
θ
cos
ϕ
cos
θ
]
(1-3)
\begin{aligned} R_b^e(\phi,\theta,\psi)&=R(\phi)R(\theta)R(\psi)\\ &= \begin{bmatrix} 1 & 0 & 0\\ 0 & \cos\phi & \sin \phi\\ 0 & -\sin \phi & \cos\phi \end{bmatrix} \begin{bmatrix} \cos\theta & 0 & -\sin\theta\\ 0 & 1 & 0\\ \sin\theta & 0 & \cos\theta \end{bmatrix} \begin{bmatrix} \cos\psi & \sin\psi & 0\\ -\sin\psi & \cos\psi & 0\\ 0 & 0 & 1 \end{bmatrix} \\ &= \begin{bmatrix} \cos\theta \cos\psi & \cos\psi \sin\theta \sin\phi-\sin\psi\cos\phi &\cos\psi \sin\theta \cos\phi + \sin\psi\sin\phi \\ \cos\theta \sin\psi & \sin\psi \sin\theta \sin\phi+\cos\psi\cos\phi &\sin\psi \sin\theta \cos\phi - \cos\psi\sin\phi \\ -\sin\theta & \sin\phi\cos\theta & \cos\phi\cos\theta\\ \end{bmatrix} \end{aligned} \tag{1-3}
Rbe(ϕ,θ,ψ)=R(ϕ)R(θ)R(ψ)=⎣⎡1000cosϕ−sinϕ0sinϕcosϕ⎦⎤⎣⎡cosθ0sinθ010−sinθ0cosθ⎦⎤⎣⎡cosψ−sinψ0sinψcosψ0001⎦⎤=⎣⎡cosθcosψcosθsinψ−sinθcosψsinθsinϕ−sinψcosϕsinψsinθsinϕ+cosψcosϕsinϕcosθcosψsinθcosϕ+sinψsinϕsinψsinθcosϕ−cosψsinϕcosϕcosθ⎦⎤(1-3)
[ x e y e z e ] = R ( ϕ , θ , ψ ) [ x b y b z b ] (1-4) \begin{bmatrix}x_e\\y_e\\z_e\end{bmatrix}=R(\phi,\theta,\psi)\begin{bmatrix}x_b\\y_b\\z_b\end{bmatrix} \tag{1-4} ⎣⎡xeyeze⎦⎤=R(ϕ,θ,ψ)⎣⎡xbybzb⎦⎤(1-4)
2 非线性动力学模型2
2.1 电机模型
电机旋翼产生的力与转速的平方成正比,单个旋翼的升力可以表示为:
F
i
=
c
T
⋅
Ω
i
2
,
i
=
(
1
,
2
,
3
,
4
)
(2-1)
F_i = c_T\cdot \Omega_i^2\quad ,i=(1,2,3,4) \tag{2-1}
Fi=cT⋅Ωi2,i=(1,2,3,4)(2-1)
式中,
c
T
c_T
cT为电机拉力系数。则旋翼产生的总升力为
T
=
∑
i
4
F
i
(2-2)
T=\sum_{i}^4{F_i} \tag{2-2}
T=i∑4Fi(2-2)
轴的陀螺力矩
τ
g
y
o
=
ω
×
J
r
Ω
\tau_{gyo}=\omega\times J_r\Omega
τgyo=ω×JrΩ,其中
J
r
=
[
J
r
x
J
r
y
J
r
z
]
J_r=\begin{bmatrix}J_{rx}& &\\ &J_{ry}&\\ &&J_{rz}\end{bmatrix}
