代码随想录算法训练营
—day34
前言
今天是算法营的第34天,希望自己能够坚持下来!
今日任务:
● 62.不同路径
● 63. 不同路径 II
● 343. 整数拆分(思路较难)
● 96. 不同的二叉搜索树(思路较难)
一、62.不同路径
动态规划
思路:
- dp[i][j]的定义为:走到[i,j]位置有多少种路径
- 递归公式:对于dp[i][j]都是由上一个位置或者左边的位置移动得来,所有有
dp[i][j] = dp[i-1][j] + dp[i][j-1] - 初始化:因为递推公式需要上面的位置和左边的位置来推导,所以初始化第一行和左边第一列,且走到这些位置都只有一种路径,dp[i][0] = 1, dp[0][i] = 1
- 遍历顺序:因为递推公式是从前往后的,所以遍历顺序是从前往后
代码如下:
class Solution {
public:
//dp[i][j]含义:走到[i,j]位置有多少种路径
//递推公式:dp[i][j] = dp[i-1][j] + dp[i][j-1]
//初始化: dp[i][0] = 1, dp[0][i] = 1
//遍历顺序:左->右, 上->下
int uniquePaths(int m, int n) {
//int dp[m][n];
vector<vector<int>>dp (m, vector<int>(n,0));
for (int i = 0; i < m; i++) dp[i][0] = 1;
for (int i = 0; i < n; i++) dp[0][i] = 1;
for (int i = 1; i < m; i++) {
for (int j = 1; j < n; j++) {
dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
}
}
return dp[m-1][n-1];
}
};
动态规划空间优化
因为实际上只跟上层对应的格子有关,左边的是由上一次递推而来,所以只需要维护一层的数组,递推公式上就是把dp[i]维度去掉。
代码如下:
class Solution {
public:
//dp[i][j]含义:走到[i,j]位置有多少种路径
//递推公式:dp[i][j] = dp[i-1][j] + dp[i][j-1]
//初始化: dp[i][0] = 1, dp[0][i] = 1
//遍历顺序:左->右, 上->下
int uniquePaths(int m, int n) {
vector<int>dp (n,1); //因为直接上只跟上层对应的格子有关,左边的已知了,所以只需要维护一层的数组
for (int i = 1; i < m; i++) { //i+1:下一层
for (int j = 1; j < n; j++) { //本层从左到右遍历
dp[j] = dp[j] + dp[j - 1]; //本层的第j个格子=上层对应的格子+本层左边的格子
}
}
return dp[n-1];
}
};
二、63. 不同路径 II
思路:
跟62.不同路径的区别就是多了个障碍,如果是障碍的话,就标记相应的dp[i]=0就可以了。
- dp[i][j]的定义为:表示从(0 ,0)出发,到(i, j) 有dp[i][j]条不同的路径。
- 递归公式:因为需要考虑障碍,当(i, j)没有障碍的时候,再推导dp[i][j]
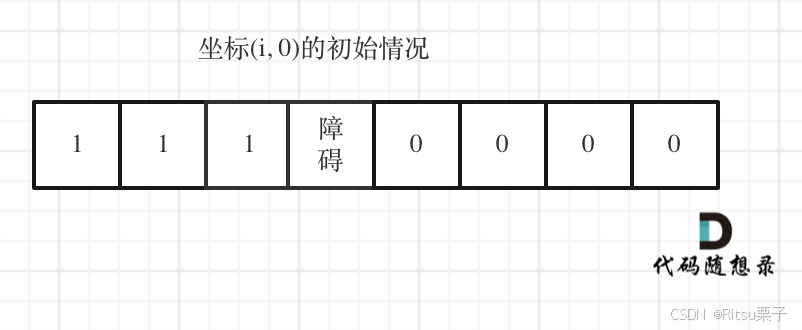
if (obstacleGrid[i][j] == 0) dp[i][j] = dp[i - 1][j] + dp[i][j - 1]; - 初始化:dp[i][0]和dp[0][j]还是一样是1,但是如果有障碍的话,障碍之后(包括障碍)都是走不到的位置了,所以障碍之后的dp[i][0]应该还是初始值0。
- 遍历顺序:因为递推公式是从前往后的,所以遍历顺序是从前往后,从上到下
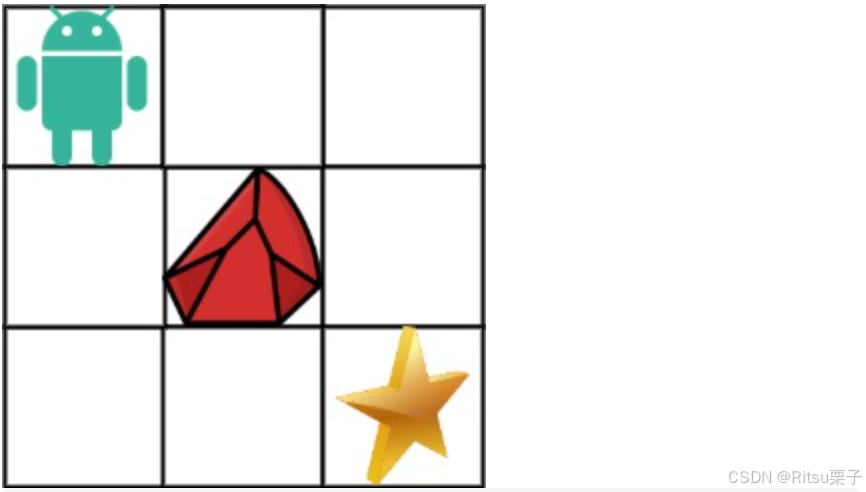
