前言
最近学习了一点点C++知识,想巩固一下之前的知识。
一、开发环境
1.1 软件
- Pycharm
- Visual Studio 2019
- QT 5.12
- Opencv 4.6.0
1.2 Python所需库
- Pytorch
- torchvision
二、VS 2019 环境的配置
2.1 VS 2019 配置opencv 4.6.0
见《VS2019中配置OpenCv4.5.5,保姆级教程》.
2.2 VS 2019配置QT 5.12
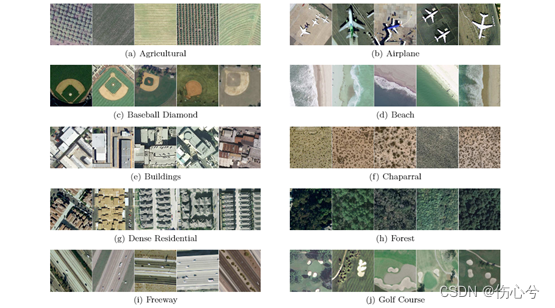
三、数据集的介绍
- 参考博客:遥感场景识别数据集(场景分类).
-
UC Merced 场景识别数据集
- 2010年10月,加利福尼亚加州大学默塞德分校计算机视觉实验室发布UC Merced数据集。
-
数据来源
- 数据集影像来源于美国国家地质调查局(USGS)国家地图城市地区影像集合(National Map Urban Area Imagery)中的大影像的手动提取,图像用于全国各地的城市地区。
-
数据集介绍
- 数据类别:共21类,包含农业区域、飞机、棒球场、海滩、建筑群、丛林、密集住宅、森林、高速公路、高尔夫球场、港口、交叉路口、中心住宅、移动住房公园、立交桥、停车场、河流、跑道、稀疏住宅、储油罐和网球场。
-
图像尺寸
- 256×256像元。
-
像素分辨率
- 1英尺。
-
数据集规模
- 每类100张影像样本,共2100张影像。
-
下载地址
四、设计原理
设计流程如下:
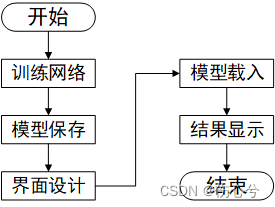
- 训练网络:卷积网络的使用的是何凯明大神团队的的ResNet,框架使用的是FaceBook的Pytorch。
- 模型保存为便于部署的ONNX(开放神经网络交换格式,Open Neural Network Exchange)模型。
- 界面设计使用的QT。
- 模型载入使用的是Opencv中的DNN模块。
五、结果展示

六、核心代码
6.1 模型保存为ONNX文件
# 导出网络到ONNX
dummy_input = torch.randn(1, 3, 256, 256).to(device)
torch.onnx.export(net, dummy_input, "torch.onnx")
6.2 打开图片所在文件夹并获得路径
QString OpenFile, OpenFilePath;
QImage image;
//打开文件夹中的图片文件
OpenFile = QFileDialog::getOpenFileName(this,
"Please choose an image file",
"./val",
"Image Files(*.jpg *.png *.tif *.pgm *.pbm);;All(*.*)");
if (OpenFile != "")
{
if (image.load(OpenFile))
{
ui.label->setPixmap(QPixmap::fromImage(image));
}
}
//显示所示图片的路径
QFileInfo OpenFileInfo;
OpenFileInfo = QFileInfo(OpenFile);
OpenFilePath = OpenFileInfo.filePath();//图片所在路径
ui.lineEdit_1->setText(OpenFilePath.split("/")[8]);//获得图片名称
6.3 模型的载入与图片初始化
String modelFile = "./torch.onnx";
String imageFile = OpenFilePath.toStdString();
dnn::Net net = cv::dnn::readNetFromONNX(modelFile); //读取网络和参数
Mat image1 = imread(imageFile); // 读取测试图片
cv::cvtColor(image1, image1, cv::COLOR_BGR2RGB);
Mat inputBolb = blobFromImage(image1, 0.00390625f, Size(256, 256), Scalar(), false, false); //将图像转化为正确输入格式
net.setInput(inputBolb); //输入图像
Mat result = net.forward().reshape(1, 1); //前向计算
6.4 标签的定义与结果的获取
map<int, string> dict{
{0 , "agricultural"},
{1 , "airplane"},
{2 , "baseballdiamond"},
{3 , "beach"},
{4 , "buildings"},
{5 , "chaparral"},
{6 , "denseresidential"},
{7 , "forest"},
{8 , "freeway"},
{9 , "golfcourse"},
{10 , "harbor"},
{11 , "intersection"},
{12 , "mediumresidential"},
{13 , "mobilehomepark"},
{14 , "overpass"},
{15 , "parkinglot"},
{16 , "river"},
{17 , "runway"},
{18 , "sparseresidential"},
{19 , "storagetanks"},
{20 , "tenniscourt"} }; // 定义一个 map 类型数据 相当于Python中的字典
double minValue, maxValue; // 最大值,最小值
Point minIdx, maxIdx; // 最小值坐标,最大值坐标
minMaxLoc(result, &minValue, &maxValue, &minIdx, &maxIdx);
QString QS = QString::fromStdString(dict[maxIdx.x]);//将cv::String转为QString
ui.lineEdit->setText(QS);
七、总结与不足
- 初步将VS 2019、Opencv、QT和深度学习联系在一起,对遥感图像进行分类。
- 在VS 2019进行分类时,发现准确率并没有达到训练时准确率。怀疑是图像问题,遂上网查了查.tif图片文件共有24个通道,这波是大意了。因为只是做一个例子玩玩。今后可能会查阅相关知识进行修改测试。