Jr=⎣⎡JrxJryJrz⎦⎤为电机的惯性矩阵。
τ
g
y
o
=
[
τ
g
y
o
,
ϕ
τ
g
y
o
,
θ
τ
g
y
o
,
ψ
]
=
[
J
r
x
(
Ω
1
−
Ω
2
+
Ω
3
−
Ω
4
)
q
J
r
y
(
−
Ω
1
+
Ω
2
−
Ω
3
+
Ω
4
)
p
0
]
(2-3)
\tau_{gyo}= \begin{bmatrix} \tau_{gyo,\phi}\\ \tau_{gyo,\theta}\\ \tau_{gyo,\psi} \end{bmatrix} = \begin{bmatrix} J_{rx}(\Omega_1-\Omega_2+\Omega_3-\Omega_4)q\\ J_{ry}(-\Omega_1+\Omega_2-\Omega_3+\Omega_4)p\\ 0 \end{bmatrix} \tag{2-3}
τgyo=⎣⎡τgyo,ϕτgyo,θτgyo,ψ⎦⎤=⎣⎡Jrx(Ω1−Ω2+Ω3−Ω4)qJry(−Ω1+Ω2−Ω3+Ω4)p0⎦⎤(2-3)
当电机高速旋转的时候,相当于一个陀螺。高速旋转的陀螺是非常稳定的个体,具有保持自身轴向不变的能力。因此如果有外力想改变陀螺转轴的方向,那么会产生一个陀螺力矩来抵抗这种改变。
τ
=
[
τ
x
τ
y
τ
z
]
T
\tau=[\tau_{x}\quad \tau_{y}\quad \tau_{z}]^T
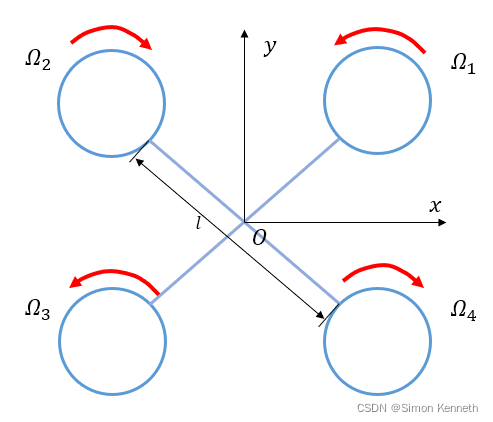
τ=[τxτyτz]T为螺旋桨在机体轴上产生的力矩。以X型四旋翼为例,从右上角开始逆时针电机编号依次为1234,则
τ
=
[
τ
x
τ
y
τ
z
]
=
[
2
2
l
c
M
(
−
Ω
1
2
+
Ω
2
2
+
Ω
3
2
−
Ω
4
2
)
2
2
l
c
M
(
Ω
1
2
+
Ω
2
2
−
Ω
3
2
−
Ω
4
2
)
c
M
(
Ω
1
2
−
Ω
2
2
+
Ω
3
2
−
Ω
4
2
)
]
(2-4)
\tag{2-4} \tau=\begin{bmatrix} \tau_x\\ \tau_{y} \\ \tau_{z} \end{bmatrix}= \begin{bmatrix} \frac{\sqrt2}{2}lc_M(-\Omega_1^2 + \Omega_2^2 + \Omega_3^2 -\Omega_4^2)\\ \frac{\sqrt2}{2}lc_M(\Omega_1^2 + \Omega_2^2 - \Omega_3^2 -\Omega_4^2)\\ c_M(\Omega_1^2 - \Omega_2^2 + \Omega_3^2 -\Omega_4^2)\\ \end{bmatrix}
τ=⎣⎡τxτyτz⎦⎤=⎣⎢⎡22lcM(−Ω12+Ω22+Ω32−Ω42)22lcM(Ω12+Ω22−Ω32−Ω42)cM(Ω12−Ω22+Ω32−Ω42)⎦⎥⎤(2-4)
式中,
l
l
l为旋翼质心到整个四旋翼质心的距离,
c
M
c_M
cM为电机的力矩系数。
2.2 外力平衡方程(平动动力学)
质心运动方程为
d
(
m
V
⃗
)
d
t
=
F
⃗
(2-5)
\frac{\mathrm{d}(m\vec{V})}{\mathrm{d}t}=\vec{F} \tag{2-5}
dtd(mV)=F(2-5)
式中,
V
=
[
v
x
,
v
y
,
v
z
]
T
V=[v_x,v_y,v_z]^T
V=[vx,vy,vz]T为无人机相对地面坐标系的速度向量,
F
⃗
\vec{F}
F为作用在无人机上的合外力向量。
地面坐标系下四旋翼所受阻力为
[
f
x
f
y
f
z
]
=
[
K
1
x