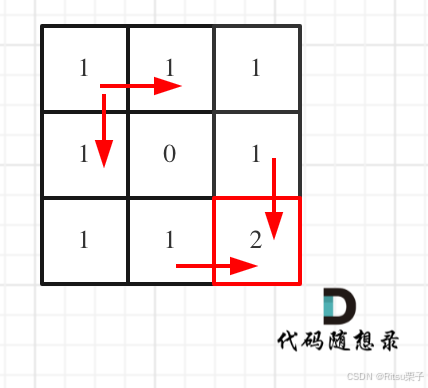
拿示例1来举例如题:
对应的dp table 如图:
动态规划
代码如下:
class Solution {
public:
//dp[i][j]含义:走到[i,j]位置有多少种路径
//递推公式:if(obs[i][j]!= 0) dp[i][j] = dp[i-1][j] + dp[i][j-1]
//初始化: dp[i][0] = 1, dp[0][i] = 1, 当遍历碰到障碍物时,后面的都是0
//遍历顺序:左->右, 上->下
int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {
int m = obstacleGrid.size();
int n = obstacleGrid[0].size();
//如果在起点或终点就有障碍
if (obstacleGrid[0][0] == 1 || obstacleGrid[m-1][n-1] == 1) return 0;
vector<vector<int>>dp (m, vector<int>(n,0));
//初始化,遇到障碍后终止
for (int i = 0; i < n && obstacleGrid[0][i] == 0; i++) dp[0][i] = 1;
for (int i = 0; i < m && obstacleGrid[i][0] == 0; i++) dp[i][0] = 1;
for (int i = 1; i < m; i++) {
for (int j = 1; j < n; j++) {
if (obstacleGrid[i][j] == 1) continue; //有障碍则跳过
dp[i][j] = dp[i-1][j] + dp[i][j-1];
}
}
return dp[m-1][n-1];
}
};
动态规划优化空间版
同样的,因为实际上只跟上层对应的格子有关,左边的是由上一次递推而来,所以只需要维护一层的数组,递推公式上就是把dp[i]维度去掉。
代码如下:
class Solution {
public:
//dp[i][j]含义:走到[i,j]位置有多少种路径
//递推公式:if(obs[i][j]!= 0) dp[i][j] = dp[i-1][j] + dp[i][j-1]
//初始化: dp[i][0] = 1, dp[0][i] = 1, 当遍历碰到障碍物时,后面的都是0
//遍历顺序:左->右, 上->下
int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {
int m = obstacleGrid.size();
int n = obstacleGrid[0].size();
//如果在起点或终点就有障碍
if (obstacleGrid[0][0] == 1 || obstacleGrid[m-1][n-1] == 1) return 0;
vector<int> dp(n,0);
for (int i = 0; i < n && obstacleGrid[0][i] == 0; i++) dp[i] = 1;
for (int i = 1; i < m; i++) {
for (int j = 0; j < n; j++) { //这里要从0开始,因为前面只对obstacleGrid[0][i]进行了判断
//每下一行i+1,都需要判断当前dp[0]是有障碍
if (obstacleGrid[i][j] == 1) dp[j] = 0; //这里不能用continue,不管是否有障碍,都需要更新dp[j]
else if (j != 0)dp[j] = dp[j] + dp[j-1];
}
}
return dp[n-1];
}
};
三、343. 整数拆分
动态规划
思路:
- dp[i]的定义为: 对于整数i,拆分后的最大乘积
- 递归公式:dp[i] 可能来自于两种情况:
