目录
前言
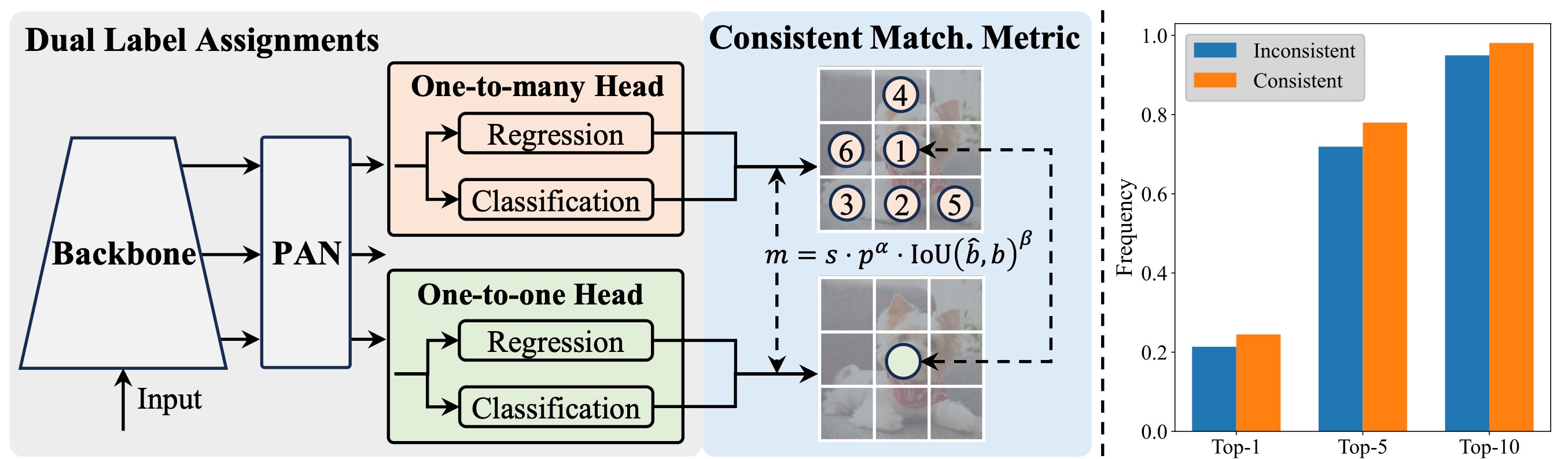
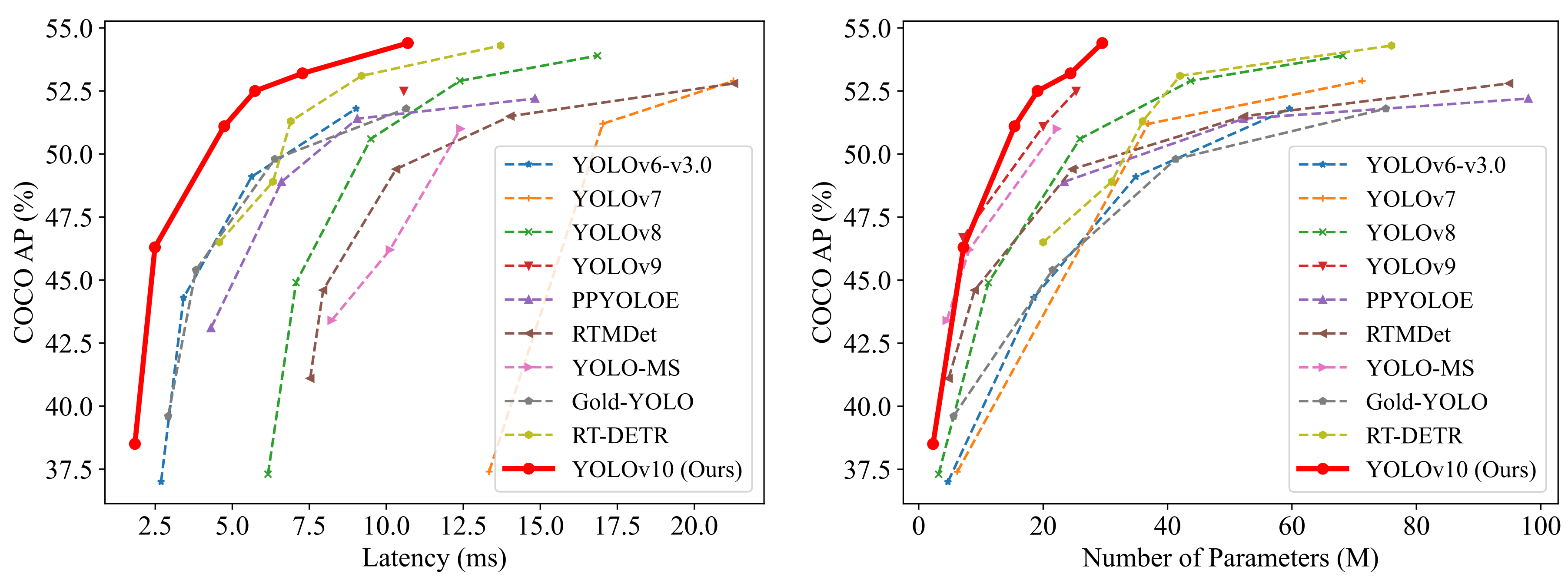
YOLOv10 是由清华大学提出的基于 YOLO 的端到端实时目标检测器,目前已经集成到 ultralytics。本篇文章主要分享博主在实现 YOLOv10 推理和部署时的一些尝试,不涉及任何的原理性分析。若有问题欢迎各位看官批评指正😄
paper:YOLOv10: Real-Time End-to-End Object Detection
Github:https://github.com/THU-MIG/yolov10
一、YOLOv10推理(Python)
1. YOLOv10预测
我们先尝试利用官方预训练权重来推理一张图片并保存,看能否成功
在 YOLOv10 主目录下新建 predict.py 预测文件,其内容如下:
import cv2
from ultralytics import YOLOv10
def hsv2bgr(h, s, v):
h_i = int(h * 6)
f = h * 6 - h_i
p = v * (1 - s)
q = v * (1 - f * s)
t = v * (1 - (1 - f) * s)
r, g, b = 0, 0, 0
if h_i == 0:
r, g, b = v, t, p
elif h_i == 1:
r, g, b = q, v, p
elif h_i == 2:
r, g, b = p, v, t
elif h_i == 3:
r, g, b = p, q, v
elif h_i == 4:
r, g, b = t, p, v
elif h_i == 5:
r, g, b = v, p, q
return int(b * 255), int(g * 255), int(r * 255)
def random_color(id):
h_plane = (((id << 2) ^ 0x937151) % 100) / 100.0
s_plane = (((id << 3) ^ 0x315793) % 100) / 100.0
return hsv2bgr(h_plane, s_plane, 1)
if __name__ == "__main__":
model = YOLOv10("yolov10s.pt")
img = cv2.imread("ultralytics/assets/bus.jpg")
results = model(img)[0]
names = results.names
boxes = results.boxes.data.tolist()
for obj in boxes:
left, top, right, bottom = int(obj[0]), int(obj[1]), int(obj[2]), int(obj[3])
confidence = obj[4]
label = int(obj[5])
color = random_color(label)
cv2.rectangle(img, (left, top), (right, bottom), color=color ,thickness=2, lineType=cv2.LINE_AA)
caption = f"{names[label]} {confidence:.2f}"
w, h = cv2.getTextSize(caption, 0, 1, 2)[0]
cv2.rectangle(img, (left - 3, top - 33), (left + w + 10, top), color, -1)
cv2.putText(img, caption, (left, top - 5), 0, 1, (0, 0, 0), 2, 16)
cv2.imwrite("predict.jpg", img)
print("save done")
在上述代码中我们通过 opencv 读取了一张图像,并送入模型中推理得到输出 results,results 中保存着不同任务的结果,我们这里是检测任务,因此只需要拿到对应的 boxes 即可。
拿到 boxes 后我们就可以将对应的框和模型预测的类别以及置信度绘制在图像上并保存。
关于可视化的代码实现参考自 tensorRT_Pro 中的实现,可以参考:app_yolo.cpp#L95
关于随机颜色的代码实现参考自 tensorRT_Pro 中的实现,可以参考:ilogger.cpp#L90
模型推理保存的结果图像如下所示:
2. YOLOv10预处理
模型预测成功后我们就需要自己动手来写下 YOLOv10 的预处理和后处理,方便后续在 C++ 上的实现,我们先来看看预处理的实现。
经过我们的调试分析可知 YOLOv10 的预处理过程在 yolov10/ultralytics/engine/predictor.py 文件中,可以参考:predictor.py#L115
代码如下:
def preprocess(self, im):
"""
Prepares input image before inference.
