简介
CanMV IDE 是一款专为 K210 芯片设计的图形识别 Python 软件,它提供了强大的功能,帮助开发者轻松实现基于 K210 芯片的图形识别应用。无论你是初学者还是经验丰富的开发者,CanMV IDE 都能为你提供便捷的开发环境和丰富的资源。
硬件资源
- 主控:CM-1 K210 核心板。RAM: 8MBytes,Flash: 16MBytes。
- 2.8 寸显示屏(分辨率 320 x 240,带电阻触摸)。
- 新标配 GC0328 摄像头(成像效果比原来 OV2640 摄像头要清晰)。
- 1 x LED(蓝灯)。
- 2 x 按键(功能键和复位键)。
- 1 x 无源蜂鸣器。
- 1 x 数字麦克风。
- 1 x MicroSD 卡槽。
- 1 x 麦克风阵列接口。
- 1 x 传感器接口(XH-1.25mm-3P)。
- 1 x UART/I2C 接口(XH-1.25mm-4P)。
- 1 x Type-C(下载/调试/供电)。
- 部分 GPIO 口引出。
开发环境搭建
-
下载 CanMV IDE 软件:点击下载按钮,获取 CanMV IDE 软件的安装包。CanMV IDE的GitHub地址,根据自己的系统下载对应的软件安装包。
-
安装软件:按照安装向导的提示,完成软件的安装。
-
启动 CanMV IDE:安装完成后,双击桌面图标启动软件。
-
连接 K210 模块:使用 Type-C 线将 K210 模块连接到电脑,并确保驱动程序安装正确。
-
烧录出厂固件:K210 模块出厂已经烧录好出厂固件,可以连接 CanMV IDE 来使用 MicroPython 语法编程。不需要每次烧录出厂固件。只有在固件升级或者烧录了其他固件的情况下才需要重新烧录出厂固件。
开发流程
- 创建项目:在 CanMV IDE 中创建一个新的项目,选择合适的模板或从空白项目开始。
- 编写代码:使用 Python 语言编写代码,利用 CanMV IDE 提供的库和函数,实现所需的功能。例如,可以使用图像处理库进行图形识别,使用音频处理库进行语音识别等。
- 调试代码:在编写代码的过程中,可以使用 CanMV IDE 的调试功能,设置断点、查看变量值等,以便及时发现和解决问题。
- 测试功能:编写完代码后,可以在 K210 模块上进行测试,观察程序的运行效果,验证功能是否符合预期。
- 优化代码:根据测试结果,对代码进行优化,提高程序的性能和稳定性。
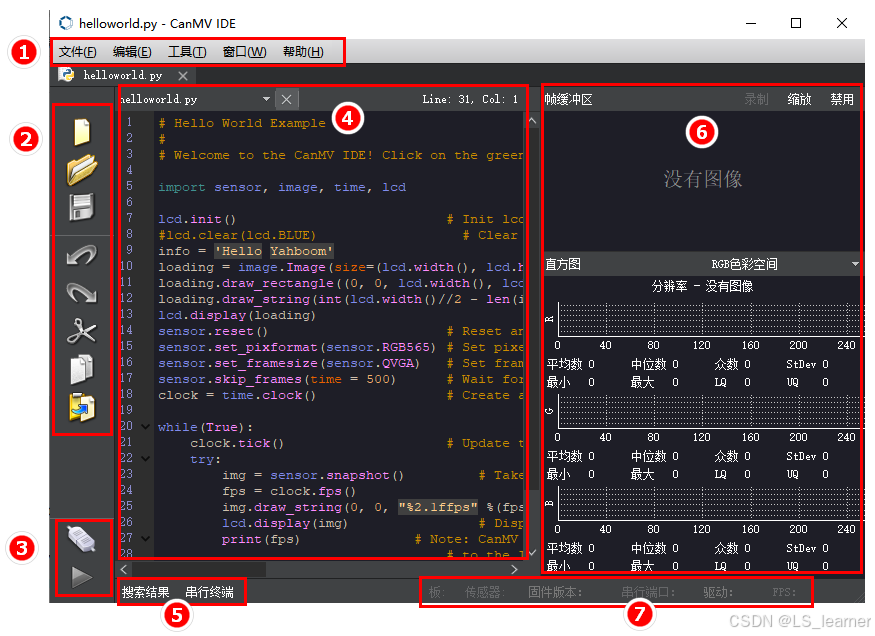
区域①菜单栏:操作文件,使用工具等。
区域②快捷按钮:区域①中的文件和编辑中部分功能的快捷方式。
区域③连接设备:连接设备和程序控制按钮。