①直接分出来的一个j, j与剩余的数相乘:j * (i - j)
②分出来j后,对剩余的数也拆分:j * dp[i-j], dp[i-j]就是对i-j进行拆分后得到最大乘积 - 初始化:dp[0] = 0, dp[1] = 0, dp[2] = 1,那么遍历的时候就可以从3开始
- 遍历顺序:遍历[3,n],每一个数再通过遍历[1,i](枚举从i中拆分出来的j)求出dp[i]
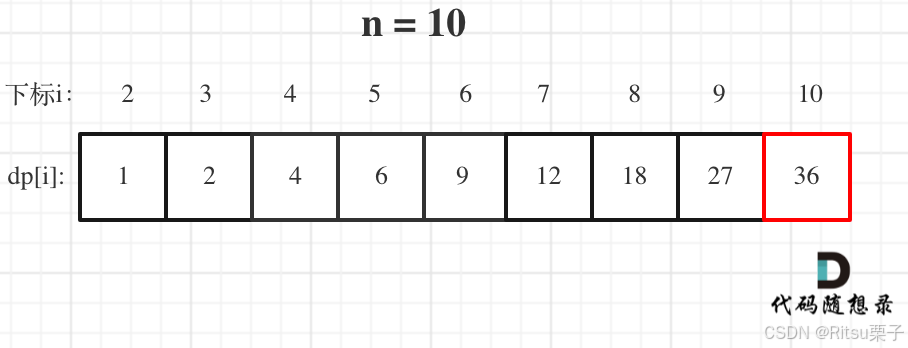
- 举例推导dp数组:
举例当n为10 的时候,dp数组里的数值,如下:
代码如下:
class Solution {
public:
//d[i]:对于整数i,拆分后的最大乘积
//递推公式:dp[i] 可能来自于两种情况:
// 1、直接分出来的一个j, j与剩余的数相乘:j * (i - j)
// 2、分出来j后,最剩余的数也拆分:j * dp[i-j], dp[i-j]就是对i-j进行拆分后得到最大乘积
//初始化:dp[0] = 0, dp[1] = 0, dp[2] = 1
//遍历顺序:遍历[3,n],每一个数再通过遍历[1,i]求出dp[i]
int integerBreak(int n) {
vector<int> dp(n + 1, 0); //因为要求的是d[n],创建一个n+1大小的数组
dp[2] = 1;
for (int i = 3; i <= n; i++) {
//注意 枚举j的时候,是从1开始的。从0开始的话,那么让拆分一个数拆个0,求最大乘积就没有意义了。
for (int j = 1; j <= i/2; j++) { //这里直到i/2就结束了,因为最大乘积不会在i/2之后出现
dp[i] = max(max((i - j) * j, j * dp[i-j]), dp[i]);
}
}
return dp[n];
}
};
贪心算法
本题也可以用贪心,每次拆成n个3,如果剩下是4,则保留4,然后相乘,但是这个结论需要数学证明其合理性!
代码如下:
class Solution {
public:
int integerBreak(int n) {
if (n == 2) return 1;
if (n == 3) return 2;
if (n == 4) return 4;
int result = 1;
while (n > 4) {
result *= 3;
n -= 3;
}
result *= n;
return result;
}
};
96.不同的二叉搜索树
思路:
- dp[i]的定义为:i个节点有多少种二叉搜索树
- 递归公式:dp[i]等于遍历[1,i],计算分别以j为节点的种数累加
以j为节点的种数又等于以j为节点后,左子树的种数*右子树的种数= dp[j-1]*dp[i-j] - 初始化:0个节点是1种,dp[0] = 1, 其他节点都可以通过dp[0]推出
- 遍历顺序:因为递推公式是从前往后的,所以遍历顺序是从前往后
代码如下:
class Solution {
public:
//dp[i]:i个节点有多少种二叉搜索树
//递推公式:dp[i]等于遍历[1,i],计算分别以j为节点的种数累加
//以j为节点的种数又等于以j为节点后,左子树的种数*右子树的种数= dp[j-1]*dp[i-j]
//初始化:0个节点是1种,dp[0] = 1, 其他节点都可以通过dp[0]推出
int numTrees(int n) {
vector<int> dp(n + 1, 0);
dp[0] = 1;
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= i; j++) {
dp[i] += dp[j - 1] * dp[i - j];
}
}
return dp[n];
}
};
总结
动态规划的dp数组,通常二维的可以优化空间去掉dp[i]维度,但是不太好理解,遍历的时候也需要一些细节上的改动。
明天继续加油!