Args:
im (torch.Tensor | List(np.ndarray)): BCHW for tensor, [(HWC) x B] for list.
"""
not_tensor = not isinstance(im, torch.Tensor)
if not_tensor:
im = np.stack(self.pre_transform(im))
im = im[..., ::-1].transpose((0, 3, 1, 2)) # BGR to RGB, BHWC to BCHW, (n, 3, h, w)
im = np.ascontiguousarray(im) # contiguous
im = torch.from_numpy(im)
im = im.to(self.device)
im = im.half() if self.model.fp16 else im.float() # uint8 to fp16/32
if not_tensor:
im /= 255 # 0 - 255 to 0.0 - 1.0
return im
它包含以下步骤:
- self.pre_transform:即 letterbox 添加灰条
- im[…,::-1]:BGR → RGB
- transpose((0, 3, 1, 2)):添加 batch 维度,HWC → CHW
- torch.from_numpy:to Tensor
- im /= 255:除以 255,归一化
大家如果对 YOLOv5 的预处理熟悉的话,会发现 YOLOv10 的预处理和 YOLOv5 的预处理一模一样,因此我们不难写出对应的预处理代码,如下所示:
def preprocess_warpAffine(image, dst_width=640, dst_height=640):
scale = min((dst_width / image.shape[1], dst_height / image.shape[0]))
ox = (dst_width - scale * image.shape[1]) / 2
oy = (dst_height - scale * image.shape[0]) / 2
M = np.array([
[scale, 0, ox],
[0, scale, oy]
], dtype=np.float32)
img_pre = cv2.warpAffine(image, M, (dst_width, dst_height), flags=cv2.INTER_LINEAR,
borderMode=cv2.BORDER_CONSTANT, borderValue=(114, 114, 114))
IM = cv2.invertAffineTransform(M)
img_pre = (img_pre[...,::-1] / 255.0).astype(np.float32)
img_pre = img_pre.transpose(2, 0, 1)[None]
img_pre = torch.from_numpy(img_pre)
return img_pre, IM
其中的 letterbox 添加灰条步骤我们可以通过仿射变换 warpAffine 实现,warpAffine 非常适合在 CUDA 上加速,关于 warpAffine 仿射变换的细节大家可以参考 YOLOv5推理详解及预处理高性能实现,这边不再赘述。其它步骤倒是和官方的没有区别。
值得注意的是,letterbox 的操作是先将长边缩放到 640,再将短边按比例缩放,同时确保缩放后的短边能整除 32,如果不能则向上取整多余部分填充。warpAffine 的操作则是将图像分辨率固定在 640x640,多余部分添加灰条,博主对一张 1080x810 分辨率的图像经过两种不同预处理后的结果进行了对比,如下图所示:


可以看到二者明显的差别,letterbox 中没有灰条,因为长边缩放到 640 后短边刚好缩放到 480,能整除 32。而 warpAffine 则是固定分辨率 640x640,因此短边多余部分将用灰条填充。
warpAffine 预处理方法将图像分辨率固定在 640x640,主要有以下几点考虑:(from chatGPT)
- 简化处理逻辑:所有预处理后的图像分辨率相同,可以简化 CUDA 中并行处理的逻辑,使得代码更易于编写和维护。
- 优化内存访问:在 GPU 上,连续的内存访问模式通常比非连续的访问更高效。如果所有图像具有相同的大小和布局,这可以帮助优化内存访问,提高处理速度。
- 避免动态内存分配:动态内存分配和释放是昂贵的操作,特别是在 GPU 上。固定分辨率意味着可以预先分配足够的内存,而不需要根据每个图像的大小动态调整内存大小。
这两种不同的预处理方法生成的图片输入到神经网络时的维度不同,letterbox 的输入是 torch.Size([1, 3, 640, 480]),warpAffine 的输入是 torch.Size([1, 3, 640, 640])。由于输入维度不同将导致模型输出维度的差异,leetrbox 的输出是 torch.Size([1, 84, 6300]) 只有 6300 个框,而 warpAffine 的输出是 torch.Size([1, 84, 8400]) 有 8400 个框,这点大家需要清楚。
3. YOLOv10后处理
我们再来看看后处理的实现
经过我们的调试分析可知 YOLOv8 的后处理过程在 yolov10/ultralytics/models/yolov10/predict.py 文件中,可以参考:yolov10/predict.py#L8
class YOLOv10DetectionPredictor(DetectionPredictor):
def postprocess(self, preds, img, orig_imgs):
if isinstance(preds, dict):
preds = preds["one2one"]
if isinstance(preds, (list, tuple)):
preds = preds[0]
if preds.shape[-1] == 6:
pass
else:
preds = preds.transpose(-1, -2)
bboxes, scores, labels = ops.v10postprocess(preds, self.args.max_det, preds.shape[-1]-4)
bboxes = ops.xywh2xyxy(bboxes)
preds = torch.cat([bboxes, scores.unsqueeze(-1), labels.unsqueeze(-1)], dim=-1)
mask = preds[..., 4] > self.args.conf
b, _, c = preds.shape
preds = preds.view(-1, preds.shape[-1])[mask.view(-1)]
preds = preds.view(b, -1, c)
if not isinstance(orig_imgs, list): # input images are a torch.Tensor, not a list
orig_imgs = ops.convert_torch2numpy_batch(orig_imgs)
results = []
for i, pred in enumerate(preds):
orig_img = orig_imgs[i]
pred[:, :4] = ops.scale_boxes(img.shape[2:], pred[:, :4], orig_img.shape)
img_path = self.batch[0][i]
results.append(Results(orig_img, path=img_path, names=self.model.names, boxes=pred))
return results
它包含以下步骤:
- ops.v10postprocess:框的过滤
- ops.scale_boxes:框的解码,即 decode boxes
后处理部分非常简单,因此我们不难写出对应的后处理代码,如下所示:
def postprocess(pred, IM=[], conf_thres=0.25):
# 输入是模型推理的结果,即8400个预测框
# 1,8400,84 [cx,cy,w,h,class*80]
boxes = []
for item in pred[0]:
cx, cy, w, h = item[:4]
label = item[4:].argmax()
confidence = item[4 + label]
if confidence < conf_thres:
continue
left = cx - w * 0.5
top = cy - h * 0.5
right = cx + w * 0.5
bottom = cy + h * 0.5
boxes.append([left, top, right, bottom, confidence, label])
boxes = np.array(boxes)
lr = boxes[:,[0, 2]]
tb = boxes[:,[1, 3]]
boxes[:,[0,2]] = IM[0][0] * lr + IM[0][2]
boxes[:,[1,3]] = IM[1][1] * tb + IM[1][2]
return boxes
其中预测框的解码我们是通过仿射变换逆矩阵 IM 实现的,关于 IM 的细节大家可以参考 YOLOv5推理详解及预处理高性能实现,这边不再赘述。
值得注意的是我们导出的 ONNX 模型是 end2end 的,没有任何后处理,ONNX 模型中 YOLOv10 预测框的总数量是 300,每个预测框的维度是 6
300
×
6
=
300
×
(
4
+
1
+
1
)
300\times 6 = 300\times (4+1+1)
300×6=300×(4+1+1)
其中的 4 对应的是 left,top,right,bottom,分别代表的含义是边界框的左上角坐标和右下角坐标;后面的 1 代表的是预测类别的置信度;最后的 1 代表的是预测类别的标签
Note:最后的 4 维度不再是边界框的中心点、宽高而是左上角和右下角坐标,在框解码的时候需要注意,不然无法获得正确的结果,这点在 yolov10/issues/7 中有提到,大家感兴趣的可以看下
4. YOLOv10推理
通过上面对 YOLOv10 的预处理和后处理分析之后,整个推理过程就显而易见了。YOLOv10 的推理包括图像预处理、模型推理、预测结果后处理三部分,其中预处理主要包括 warpAffine仿射变换,后处理主要包括框的变换。
完整的推理代码如下:
import cv2
import torch
import numpy as np
from ultralytics.data.augment import LetterBox
from ultralytics.nn.autobackend import AutoBackend
def preprocess_letterbox(image):
letterbox = LetterBox(new_shape=640, stride=32, auto=True)
image = letterbox(image=image)
image = (image[..., ::-1] / 255.0).astype(np.float32) # BGR to RGB, 0 - 255 to 0.0 - 1.0
image = image.transpose(2, 0, 1)[None] # BHWC to BCHW (n, 3, h, w)
image = torch.from_numpy(image)
return image
def preprocess_warpAffine(image, dst_width=640, dst_height=640):
scale = min((dst_width / image.shape[1], dst_height / image.shape[0]))
ox = (dst_width - scale * image.shape[1]) / 2
oy = (dst_height - scale * image.shape[0]) / 2
