
import cv2
import numpy as np
# 读取图像,这里添加了判断图像是否读取成功的逻辑
img = cv2.imread("./640.png")
# 灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 高斯模糊
gray = cv2.GaussianBlur(gray, (5, 5), 0)
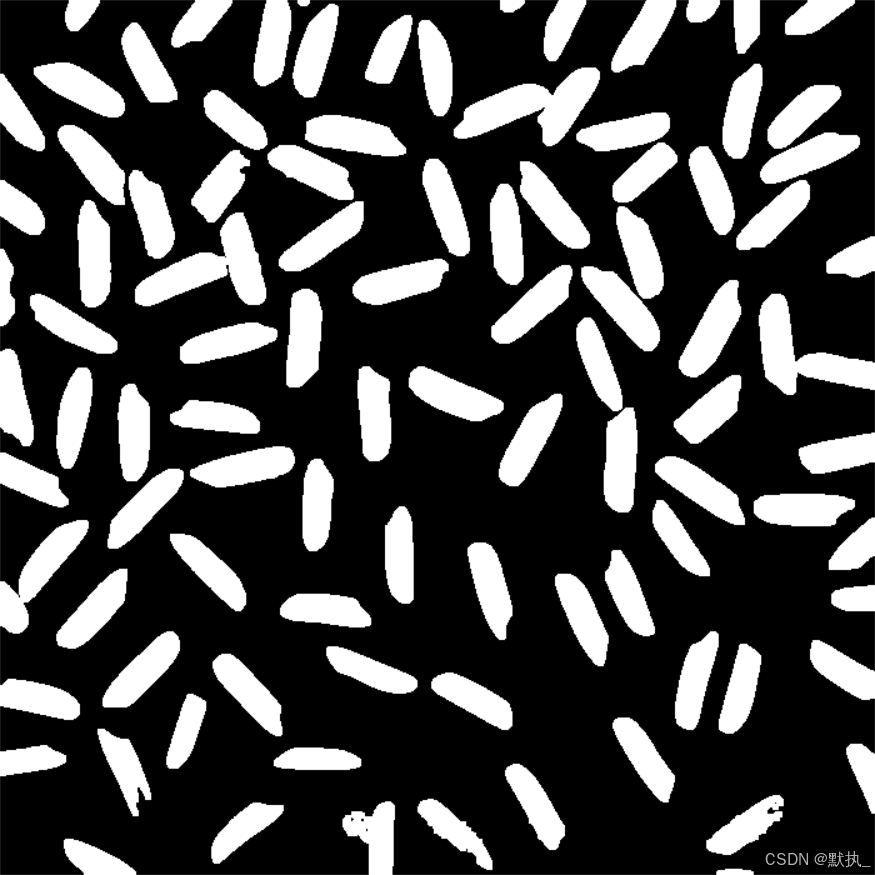
# 二值化
ret, binary = cv2.threshold(gray, 115, 255, cv2.THRESH_BINARY)
kernel = np.ones((5, 5), np.uint8)
# 开运算
binary = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel, iterations=1)
cv2.imshow('thres', binary)
cv2.waitKey(0)
cv2.destroyAllWindows()
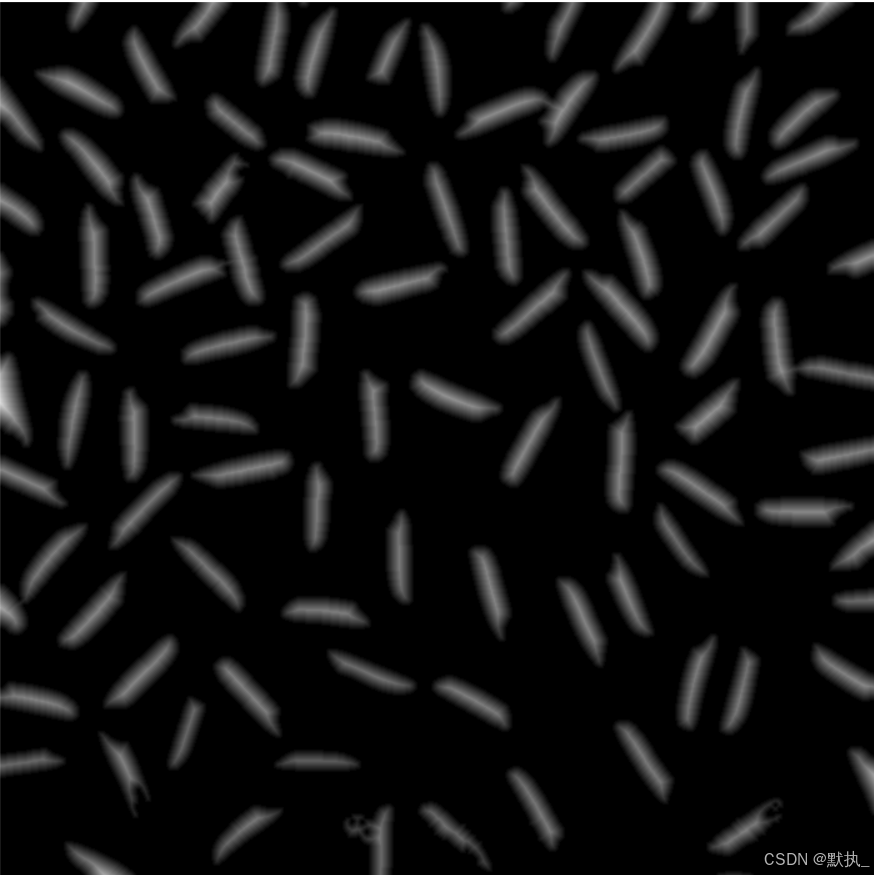
# 距离变换
dist = cv2.distanceTransform(binary, cv2.DIST_L2, 3)