˙
K
2
y
˙
K
3
z
˙
]
(2-6)
\begin{bmatrix} f_x\\f_y\\f_z \end{bmatrix}= \begin{bmatrix} K_1\dot{x}\\K_2\dot{y}\\K_3\dot{z} \end{bmatrix} \tag{2-6}
⎣⎡fxfyfz⎦⎤=⎣⎡K1x˙K2y˙K3z˙⎦⎤(2-6)
式中,
K
i
K_i
Ki为空气阻力系数。则惯性坐标系下外力平衡方程为
m
[
x
¨
y
¨
z
¨
]
=
m
g
[
0
0
1
]
−
R
T
[
0
0
1
]
−
[
K
1
x
˙
K
2
y
˙
K
3
z
˙
]
(2-7)
m\begin{bmatrix} \ddot{x}\\\ddot{y}\\\ddot{z} \end{bmatrix}= mg\begin{bmatrix} 0\\0\\1 \end{bmatrix} - RT \begin{bmatrix} 0\\0\\1 \end{bmatrix} - \begin{bmatrix} K_1\dot{x}\\K_2\dot{y}\\K_3\dot{z} \end{bmatrix} \tag{2-7}
m⎣⎡x¨y¨z¨⎦⎤=mg⎣⎡001⎦⎤−RT⎣⎡001⎦⎤−⎣⎡K1x˙K2y˙K3z˙⎦⎤(2-7)
进一步展开可得
[
x
¨
y
¨
z
¨
]
=
[
−
T
m
(
cos
ψ
sin
θ
cos
ϕ
+
sin
ψ
sin
ϕ
)
−
K
1
x
˙
−
T
m
(
sin
ψ
sin
θ
cos
ϕ
−
cos
ψ
sin
ϕ
)
−
K
2
y
˙
g
−
T
m
(
cos
ϕ
cos
θ
)
−
K
3
z
˙
]
(2-8)
\begin{bmatrix} \ddot{x}\\\ddot{y}\\\ddot{z} \end{bmatrix}= \begin{bmatrix} -\frac{T}{m}(\cos\psi \sin\theta \cos\phi + \sin\psi\sin\phi)-K_1\dot{x} \\ -\frac{T}{m}(\sin\psi \sin\theta \cos\phi - \cos\psi\sin\phi)-K_2\dot{y} \\ g-\frac{T}{m} (\cos\phi\cos\theta) -K_3\dot{z}\\ \end{bmatrix} \tag{2-8}
⎣⎡x¨y¨z¨⎦⎤=⎣⎡−mT(cosψsinθcosϕ+sinψsinϕ)−K1x˙−mT(sinψsinθcosϕ−cosψsinϕ)−K2y˙g−mT(cosϕcosθ)−K3z˙⎦⎤(2-8)
2.3 外力矩平衡方程(转动动力学)
由欧拉方程可知,四旋翼绕质心的转动的动力学方程为
M
⃗
=
J
ω
⃗
˙
+
ω
⃗
×
J
ω
⃗
=
τ
−
τ
g
y
o
−
τ
f
(2-9)
\begin{aligned} \vec{M}&=J\dot{\vec\omega}+\vec\omega\times J\vec\omega \tag{2-9} \\ &=\bold{\tau}-\tau_{gyo}-\tau_f \end{aligned}
M=Jω˙+ω×Jω=τ−τgyo−τf(2-9)
式中
ω
=
[
p
,
q
,
r
]
T
\omega=[p,q,r]^T
ω=[p,q,r]T为飞行器相对机体坐标系的角速度向量,
J
=
[
J
x
J
y
J
z
]
J=\begin{bmatrix}J_x& &\\ &J_y&\\ &&J_z\end{bmatrix}
J=⎣⎡JxJyJz⎦⎤为四旋翼无人机在机体坐标系三个轴上的转动惯量,由于我们假设四旋翼的重心正好位于几何中心,因此转动惯量