M = np.array([
[scale, 0, ox],
[0, scale, oy]
], dtype=np.float32)
img_pre = cv2.warpAffine(image, M, (dst_width, dst_height), flags=cv2.INTER_LINEAR,
borderMode=cv2.BORDER_CONSTANT, borderValue=(114, 114, 114))
IM = cv2.invertAffineTransform(M)
img_pre = (img_pre[...,::-1] / 255.0).astype(np.float32)
img_pre = img_pre.transpose(2, 0, 1)[None]
img_pre = torch.from_numpy(img_pre)
return img_pre, IM
def postprocess(pred, IM=[], conf_thres=0.25):
# 输入是模型推理的结果,即8400个预测框
# 1,8400,84 [cx,cy,w,h,class*80]
boxes = []
for item in pred[0]:
cx, cy, w, h = item[:4]
label = item[4:].argmax()
confidence = item[4 + label]
if confidence < conf_thres:
continue
left = cx - w * 0.5
top = cy - h * 0.5
right = cx + w * 0.5
bottom = cy + h * 0.5
boxes.append([left, top, right, bottom, confidence, label])
boxes = np.array(boxes)
lr = boxes[:,[0, 2]]
tb = boxes[:,[1, 3]]
boxes[:,[0,2]] = IM[0][0] * lr + IM[0][2]
boxes[:,[1,3]] = IM[1][1] * tb + IM[1][2]
return boxes
def hsv2bgr(h, s, v):
h_i = int(h * 6)
f = h * 6 - h_i
p = v * (1 - s)
q = v * (1 - f * s)
t = v * (1 - (1 - f) * s)
r, g, b = 0, 0, 0
if h_i == 0:
r, g, b = v, t, p
elif h_i == 1:
r, g, b = q, v, p
elif h_i == 2:
r, g, b = p, v, t
elif h_i == 3:
r, g, b = p, q, v
elif h_i == 4:
r, g, b = t, p, v
elif h_i == 5:
r, g, b = v, p, q
return int(b * 255), int(g * 255), int(r * 255)
def random_color(id):
h_plane = (((id << 2) ^ 0x937151) % 100) / 100.0
s_plane = (((id << 3) ^ 0x315793) % 100) / 100.0
return hsv2bgr(h_plane, s_plane, 1)
if __name__ == "__main__":
img = cv2.imread("ultralytics/assets/bus.jpg")
# img_pre = preprocess_letterbox(img)
img_pre, IM = preprocess_warpAffine(img)
model = AutoBackend(weights="yolov10s.pt")
names = model.names
result = model(img_pre)['one2one'][0].transpose(-1, -2) # 1,8400,84
boxes = postprocess(result, IM)
for obj in boxes:
left, top, right, bottom = int(obj[0]), int(obj[1]), int(obj[2]), int(obj[3])
confidence = obj[4]
label = int(obj[5])
color = random_color(label)
cv2.rectangle(img, (left, top), (right, bottom), color=color ,thickness=2, lineType=cv2.LINE_AA)
caption = f"{names[label]} {confidence:.2f}"
w, h = cv2.getTextSize(caption, 0, 1, 2)[0]
cv2.rectangle(img, (left - 3, top - 33), (left + w + 10, top), color, -1)
cv2.putText(img, caption, (left, top - 5), 0, 1, (0, 0, 0), 2, 16)
cv2.imwrite("infer.jpg", img)
print("save done")
推理效果如下图所示:
至此,我们在 Python 上面完成了 YOLOv10 的整个推理过程,下面我们去 C++ 上实现
二、YOLOv10推理(C++)
C++ 上的实现我们使用的 repo 依旧是 tensorRT_Pro,现在我们就基于 tensorRT_Pro 完成 YOLOv10 在 C++ 上的推理。
1. ONNX导出
首先我们需要将 YOLOv10 模型导出为 ONNX,为了适配 tensorRT_Pro 我们需要做一些修改,主要有以下几点:
- 修改输出节点名为 output
- 输入输出只让 batch 维度动态,宽高不动态
具体修改如下:
在 yolov10-main/ultralytics/engien/exporter.py 文件中改动