# 对二值图像进行距离变换操作,使用cv2.distanceTransform函数,计算图像中每个非零像素到最近的零像素的距离,
# 参数cv2.DIST_L2表示使用欧几里得距离(也可以选择其他距离度量方式),参数3表示距离变换的掩码大小,
# 得到的dist结果是一个单通道图像,其像素值表示对应的距离信息,该操作常用于图像分割等场景中,帮助区分不同区域的边界等。
dist_out = cv2.normalize(dist, 0, 1.0, cv2.NORM_MINMAX)
# 对距离变换得到的图像进行归一化处理,使用cv2.normalize函数,将像素值归一化到0到1.0的范围,
# 方便后续基于归一化后的距离值进行阈值处理等操作,采用cv2.NORM_MINMAX归一化类型,表示将最小值映射到0,最大值映射到1.0。
cv2.imshow('distance-Transform', dist_out*100)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 显示归一化后的距离变换图像,为了更直观地查看距离信息,将归一化后的图像像素值乘以100进行放大显示(只是为了视觉效果更好,
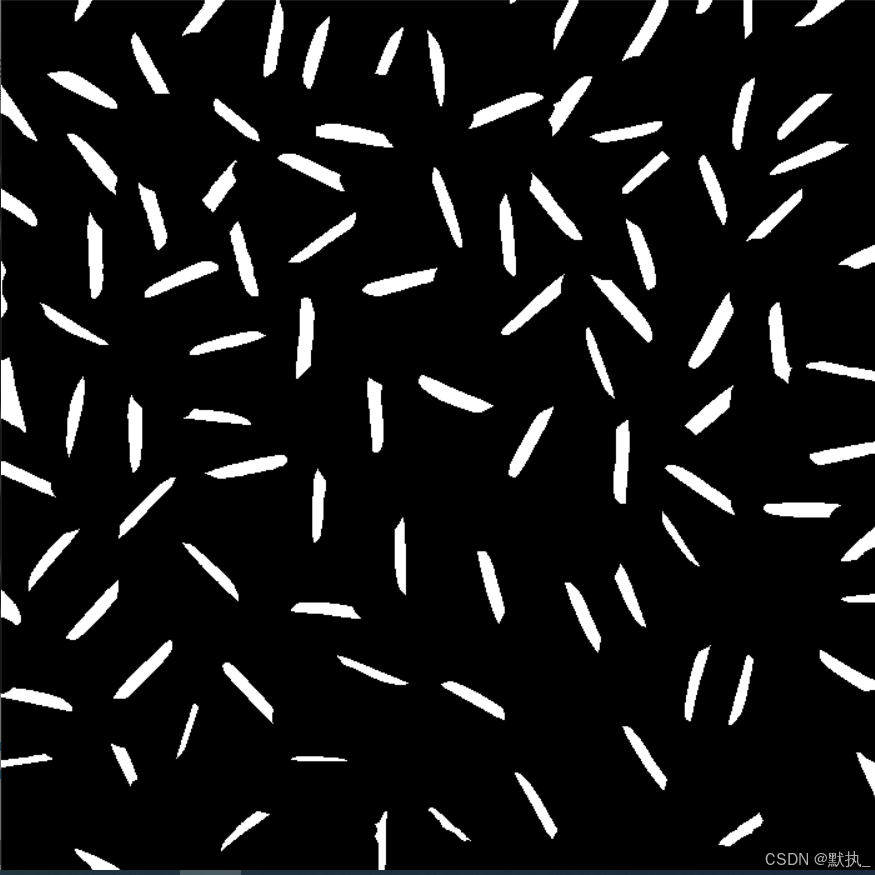
ret, surface = cv2.threshold(dist_out, (0.35 * dist_out.max()), 255, cv2.THRESH_BINARY)