J
x
y
=
J
y
x
=
J
x
z
=
J
z
x
=
J
y
z
=
J
z
y
=
0
J_{xy}=J_{yx}=J_{xz}=J_{zx}=J{yz}=J_{zy}=0
Jxy=Jyx=Jxz=Jzx=Jyz=Jzy=0。
M
⃗
\vec{M}
M为作用在飞行器上的合外力矩,
τ
f
=
K
f
ω
\tau_f=K_f\omega
τf=Kfω为空气阻力矩。
式(2-9a)展开后可得
[
J
x
p
˙
J
y
q
˙
J
z
r
˙
]
=
[
p
q
r
]
×
[
J
x
p
J
y
q
J
z
r
]
=
[
0
−
r
q
r
0
−
p
−
q
p
0
]
×
[
J
x
p
J
y
q
J
z
r
]
=
[
q
r
(
J
z
−
J
y
)
p
r
(
J
x
−
J
z
)
p
q
(
J
y
−
J
x
)
]
(2-10)
\begin{aligned} \begin{bmatrix} J_x\dot p \\ J_y\dot q \\ J_z\dot r \\ \end{bmatrix} &= \begin{bmatrix} p \\ q \\ r \\ \end{bmatrix} \times \begin{bmatrix} J_xp \\ J_yq \\ J_zr \\ \end{bmatrix} \\ &=\begin{bmatrix} 0&-r&q\\ r&0&-p\\ -q&p&0 \end{bmatrix} \times \begin{bmatrix} J_xp \\ J_yq \\ J_zr\end{bmatrix}\\ &=\begin{bmatrix} qr(J_z-J_y) \\ pr(J_x-J_z) \\ pq(J_y-J_x) \\ \end{bmatrix} \end{aligned} \tag{2-10}
⎣⎡Jxp˙Jyq˙Jzr˙⎦⎤=⎣⎡pqr⎦⎤×⎣⎡JxpJyqJzr⎦⎤=⎣⎡0r−q−r0pq−p0⎦⎤×⎣⎡JxpJyqJzr⎦⎤=⎣⎡qr(Jz−Jy)pr(Jx−Jz)pq(Jy−Jx)⎦⎤(2-10)
联立(2-10)和(2-9b)可得
[
p
˙
q
˙
r
˙
]
=
[
(
J
y
−
J
z
)
J
x
q
r
+
J
r
z
J
x
(
Ω
1
−
Ω
2
+
Ω
3
−
Ω
4
)
q
+
τ
x
J
x
−
τ
f
x
J
x
(
J
z
−
J
x
)
J
y
p
r
+
J
r
z
J
y
(
−
Ω
1
+
Ω
2
−
Ω
3
+
Ω
4
)
p
+
τ
y
J
y
−
τ
f
y
J
y
(
J
x
−
J
y
)
J
z
p
q
+
τ
z
J
z
−
τ
f
z
J
z
]
(2-11)
\begin{bmatrix} \dot p \\ \dot q \\ \dot r \\ \end{bmatrix}= \begin{bmatrix} \begin{aligned} &\frac{(J_y-J_z)}{J_x}qr + \frac{J_{rz}}{J_x}(\Omega_1-\Omega_2+\Omega_3-\Omega_4)q + \frac{\tau_x}{J_x}-\frac{\tau_{fx}}{J_x} \\ &\frac{(J_z-J_x)}{J_y}pr + \frac{J_{rz}}{J_y}(-\Omega_1+\Omega_2-\Omega_3+\Omega_4)p + \frac{\tau_y}{J_y}-\frac{\tau_{fy}}{J_y} \\ &\frac{(J_x-J_y)}{J_z}pq + \frac{\tau_z}{J_z}-\frac{\tau_{fz}}{J_z}\\ \end{aligned} \end{bmatrix} \tag{2-11}