- 368 行:输出节点名修改为 output
- 371 行:输入只让 batch 维度动态,宽高不动态
- 376 行:输出只让 batch 维度动态,宽高不动态
# ========== exporter.py ==========
# yolov10-main/ultralytics/engine/exporter.py第323行
# output_names = ['output0', 'output1'] if isinstance(self.model, SegmentationModel) else ['output0']
# dynamic = self.args.dynamic
# if dynamic:
# dynamic = {'images': {0: 'batch', 2: 'height', 3: 'width'}} # shape(1,3,640,640)
# if isinstance(self.model, SegmentationModel):
# dynamic['output0'] = {0: 'batch', 2: 'anchors'} # shape(1, 116, 8400)
# dynamic['output1'] = {0: 'batch', 2: 'mask_height', 3: 'mask_width'} # shape(1,32,160,160)
# elif isinstance(self.model, DetectionModel):
# dynamic['output0'] = {0: 'batch', 2: 'anchors'} # shape(1, 84, 8400)
# 修改为:
output_names = ['output0', 'output1'] if isinstance(self.model, SegmentationModel) else ['output']
dynamic = self.args.dynamic
if dynamic:
dynamic = {'images': {0: 'batch'}} # shape(1,3,640,640)
if isinstance(self.model, SegmentationModel):
dynamic['output0'] = {0: 'batch', 2: 'anchors'} # shape(1, 116, 8400)
dynamic['output1'] = {0: 'batch', 2: 'mask_height', 3: 'mask_width'} # shape(1,32,160,160)
elif isinstance(self.model, DetectionModel):
dynamic['output'] = {0: 'batch'} # shape(1, 84, 8400)
以上就是为了适配 tensorRT_Pro 而做出的代码修改,修改好以后,将预训练权重 yolov10s.pt 放在 yolov10-main 主目录下,新建导出文件 export.py,内容如下:
from ultralytics import YOLO
model = YOLO("yolov10s.pt")
success = model.export(format="onnx", dynamic=True, simplify=True, opset=13)
在终端执行如下指令即可完成 ONNX 导出:
python export.py
导出过程如下图所示:
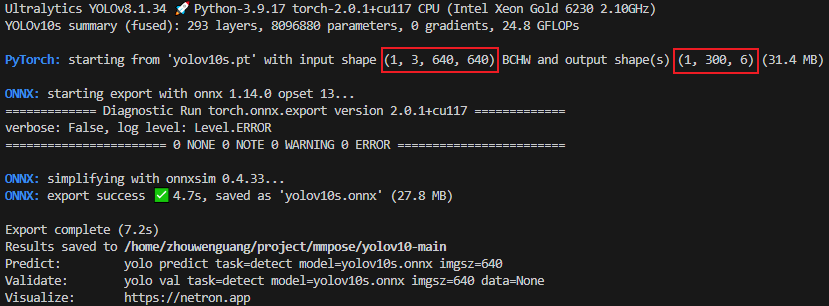
可以看到导出的 pytorch 模型的输入 shape 是 1x3x640x640,输出 shape 是 1x300x6,符合我们的预期。
导出成功后会在当前目录下生成 yolov10s.onnx 模型,我们可以使用 Netron 可视化工具查看,如下图所示:
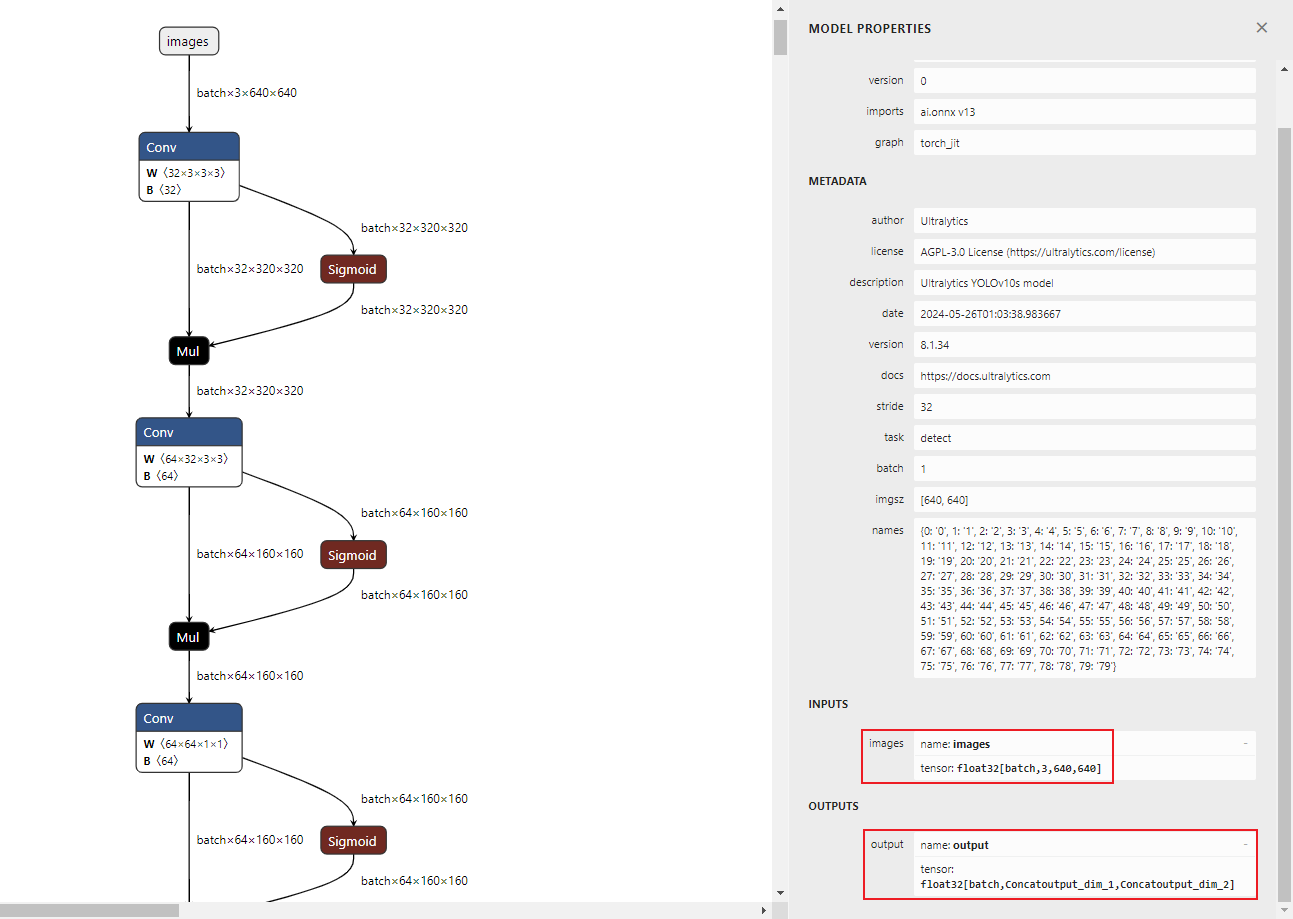
可以看到输入节点名是 images,维度是 batchx3x640x640,保证只有 batch 维度动态,输出节点名是 output,维度是 batchxConcatoutput_dim_1xConcatoutput_dim_2,保证只有 batch 维度动态,符合 tensorRT_Pro 的格式。
大家不要看到 Concatoutput_dim_1 和 Concatoutput_dim_2 就认为这也是动态的,其实输出节点的维度是根据输入节点的维度和模型的结构生成的,而额外的维度 Concatoutput_dim_1 和 Concatoutput_dim_2 可能是由模型结构中某些操作决定的,如拼接(Concat)操作的输出维度,而不是由动态维度决定的。因此,通常情况下,这些维度是静态的,不会在推理时改变。
2. YOLOv10预处理
之前有提到过 YOLOv10 预处理部分和 YOLOv5 实现一模一样,因此我们在 tensorRT_Pro 中 YOLOv8 模型的预处理可以直接使用 YOLOv5 的预处理。
tensorRT_Pro 中预处理的代码如下:
__global__ void warp_affine_bilinear_and_normalize_plane_kernel(uint8_t* src, int src_line_size, int src_width, int src_height, float* dst, int dst_width, int dst_height,
uint8_t const_value_st, float* warp_affine_matrix_2_3, Norm norm, int edge){
int position = blockDim.x * blockIdx.x + threadIdx.x;
if (position >= edge) return;
float m_x1 = warp_affine_matrix_2_3[0];
float m_y1 = warp_affine_matrix_2_3[1];
float m_z1 = warp_affine_matrix_2_3[2];
