GN和LM的算法流程,优劣分析
参考博客
参考博客: https://blog.csdn.net/heshaofeng2ly/article/details/105812746#3GN_50
参考博客:LM算法流程
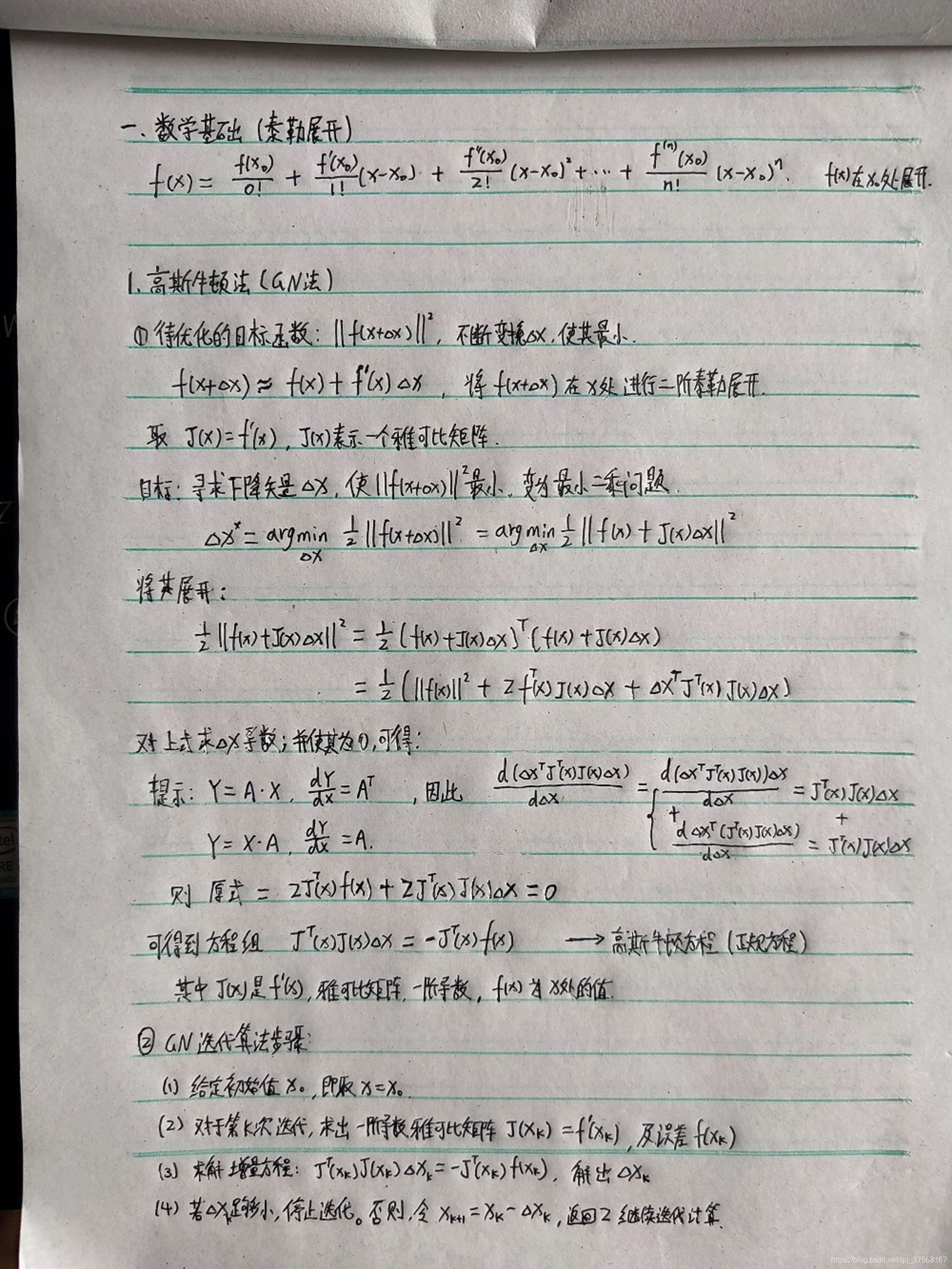
数学基础(泰勒展开)
泰勒展开公式:
f
(
x
)
=
f
(
x
0
)
0
!
+
f
′
(
x
0
)
1
!
(
x
−
x
0
)
+
f
′
′
(
x
0
)
2
!