⎣⎡p˙q˙r˙⎦⎤=⎣⎢⎢⎢⎢⎢⎢⎢⎡Jx(Jy−Jz)qr+JxJrz(Ω1−Ω2+Ω3−Ω4)q+Jxτx−JxτfxJy(Jz−Jx)pr+JyJrz(−Ω1+Ω2−Ω3+Ω4)p+Jyτy−JyτfyJz(Jx−Jy)pq+Jzτz−Jzτfz⎦⎥⎥⎥⎥⎥⎥⎥⎤(2-11)
- 机体坐标系下角速度和惯性坐标系下角速度的关系为3
[ ϕ ˙ θ ˙ ψ ˙ ] = [ 1 sin ϕ tan θ cos ϕ tan θ 0 cos ϕ − sin ϕ 0 ( sin ϕ / cos θ ) ( cos ϕ / cos θ ) ] [ p q r ] (2-12) \begin{bmatrix} \dot \phi\\ \dot \theta \\ \dot \psi \end{bmatrix} = \begin{bmatrix} 1 & \sin\phi\tan\theta & \cos\phi\tan\theta \\ 0 & \cos\phi & -\sin\phi \\ 0 & (\sin\phi/\cos\theta) & (\cos\phi/\cos\theta) \end{bmatrix} \begin{bmatrix} p\\ q \\ r \end{bmatrix} \tag{2-12} ⎣⎡ϕ˙θ˙ψ˙⎦⎤=⎣⎡100sinϕtanθcosϕ(sinϕ/cosθ)cosϕtanθ−sinϕ(cosϕ/cosθ)⎦⎤⎣⎡pqr⎦⎤(2-12)
[ p q r ] = [ 1 0 − sin θ 0 cos ϕ cos θ sin ϕ 0 − sin ϕ cos θ cos ϕ ] [ ϕ ˙ θ ˙ ψ ˙ ] (2-13) \begin{bmatrix} p\\ q \\ r \end{bmatrix} = \begin{bmatrix} 1&0&-\sin\theta\\ 0&\cos\phi & \cos\theta\sin\phi\\ 0&-\sin\phi & \cos\theta\cos\phi \end{bmatrix} \begin{bmatrix} \dot \phi\\ \dot \theta \\ \dot \psi \end{bmatrix} \tag{2-13} ⎣⎡pqr⎦⎤=⎣⎡1000cosϕ−sinϕ−sinθcosθsinϕcosθcosϕ⎦⎤⎣⎡ϕ˙θ˙ψ˙⎦⎤(2-13)
2.4 飞行控制刚体模型
联立(2-12)和(2-10),并考虑在机身稳定点处做线性化(
θ
→
0
\theta\rightarrow0
θ→0)可得
[
ϕ
¨
θ
¨
ψ
¨
]
=
[
1
J
x
[
τ
x
+
q
r
(
J
x
−
J
z
)
−
J
x
r
q
Ω
g
y
o
−
τ
f
x
]
1
J
y
[
τ
y
+
p
r
(
J
z
−
J
x
)
+
J
y
r
q
Ω
g
y
o
−
τ
f
y
]
1
J
z
[
τ
z
+
p
q
(
J
x
−
J
y
)
]
(2-14)
\begin{bmatrix} \ddot \phi\\ \ddot \theta \\ \ddot \psi \end{bmatrix} = \begin{bmatrix} \begin{aligned} &\frac{1}{J_x}[\tau_x+qr(J_x-J_z)-J_{xr}q\Omega_{gyo}-\tau_{fx}]\\ &\frac{1}{J_y}[\tau_y+pr(J_z-J_x)+J_{yr}q\Omega_{gyo}-\tau_{fy}]\\ &\frac{1}{J_z}[\tau_z+pq(J_x-J_y) \end{aligned} \end{bmatrix} \tag{2-14}