float m_x2 = warp_affine_matrix_2_3[3];
float m_y2 = warp_affine_matrix_2_3[4];
float m_z2 = warp_affine_matrix_2_3[5];
int dx = position % dst_width;
int dy = position / dst_width;
float src_x = m_x1 * dx + m_y1 * dy + m_z1;
float src_y = m_x2 * dx + m_y2 * dy + m_z2;
float c0, c1, c2;
if(src_x <= -1 || src_x >= src_width || src_y <= -1 || src_y >= src_height){
// out of range
c0 = const_value_st;
c1 = const_value_st;
c2 = const_value_st;
}else{
int y_low = floorf(src_y);
int x_low = floorf(src_x);
int y_high = y_low + 1;
int x_high = x_low + 1;
uint8_t const_value[] = {const_value_st, const_value_st, const_value_st};
float ly = src_y - y_low;
float lx = src_x - x_low;
float hy = 1 - ly;
float hx = 1 - lx;
float w1 = hy * hx, w2 = hy * lx, w3 = ly * hx, w4 = ly * lx;
uint8_t* v1 = const_value;
uint8_t* v2 = const_value;
uint8_t* v3 = const_value;
uint8_t* v4 = const_value;
if(y_low >= 0){
if (x_low >= 0)
v1 = src + y_low * src_line_size + x_low * 3;
if (x_high < src_width)
v2 = src + y_low * src_line_size + x_high * 3;
}
if(y_high < src_height){
if (x_low >= 0)
v3 = src + y_high * src_line_size + x_low * 3;
if (x_high < src_width)
v4 = src + y_high * src_line_size + x_high * 3;
}
// same to opencv
c0 = floorf(w1 * v1[0] + w2 * v2[0] + w3 * v3[0] + w4 * v4[0] + 0.5f);
c1 = floorf(w1 * v1[1] + w2 * v2[1] + w3 * v3[1] + w4 * v4[1] + 0.5f);
c2 = floorf(w1 * v1[2] + w2 * v2[2] + w3 * v3[2] + w4 * v4[2] + 0.5f);
}
if(norm.channel_type == ChannelType::Invert){
float t = c2;
c2 = c0; c0 = t;
}
if(norm.type == NormType::MeanStd){
c0 = (c0 * norm.alpha - norm.mean[0]) / norm.std[0];
c1 = (c1 * norm.alpha - norm.mean[1]) / norm.std[1];
c2 = (c2 * norm.alpha - norm.mean[2]) / norm.std[2];
}else if(norm.type == NormType::AlphaBeta){
c0 = c0 * norm.alpha + norm.beta;
c1 = c1 * norm.alpha + norm.beta;
c2 = c2 * norm.alpha + norm.beta;
}
int area = dst_width * dst_height;
float* pdst_c0 = dst + dy * dst_width + dx;
float* pdst_c1 = pdst_c0 + area;
float* pdst_c2 = pdst_c1 + area;
*pdst_c0 = c0;
*pdst_c1 = c1;
*pdst_c2 = c2;
}
关于预处理部分其实就是调用了上述 CUDA 核函数来实现 warpAffine,由于在 CUDA 中我们是对每个像素进行操作,因此非常容易实现 BGR → RGB,/255.0 等操作。关于代码的具体分析可以参考 YOLOv5推理详解及预处理高性能实现,这边不再赘述。
3. YOLOv10后处理
之前有提到 YOLOv10 是基于端到端的检测器,是没有后处理的,不过我们还是需要将框进行 decode 解码,代码可参考:yolo_decode.cu#L13
因此我们不难写出 YOLOv10 的 decode 解码部分的实现代码,如下所示:
static __global__ void decode_kernel_v10(float *predict, int num_bboxes, float confidence_threshold, float* invert_affine_matrix, float* parray, int MAX_IMAGE_BOXES){
int position = blockDim.x * blockIdx.x + threadIdx.x;
if(position >= num_bboxes) return;
float* pitem = predict + NUM_BOX_ELEMENT_v10 * position;
float confidence = *(pitem + 4);