(
x
−
x
0
)
2
+
.
.
.
.
.
.
+
f
(
n
)
(
x
0
)
n
!
(
x
−
x
0
)
n
f(x)=\frac{f(x_{0})}{0!}+ \frac{f^{'}(x_{0})}{1!}(x-x_{0})+\frac{f^{''}(x_{0})}{2!}(x-x_{0})^{2}+......+\frac{f^{(n)}(x_{0})}{n!}(x-x_{0})^{n}
f(x)=0!f(x0)+1!f′(x0)(x−x0)+2!f′′(x0)(x−x0)2+......+n!f(n)(x0)(x−x0)n
该式表示 f ( x ) f(x) f(x)在 x 0 x_{0} x0处的 n n n阶泰勒展开.
1. 高斯牛顿法(GN法)
Gauss Newton 是最优化算法里面最简单的方法之一。它的思想是将 f ( x ) f(x) f(x) 进行一阶的泰勒展开.
1.1 基本原理
待优化的目标函数: ∣ ∣ f ( x + Δ x ) ∣ ∣ 2 ||f(x+\Delta{x})||^{2} ∣∣f(x+Δx)∣∣2
将目标函数中
f
(
x
+
Δ
x
)
f(x+\Delta{x})
f(x+Δx) 进行一阶泰勒展开可得:
f
(
x
+
Δ
x
)
≈
f
(
x
)
+
f
′
(
x
)
Δ
x
f(x+\Delta{x})\approx{f(x)+f^{'}(x)\Delta{x}}
f(x+Δx)≈f(x)+f′(x)Δx
取
J
(
x
)
=
f
′
(
x
)
,
J
(
x
)
J(x)=f^{'}(x), J(x)
J(x)=f′(x),J(x)表示
f
(
x
)
f(x)
f(x)的一阶导数,是雅克比矩阵.
目的: 通过不断寻找下降矢量
Δ
x
\Delta{x}
Δx, 使目标函数
∣
∣
f
(
x
+
Δ
x
)
∣
∣
2
||f(x+\Delta{x})||^{2}
∣∣f(x+Δx)∣∣2达到最小值, 变为线性的最小二乘问题:
Δ
x
∗
=
arg min
Δ
x
1
2
∣
∣
f
(
x
+
Δ
x
)
∣
∣
2
=
arg min
Δ
x
1
2
∣
∣
f
(
x
)
+
J
(
x
)
Δ
x
∣
∣
2
\Delta{x}^{*}=\argmin_{\Delta{x}}\frac{1}{2}||f(x+\Delta{x})||^{2}=\argmin_{\Delta{x}}\frac{1}{2}||f(x)+J(x)\Delta{x}||^{2}
Δx∗=Δxargmin21∣∣f(x+Δx)∣∣2=Δxargmin21∣∣f(x)+J(x)Δx∣∣2将其展开:
1
2
∣
∣
f
(
x
)
+
J
(
x
)
Δ
x
∣
∣
2
=
1
2
[
f
(
x
)
+
J
(
x
)
Δ
x
]
T
[
f
(
x
)
+
J
(
x
)
Δ
x
]
\frac{1}{2}||f(x)+J(x)\Delta{x}||^{2}=\frac{1}{2}[f(x)+J(x)\Delta{x}]^{T}[f(x)+J(x)\Delta{x}]
21∣∣f(x)+J(x)Δx∣∣2=21[f(x)+J(x)Δx]T[f(x)+J(x)Δx]
=
1
2
[
∣
f
(
x
)
∣
∣
2
+
f
T
(
x
)
J
(
x
)
Δ
x
+
Δ
x
T
J
T
(
x
)
f
(
x
)
+
Δ
x
T
J
T
(
x
)
J
(
x
)
Δ
x
]
=\frac{1}{2}[ |f(x)||^{2}+f^{T}(x)J(x)\Delta{x}+\Delta{x}^{T}J^{T}(x)f(x)+\Delta{x}^{T}J^{T}(x)J(x)\Delta{x} ]
=21[∣f(x)∣∣2+fT(x)J(x)Δx+ΔxTJT(x)f(x)+ΔxTJT(x)J(x)Δx]这里需要注意的是
Δ
x
T
J
T
(
x
)
f
(
x
)
=
(
f
T
(
x
)
J
(
x
)
Δ
x
)
T