⎣⎡ϕ¨θ¨ψ¨⎦⎤=⎣⎢⎢⎢⎢⎢⎢⎡Jx1[τx+qr(Jx−Jz)−JxrqΩgyo−τfx]Jy1[τy+pr(Jz−Jx)+JyrqΩgyo−τfy]Jz1[τz+pq(Jx−Jy)⎦⎥⎥⎥⎥⎥⎥⎤(2-14)
式中 Ω g y o = Ω 1 − Ω 2 + Ω 3 − Ω 4 \Omega_{gyo}=\Omega_1-\Omega_2+\Omega_3-\Omega_4 Ωgyo=Ω1−Ω2+Ω3−Ω4。
将式(2-8)和(2-14)写在一起,并令
[
U
1
U
2
U
3
U
4
]
T
=
[
T
τ
x
τ
y
τ
z
]
[U_1\quad U_2\quad U_3\quad U_4 ]^T=[T\quad \tau_{x}\quad \tau_{y}\quad \tau_{z}]
[U1U2U3U4]T=[Tτxτyτz]4(动力学模型的输入量),可得
[
x
¨
y
¨
z
¨
ϕ
¨
θ
¨
ψ
¨
]
=
[
−
T
m
(
cos
ψ
sin
θ
cos
ϕ
+
sin
ψ
sin
ϕ
)
−
K
1
x
˙
−
T
m
(
sin
ψ
sin
θ
cos
ϕ
−
cos
ψ
sin
ϕ
)
−
K
2
y
˙
g
−
T
m
(
cos
ϕ
cos
θ
)
−
K
3
z
˙
1
J
x
[
τ
x
+
q
r
(
J
x
−
J
z
)
−
J
x
r
q
Ω
g
y
o
−
τ
f
x
]
1
J
y
[
τ
y
+
p
r
(
J
z
−
J
x
)
+
J
y
r
q
Ω
g
y
o
−
τ
f
y
]
1
J
z
[
τ
z
+
p
q
(
J
x
−
J
y
)
]
(2-15)
\begin{bmatrix} \ddot{x}\\\ddot{y}\\\ddot{z} \\ \ddot \phi\\ \ddot \theta \\ \ddot \psi \end{bmatrix}= \begin{bmatrix} \begin{aligned} &-\frac{T}{m}(\cos\psi \sin\theta \cos\phi + \sin\psi\sin\phi)-K_1\dot{x} \\ &-\frac{T}{m}(\sin\psi \sin\theta \cos\phi - \cos\psi\sin\phi)-K_2\dot{y} \\ &g-\frac{T}{m} (\cos\phi\cos\theta) -K_3\dot{z}\\ &\frac{1}{J_x}[\tau_x+qr(J_x-J_z)-J_{xr}q\Omega_{gyo}-\tau_{fx}]\\ &\frac{1}{J_y}[\tau_y+pr(J_z-J_x)+J_{yr}q\Omega_{gyo}-\tau_{fy}]\\ &\frac{1}{J_z}[\tau_z+pq(J_x-J_y) \end{aligned} \end{bmatrix} \tag{2-15}
⎣⎢⎢⎢⎢⎢⎢⎡x¨y¨z¨ϕ¨θ¨ψ¨⎦⎥⎥⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡−mT(cosψsinθcosϕ+sinψsinϕ)−K1x˙−mT(sinψsinθcosϕ−cosψsinϕ)−K2y˙g−mT(cosϕcosθ)−K3z˙Jx1[τx+qr(Jx−Jz)−JxrqΩgyo−τfx]Jy1[τy+pr(Jz−Jx)+JyrqΩgyo−τfy]Jz1[τz+pq(Jx−Jy)⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤(2-15)
式(2-15)即为四旋翼飞行器的非线性六自由度模型。