区域④代码编辑区:编辑要运行的代码。
区域⑤串行终端:显示串口打印的调试信息。
区域⑥图像预览:显示摄像头的图像预览。
区域⑦固件信息:显示连接的串口号以及固件的相关信息。
注意事项
- 确保开发环境满足 CanMV IDE 的系统要求:在安装和使用 CanMV IDE 之前,确保你的电脑满足软件的系统要求,包括操作系统版本、硬件配置等。
- 参考文档和社区资源:在开发过程中,如遇到问题,可以参考 CanMV IDE 的官方文档、示例代码,或者在社区中寻求帮助。
- 定期更新软件:CanMV IDE 可能会不断更新和优化,建议定期检查并更新软件,以获得更好的开发体验和更多的功能。
通过以上步骤和注意事项,你可以使用 CanMV IDE 开发软件来开发 K210 模块,实现各种图形识别、语音识别等人工智能应用。
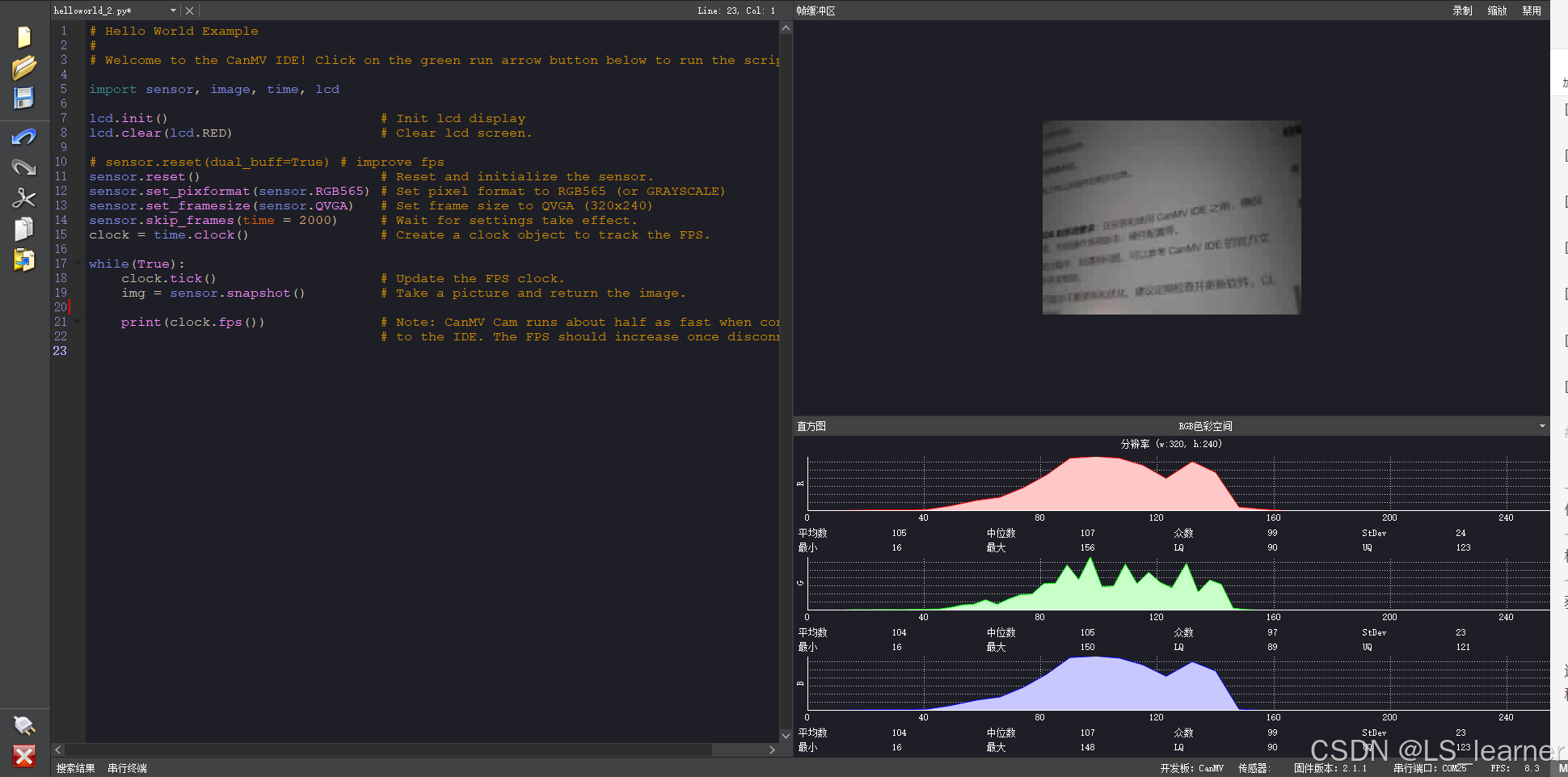
实验结果:
代码:
# Hello World Example
#
# Welcome to the CanMV IDE! Click on the green run arrow button below to run the script!
import sensor, image, time, lcd
lcd.init() # Init lcd display
lcd.clear(lcd.RED) # Clear lcd screen.
# sensor.reset(dual_buff=True) # improve fps
sensor.reset() # Reset and initialize the sensor.
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
sensor.skip_frames(time = 2000) # Wait for settings take effect.
clock = time.clock() # Create a clock object to track the FPS.
while(True):
clock.tick() # Update the FPS clock.
img = sensor.snapshot() # Take a picture and return the image.
print(clock.fps()) # Note: CanMV Cam runs about half as fast when connected
# to the IDE. The FPS should increase once disconnected.