\Delta{x}^{T}J^{T}(x)f(x)=(f^{T}(x)J(x)\Delta{x})^{T}
ΔxTJT(x)f(x)=(fT(x)J(x)Δx)T 而转置不改变值的大小, 两者可以合并, 得到:
1
2
∣
∣
f
(
x
)
+
J
(
x
)
Δ
x
∣
∣
2
=
1
2
[
∣
f
(
x
)
∣
∣
2
+
2
f
T
(
x
)
J
(
x
)
Δ
x
+
Δ
x
T
J
T
(
x
)
J
(
x
)
Δ
x
]
\frac{1}{2}||f(x)+J(x)\Delta{x}||^{2}=\frac{1}{2}[ |f(x)||^{2}+2f^{T}(x)J(x)\Delta{x}+\Delta{x}^{T}J^{T}(x)J(x)\Delta{x} ]
21∣∣f(x)+J(x)Δx∣∣2=21[∣f(x)∣∣2+2fT(x)J(x)Δx+ΔxTJT(x)J(x)Δx]求上式关于 ∆x 的导数,并令其为零:
2
J
T
(
x
)
f
(
x
)
+
2
J
T
(
x
)
J
(
x
)
Δ
x
=
0
2J^{T}(x)f(x)+2J^{T}(x)J(x)\Delta{x}=0
2JT(x)f(x)+2JT(x)J(x)Δx=0
这里需要注意的是:
Y
=
A
∗
X
,
d
Y
d
X
=
A
T
Y=A*X, \frac{dY}{dX}=A^{T}
Y=A∗X,dXdY=AT
Y
=
X
∗
A
,
d
Y
d
X
=
A
Y=X*A, \frac{dY}{dX}=A
Y=X∗A,dXdY=A
d
X
T
d
X
=
I
\frac{dX^{T}}{dX}=I
dXdXT=I
可以得到如下方程组:
J
T
(
x
)
J
(
x
)
Δ
x
=
−
J
T
(
x
)
f
(
x
)
J^{T}(x)J(x)\Delta{x}=-J^{T}(x)f(x)
JT(x)J(x)Δx=−JT(x)f(x)注意,我们要求解的变量是 ∆x,因此这是一个线性方程组,我们称它为增量方程,也可以称为高斯牛顿方程或者正规方程.
其中
J
(
x
)
=
f
′
(
x
)
J(x)=f^{'}(x)
J(x)=f′(x)表示
f
(
x
)
f(x)
f(x)的一阶导数,是雅克比矩阵.
f
(
x
)
f(x)
f(x)为x处的值
1.2 GN迭代算法步骤
- 给定初始值 x 0 x_{0} x0, 即取 x = x 0 x=x_{0} x=x0.
- 对于第k次迭代,期初一阶导数雅克比矩阵 J ( x k ) = f ′ ( x k ) J(x_{k})=f^{'}(x_{k}) J(xk)=f′(xk), 以及目标函数(误差) f ( x k ) f(x_{k}) f(xk).
- 求解增量方程: J T ( x k ) J ( x k ) Δ x k = − J T ( x k ) f ( x k ) J^{T}(x_{k})J(x_{k})\Delta{x_{k}}=-J^{T}(x_{k})f(x_{k}) JT(xk)J(xk)Δxk=−JT(xk)f(xk), 将(2)的值带入方程,求出 Δ x k \Delta{x_{k}} Δxk.
- 若 Δ x k \Delta{x_{k}} Δxk足够小,停止迭代. 否则令 x k + 1 = x k + Δ x k x_{k+1}=x_{k}+\Delta{x_{k}} xk+1=xk+Δxk, 返回(2), 继续迭代计算.
1.3 优缺点
-
优点: 高斯牛顿(Gauss-Newton)法是对牛顿法的一种改进,它用雅克比矩阵的乘积近似代替牛顿法中的二阶Hessian 矩阵,从而省略了求二阶Hessian 矩阵的计算,计算量降低.
-
缺点1: 在高斯牛顿法中,用来近似Hessian矩阵的 J T J J^{T}J JTJ可能是奇异矩阵(不可逆)或者病态的,此时会导致方程无解,稳定性很差,算法不收敛.
-
缺点2: 由于采用二阶泰勒展开来进行的推导,而泰勒展开只是在一个较小的范围内的近似,因此如果高斯牛顿法计算得到的步长较大的话,上述的近似将不再准确,也会导致算法不收敛.