# 对归一化后的距离变换图像进行阈值处理,确定图像中的前景区域,这里使用cv2.threshold函数,
# 注意阈值参数的计算,先通过(0.35 * dist_out.max())计算出具体的阈值数值(原代码此处计算方式有误,需先算出具体值再传入函数),
# 大于该阈值的像素设置为255(白色),表示属于前景区域,小于等于该阈值的像素设置为0(黑色),处理后的图像surface表示初步确定的前景区域。
print(surface)
cv2.imshow('123', surface)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 乘回来、转格式、
img_1 = (surface*255).astype(np.uint8)
# 轮廓查询
# print(cv2.RETR_LIST, cv2.RETR_EXTERNAL, cv2.RETR_CCOMP, cv2.RETR_TREE)
contours, hierarchy = cv2.findContours(img_1, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
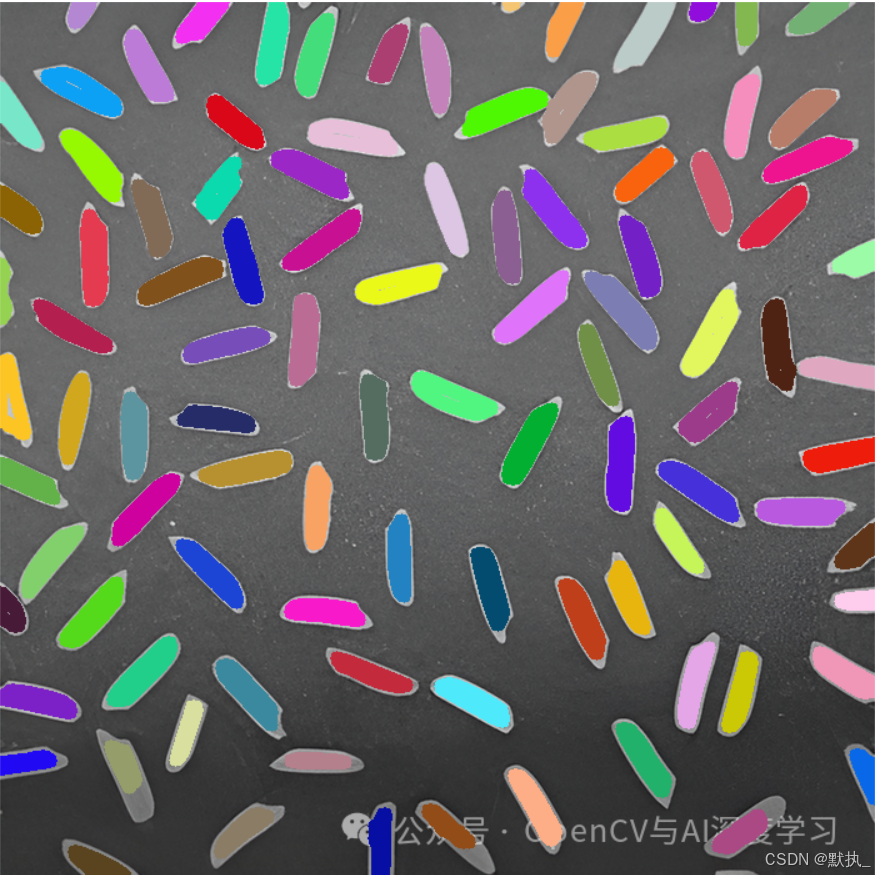
for cnt in contours:
# 精准绘制轮廓
cv2.drawContours(img, [cnt], -1, (0, 255, 0), 1)
cv2.imshow('1', img)
cv2.waitKey(0)