float label = *(pitem + 5);
if(confidence < confidence_threshold)
return;
int index = atomicAdd(parray, 1);
if(index >= MAX_IMAGE_BOXES)
return;
float left = *pitem++;
float top = *pitem++;
float right = *pitem++;
float bottom = *pitem++;
affine_project(invert_affine_matrix, left, top, &left, &top);
affine_project(invert_affine_matrix, right, bottom, &right, &bottom);
float* pout_item = parray + 1 + index * NUM_BOX_ELEMENT_v10;
*pout_item++ = left;
*pout_item++ = top;
*pout_item++ = right;
*pout_item++ = bottom;
*pout_item++ = confidence;
*pout_item++ = label;
}
关于 decode 的具体实现其实就是启动多个线程,每个线程处理一个框的解码,由于解码出来的框坐标是在 640x640 的图像上,因此可视化时还需要将其映射到原图上。
4. YOLOv10推理
通过上面对 YOLOv10 的预处理和后处理分析之后,整个推理过程就显而易见了。C++ 上 YOLOv10 的预处理部分可直接沿用 YOLOv5 的预处理,后处理中的 decode 解码部分简单修改即可。
首先我们需要利用 tensorRT_Pro 的编译接口 TRT::compile 来将 RT-DETR 的 ONNX 模型生成对应版本的 engine,编译图解如下所示:
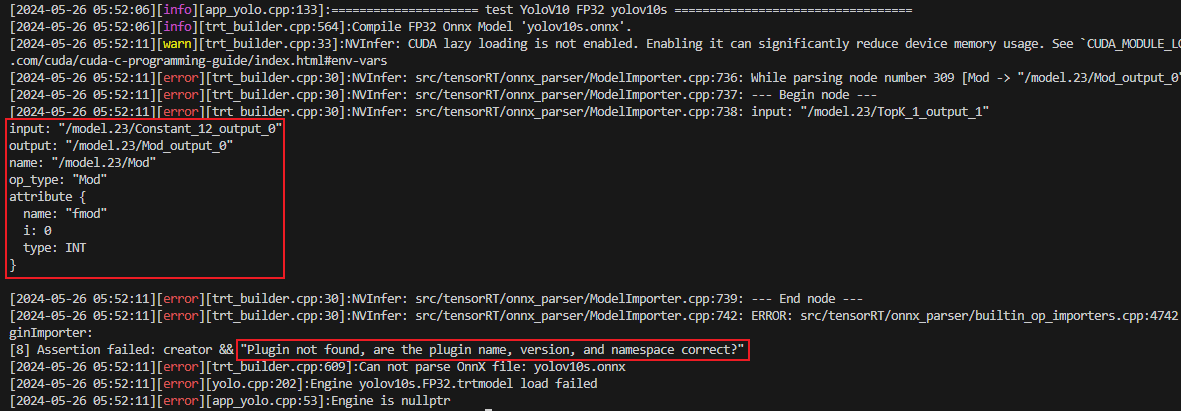
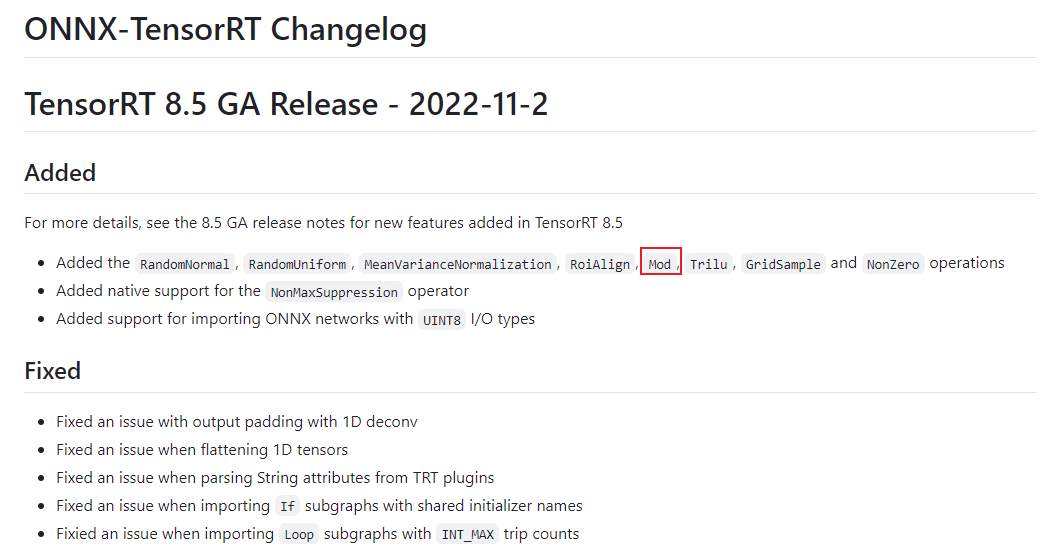
可以看到又遇到了之前节点解析的问题,这次无法解析的节点名是 Mod 节点,我们先去 onnx-tensorrt 官网看看 Mod 算子的支持情况,经过博主查看文档发现在 TensorRT-8.5 版本之后才开始支持 Mod 节点,具体可以查看 onnx-tensorrt/blob/release/8.5-GA/docs/Changelog.md
由于 tensorRT_Pro 中的 onnx-parser 解析器是 8.0 版本的所以不支持 Mod 节点的解析,当然我们可以自己写插件支持,但既然高版本的 TensorRT 支持 Mod 节点我们就没必要自己写插件了。
我们目前无法通过 TRT::compile 编译接口生成 engine,摆在我们面前的依旧是两种方案,一种是手动替换 onnx-parser 解析器,这点我们在 RT-DETR推理详解及部署实现 有详细讲过;另一种就是利用高版本的 tensorRT 的 trtexec 工具生成 engine
我们先来看第二种方案,利用高版本的 trtexec 工具生成 engine
博主新建了一个 build.sh 脚本文件,其内容如下:
#! /usr/bin/bash
TRTEXEC=/home/zhouwenguang/lean/TensorRT-8.6.1.6/bin/trtexec
# export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/home/zhouwenguang/lean/TensorRT-8.6.1.6/lib
${TRTEXEC} --onnx=yolov10s.onnx --minShapes=images:1x3x640x640 --optShapes=images:1x3x640x640 --maxShapes=images:16x3x640x640 --saveEngine=yolov10s.FP32.trtmodel
在终端执行如下指令即可:
bash build.sh
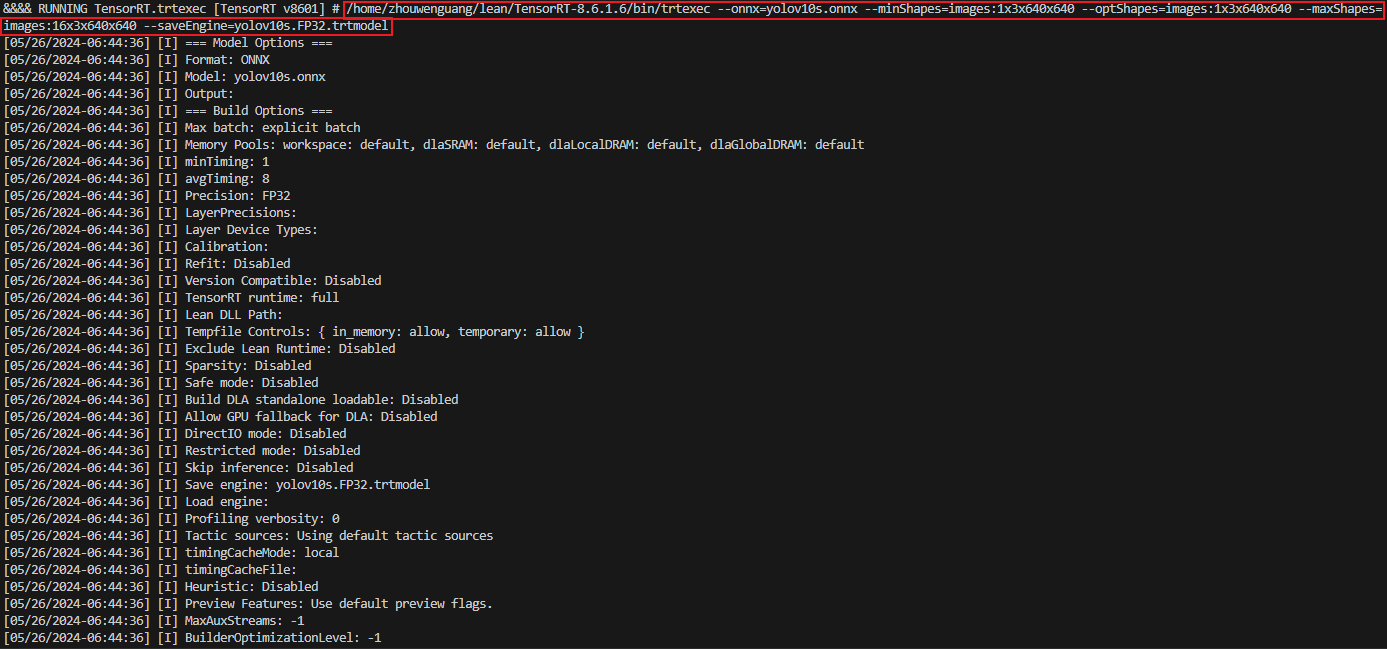
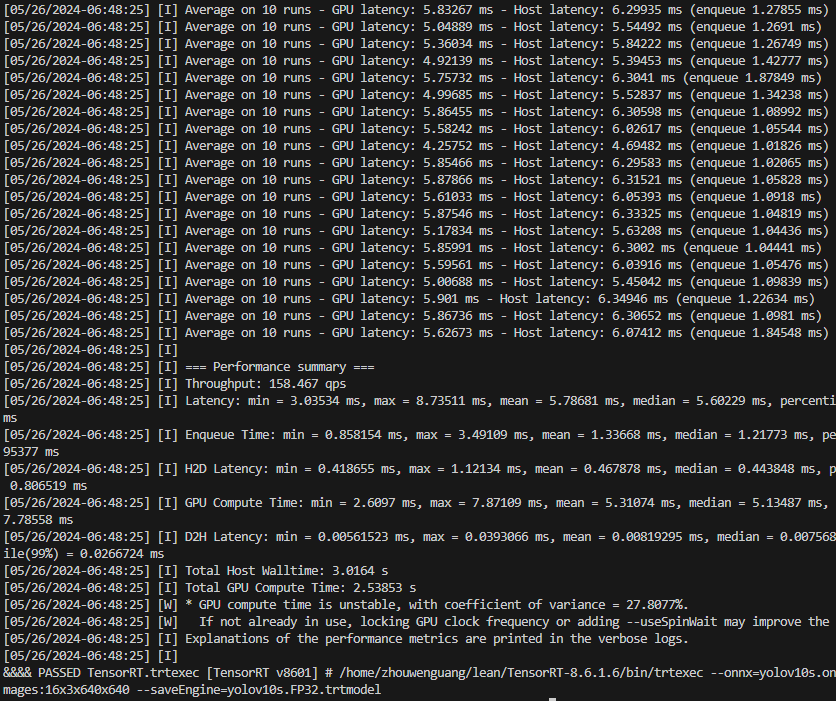
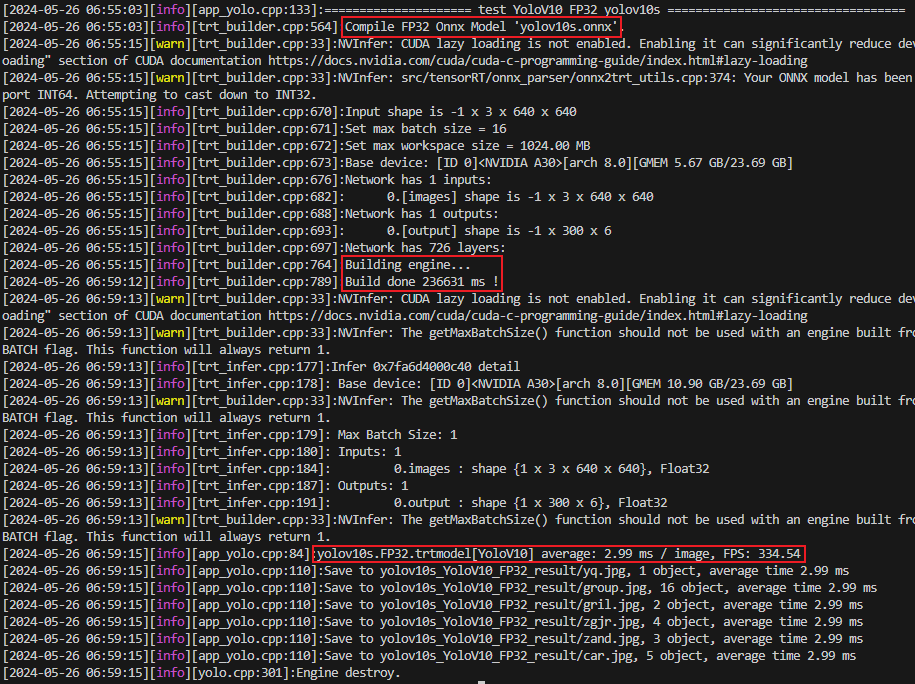
可以看到 engine 生成成功了,接下来就是拿着 engine 去进行推理了
我们在终端执行如下指令即可完成推理(注意!完整流程博主会在后续内容介绍,这边只是简单演示)
make yolo -j64
输出如下:
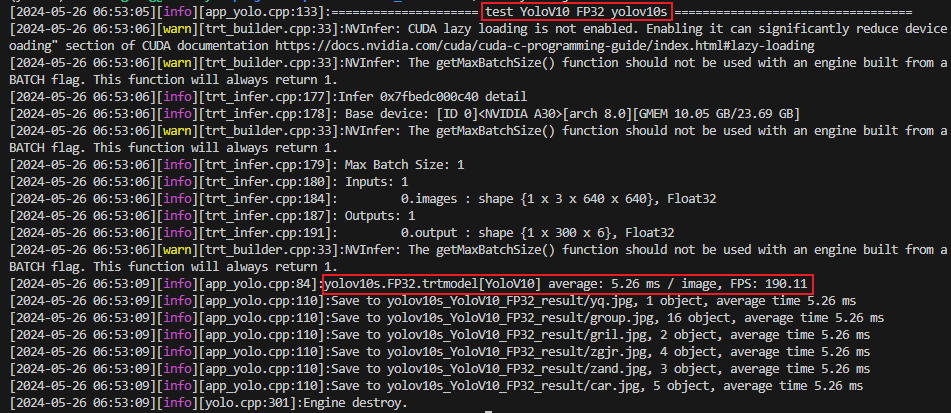
推理结果如下图所示:
PS:方案一手动替换 onnx-parser 我们在 RT-DETR推理详解及部署实现 有详细讲过,这边就不再赘述了
采用方案一替换 onnx-parser 之后我们就可以通过 TRT::compile 来构建 engine 了,输出如下图所示:
至此,我们在 C++ 上面完成了 YOLOv10 的整个推理过程,下面我们将完整的走一遍流程。
三、YOLOv10部署
博主新建了一个仓库 tensorRT_Pro-YOLOv8,该仓库基于 shouxieai/tensorRT_Pro,并进行了调整以支持 YOLOv8 的各项任务,目前已支持分类、检测、分割、姿态点估计任务。
下面我们就来具体看看如何利用 tensorRT_Pro-YOLOv8 这个 repo 完成 YOLOv10 的推理。
1. 源码下载
tensorRT_Pro-YOLOv8 的代码可以直接从 GitHub 官网上下载,源码下载地址是 https://github.com/Melody-Zhou/tensorRT_Pro-YOLOv8,Linux 下代码克隆指令如下:
git clone https://github.com/Melody-Zhou/tensorRT_Pro-YOLOv8.git
也可手动点击下载,点击右上角的 Code 按键,将代码下载下来。至此整个项目就已经准备好了。也可以点击 here 下载博主准备好的源代码(注意代码下载于 2024/5/26 日,若有改动请参考最新)