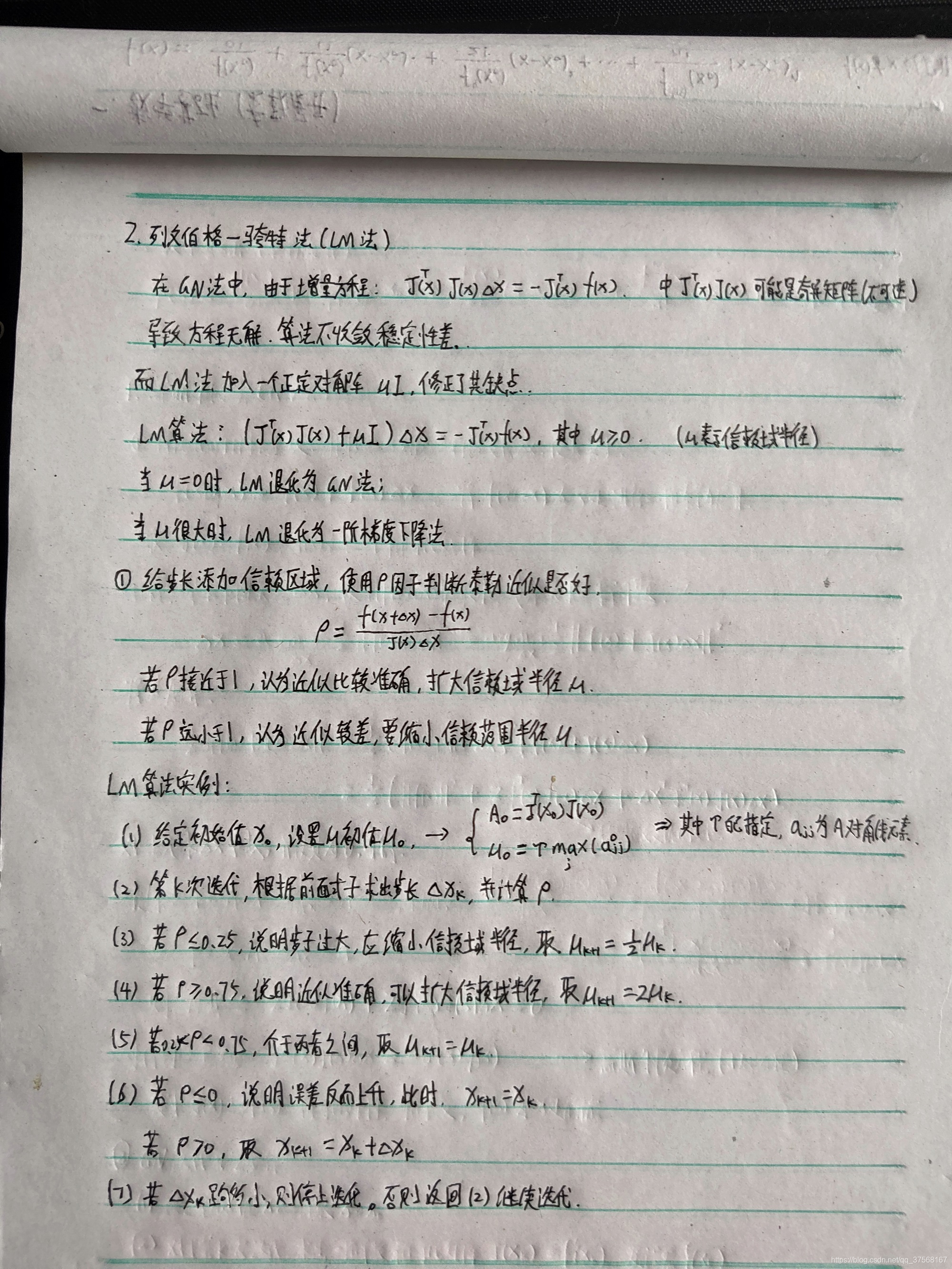
2. 列文伯格-马夸特法(LM法)
Levenberg-Marquardt (LM)在一定程度上修正了高斯牛顿法的缺点,因此它比高斯牛顿法更加鲁棒,不过是以牺牲一定的收敛速度为代价–它的收敛速度比高斯牛顿法慢. 也被称为阻尼牛顿法.
2.1 基本原理
LM法加入一个正定对角阵 u I uI uI, 一定程度上修正了GN的缺点.
LM算法增量方程:
( J T ( x ) J ( x ) + u I ) Δ x = − J T ( x ) f ( x ) (J^{T}(x)J(x)+uI)\Delta{x}=-J^{T}(x)f(x) (JT(x)J(x)+uI)Δx=−JT(x)f(x)其中 u ≥ 0 , u u\geq{0}, u u≥0,u表示信赖域半径.
- 当 u = 0 u=0 u=0时,LM退化为高斯牛顿法(GN)
- 当 u u u很大时,LM退化为一阶梯度下降法
LM法会在每一次迭代计算因子
ρ
\rho
ρ来判断泰勒近似是否良好,并根据因子
ρ
\rho
ρ,动态扩大或缩小信赖域半径
u
u
u.
ρ
=
f
(
x
+
Δ
x
)
−
f
(
x
)
J
(
x
)
Δ
x
\rho=\frac{f(x+\Delta{x})-f(x)}{J(x)\Delta{x}}
ρ=J(x)Δxf(x+Δx)−f(x)
- 若因子 ρ \rho ρ接近于1, 则认为泰勒近似比较准确, 可以扩大信赖域半径 u u u
- 若因子 ρ \rho ρ远小于1, 则认为泰勒近似结果较差, 可以缩小信赖域半径 u u u
2.2 LM迭代算法步骤
-
给定初始值 x 0 x_{0} x0, 设置 u u u初始值 u 0 u_{0} u0
A 0 = J T ( x 0 ) J ( x 0 ) A_{0}=J^{T}(x_{0})J(x_{0}) A0=JT(x0)J(x0) u 0 = τ max i ( a i i 0 ) u_{0}=\tau \max_{i}(a_{ii}^{0}) u0=τimax(aii0)其中 τ \tau τ需要自己设定, a i i a_{ii} aii为 A 0 A_{0} A0的对角线元素. -
第k次迭代,根据前面的公式求出步长 Δ x k \Delta x_{k} Δxk, 并计算此时的 ρ k \rho_{k} ρk.
-
根据 ρ k \rho_{k} ρk的取值来调整信赖域半径:
- (1) 若 ρ k ≤ 0.25 \rho_{k}\leq0.25 ρk≤0.25,说明步子过大, 泰勒近似较差,应缩小信赖域半径, 取 u k + 1 = 1 2 u k u_{k+1}=\frac{1}{2}u_{k} uk+1=21uk
- (2) 若 ρ k ≥ 0.75 \rho_{k}\geq0.75 ρk≥0.75,说明步子较小, 泰勒近似准确,应扩大信赖域半径, 取 u k + 1 = 2 u k u_{k+1}=2u_{k} uk+1=2uk
- (3) 若 0.25 < ρ k < 0.75 0.25<\rho_{k}<0.75 0.25<ρk<0.75,说明 泰勒近似介于两者之间,应保持此时的信赖域半径, 取 u k + 1 = u k u_{k+1}=u_{k} uk+1=uk
-
若 Δ x k \Delta x_{k} Δxk足够小, 则停止迭代, 否则根据 ρ k \rho_{k} ρk大小判断 x k + 1 x_{k+1} xk+1应该如何更新. 计算出 x k + 1 x_{k+1} xk+1后返回(2), 继续进行迭代:
- (1) 若 ρ k ≤ 0 \rho_{k}\leq0 ρk≤0,说明误差向着上升而非下降的趋势变化了(与最优化的目标相反),这说明这一步迈得错得“离谱”了,这时不应该走到下一点,而应“原地踏步”,即取 x k + 1 = x k x_{k+1}=x_{k} xk+1=xk
- (2) 若 ρ k ≥ 0 \rho_{k}\geq0 ρk≥0,说明可以向下一步走, 取 x k + 1 = x k + Δ x k x_{k+1}=x_{k}+\Delta x_{k} xk+1=xk+Δxk
2.3 优缺点
- 优点: 在一定程度上修正了高斯牛顿算法不收敛的缺点,同时具备高斯牛顿法和一阶梯度算法的特点, 因此它比高斯牛顿法更加鲁棒.
- 缺点: 由于需要不断计算更新收敛域半径 u u u,不断变化梯度下降步长,会导致收敛速度较慢.