2. 环境配置
需要使用的软件环境有 TensorRT、CUDA、cuDNN、OpenCV、Protobuf,所有软件环境的安装可以参考 Ubuntu20.04软件安装大全,这里不再赘述,需要各位看官自行配置好相关环境😄,外网访问较慢,这里提供下博主安装过程中的软件安装包下载链接 Baidu Drive【pwd:yolo】🚀🚀🚀
tensorRT_Pro-YOLOv8 提供 CMakeLists.txt 和 Makefile 两种方式编译,二者选一即可
2.1 配置CMakeLists.txt
主要修改五处
1. 修改第 13 行,修改 OpenCV 路径
set(OpenCV_DIR "/usr/local/include/opencv4/")
2. 修改第 15 行,修改 CUDA 路径
set(CUDA_TOOLKIT_ROOT_DIR "/usr/local/cuda-11.6")
3. 修改第 16 行,修改 cuDNN 路径
set(CUDNN_DIR "/usr/local/cudnn8.4.0.27-cuda11.6")
4. 修改第 17 行,修改 tensorRT 路径(版本必须大于 8.5)
set(TENSORRT_DIR "/home/jarvis/lean/TensorRT-8.6.1.6")
5. 修改第 20 行,修改 protobuf 路径
set(PROTOBUF_DIR "/home/jarvis/protobuf")
2.2 配置Makefile
主要修改五处
1. 修改第 4 行,修改 protobuf 路径
lean_protobuf := /home/jarvis/protobuf
2. 修改第 5 行,修改 tensorRT 路径(版本必须大于 8.5)
lean_tensor_rt := /home/jarvis/lean/TensorRT-8.6.1.6
3. 修改第 6 行,修改 cuDNN 路径
lean_cudnn := /usr/local/cudnn8.4.0.27-cuda11.6
4. 修改第 7 行,修改 OpenCV 路径
lean_opencv := /usr/local
5. 修改第 8 行,修改 CUDA 路径
lean_cuda := /usr/local/cuda-11.6
3. ONNX导出
导出细节可以查看之前的内容,这边不再赘述。记得将导出的 ONNX 模型放在 tensorRT_Pro-YOLOv8/workspace 文件夹下。
4. engine生成
修改 workspace 下 build.sh 文件内容,如下所示:
#! /usr/bin/bash
TRTEXEC=/home/zhouwenguang/lean/TensorRT-8.6.1.6/bin/trtexec
# export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/home/zhouwenguang/lean/TensorRT-8.6.1.6/lib
${TRTEXEC} --onnx=yolov10s.onnx --minShapes=images:1x3x640x640 --optShapes=images:1x3x640x640 --maxShapes=images:16x3x640x640 --saveEngine=yolov10s.FP32.trtmodel
其中需要修改 TRTEXEC 的路径为你自己的路径,终端执行如下指令:
cd tensorRT_Pro-YOLOv8/workspace
bash build.sh
5. 源码修改
如果你想推理自己训练的模型还需要修改下源代码,YOLOv10 模型的推理代码主要在 app_yolo.cpp 文件中,我们就只需要修改这一个文件中的内容即可,源码修改较简单主要有以下几点:
- 1. app_yolo.cpp 277行,注释
- 2. app_yolo.cpp 286行,取消注释,“yolov10s” 修改为你导出的 ONNX 模型名
- 3. app_yolo.cpp 11行, 将 cocolabels 数组中的类别名称修改为你训练的类别
// test(Yolo::Type::V8, TRT::Mode::FP32, "yolov8s") // 修改1 277行注释
test(Yolo::Type::V10, TRT::Mode::FP32, "best") // 修改2 286行取消注释,"yolov10s"改成"best"
static const char *cocolabels[] = {"have_mask", "no_mask"}; // 修改2 11行修改检测类别,为自训练模型的类别名称
6. 运行
OK!源码修改好了,Makefile 编译文件也搞定了,engine 模型也准备好了,现在可以编译运行了,直接在终端执行如下指令即可:
make yolo -j64
推理过程如下图所示:
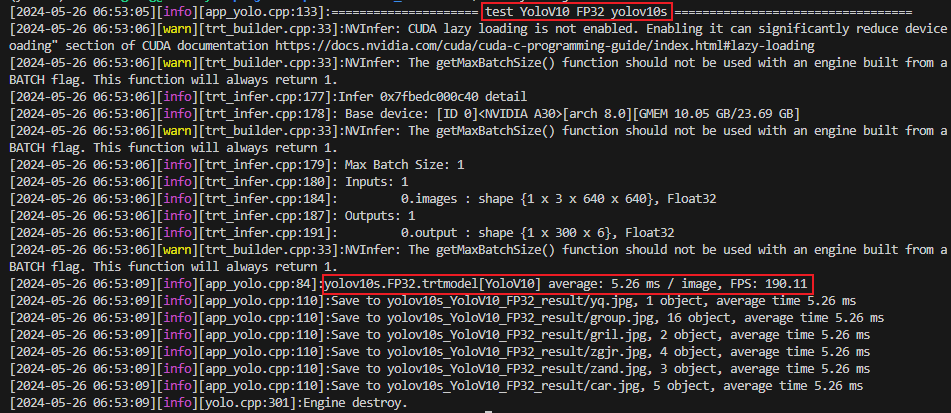
推理成功后会生成 yolov10s_YoloV10_FP32_result 文件夹,该文件夹下保存了推理的图片。
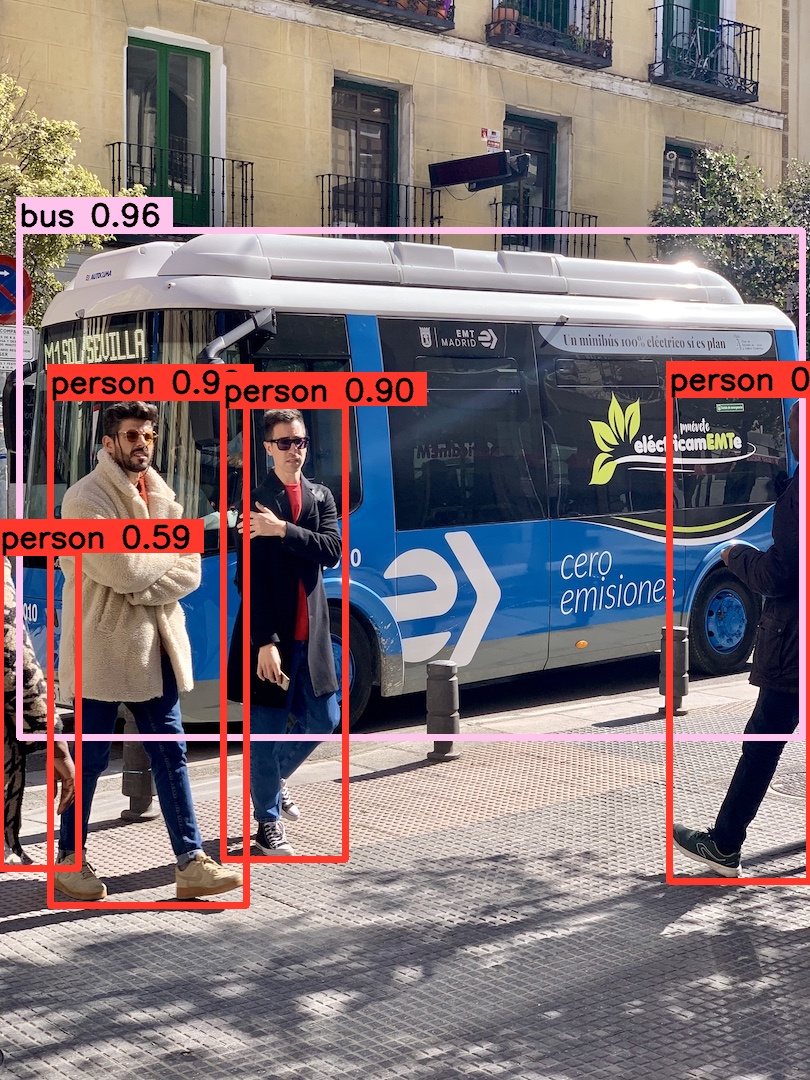
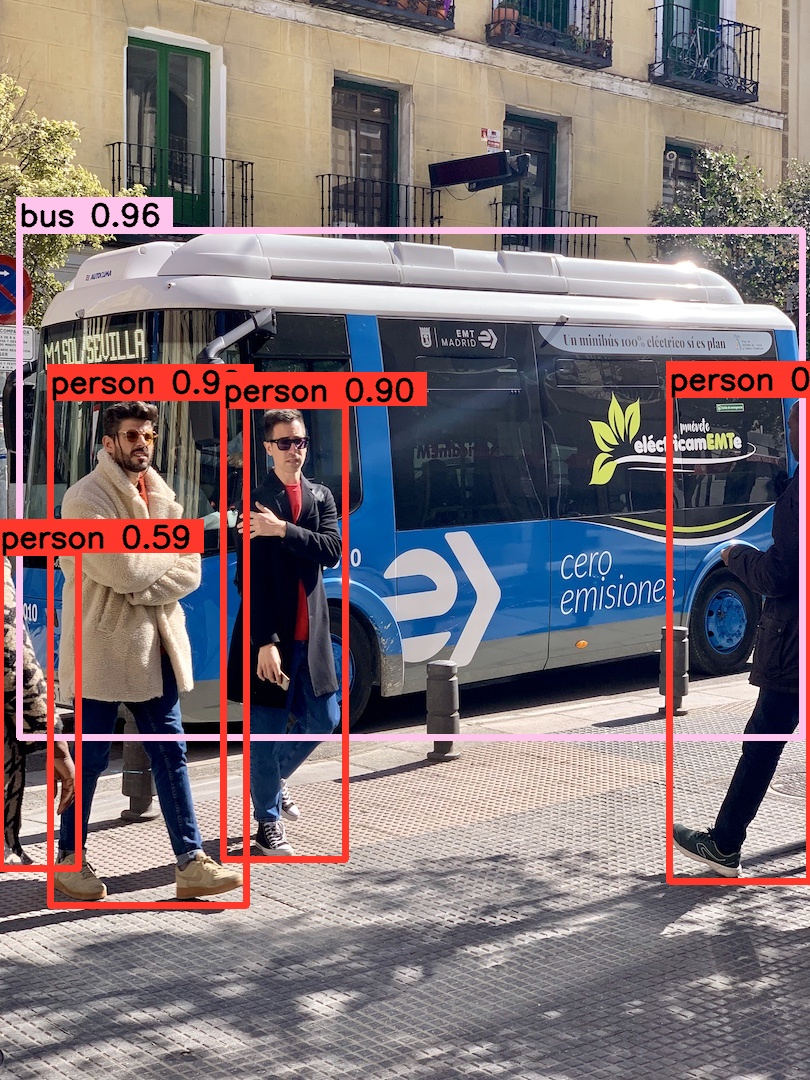
模型推理效果如下图所示:
OK!以上就是使用 tensorRT_Pro-YOLOv8 推理 YOLOv10 的大致流程,若有问题,欢迎各位看官批评指正。
结语
博主在这里针对 YOLOv10 的预处理和后处理做了简单分析,同时与大家分享了 C++ 上的实现流程,目的是帮大家理清思路,更好的完成后续的部署工作😄。YOLOv10 是一个端到端的检测器,预处理没啥变化,后处理没有,只是需要大家注意模型输出的结果中 4 代表的是框的左上角和右下角坐标。感谢各位看到最后,创作不易,读后有收获的看官请帮忙点个👍⭐️
最后大家如果觉得 tensorRT_Pro-YOLOv8 这个 repo 对你有帮助的话,不妨点个 ⭐️ 支持一波,这对博主来说非常重要,感谢各位🙏。