图
前言
图的力扣什么的也刷了也不少了,但是刷的时候吧老是觉得想法比较杂乱,不成章法,对此我痛定思痛,觉得是时候花时间来系统的捋一捋关于图的一些内容,文章估计比较长,如果你是初学的朋友估计会有点吃力,不过加油肯定能学会的.
图论数据结构
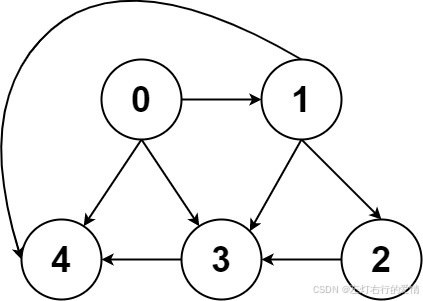
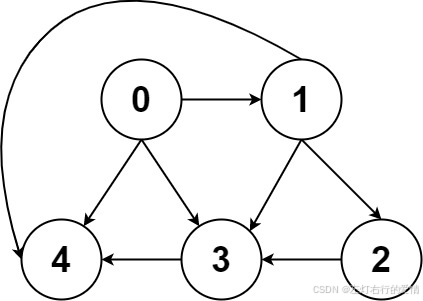
对于图的逻辑结构是很简单的,如下
可以看到是由节点(Vertex)+边(Edge)构成.
它的代码实现也很简单,你可以参考着多叉树来看:
// 图节点的逻辑结构
class Vertex {
int id;
Vertex[] neighbors;
}
// 基本的 N 叉树节点
class TreeNode {
int val;
TreeNode[] children;
}
树的DFS/BFS遍历都适用于图.
但是图比树多了一个概念-- 度(degree).
度是每个节点相连边的条数.
每个节点的度被细分为入度(indegree)与出度(outdegree).
上图的节点 3 的入度为 3(有三条边指向它),出度为 1(它有 1 条边指向别的节点)。
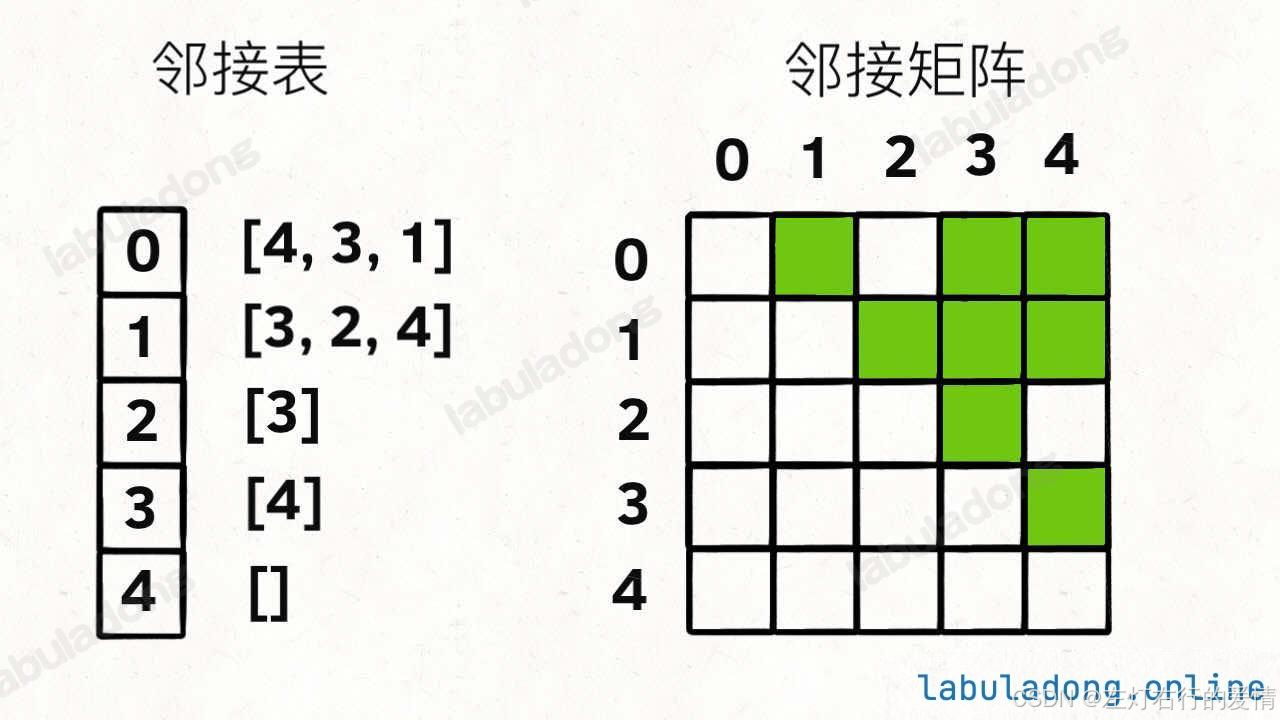
上面图结构是逻辑上这样实现,但是我们很少会用Vertex类,而是用邻接表和邻接矩阵来实现图结构.
邻接表与临接矩阵
上面的图很直观的表示出来了它们的区别.
我先给出它们的实现
// 邻接表
// graph[x] 存储 x 的所有邻居节点
List<Integer>[] graph;
// 邻接矩阵
// matrix[x][y] 记录 x 是否有一条指向 y 的边
boolean[][] matrix;
邻接表
在学习邻接表时,我们会看到 List[] 这样的数据结构,刚开始可能会觉得很奇怪,不明白为什么要这样写。尤其是看到邻接表的示意图时,可能会误以为“链表相连,链表里面是数组”,但实际上并不是这样。
如果我们仔细分析 List[],可以拆解成两个部分:
- 它首先是一个数组([] 说明是数组)。
- 数组的每个元素都是 List(说明数组存的是列表)。
为什么 List[] 适合表示图的邻接表?
我们先问自己一个问题:在一个图里,哪些数据是固定的?哪些是不固定的?
- 节点的个数是固定的(假设图有 N 个节点,它的编号通常是 0 ~ N-1)。
- 每个节点的邻接边数是不确定的(比如某个点的出度可能是 2,也可能是 5)。
那么,我们就需要一个既能存固定数量的节点,又能灵活存储每个节点的邻接点的数据结构:
- 数组适合存固定数量的节点
既然节点数是固定的,我们就可以用数组来存储所有节点。
例如 List[] graph = new ArrayList[N];,表示有 N 个节点,每个节点都有一个 List 来存邻接点。 - 列表(List)适合存每个节点的不定邻居
由于每个节点的邻接点数量不同,我们不能用固定大小的数组存储邻接点,而链表(List)的动态特性完美地解决了这个问题。
//举个例子:
graph[0] = new ArrayList<>(Arrays.asList(1, 2)); // 0 号节点连向 1 和 2
graph[1] = new ArrayList<>(Collections.singletonList(3)); // 1 号节点连向 3
List[] 既有数组的优势,又有链表的灵活性,非常适合表示图的邻接表.
邻接矩阵
我们可以看到是二维数据存储图,这种给人的感觉是力大砖飞,存储空间巨大,查询O(1),而且有向,无向图,有权,无权图都可以表示.
且二维数据也比较容易上手,一般学到图的也都有些了解,比较亲民的类型.
它的特点:
邻接矩阵的特点
| 特点 | 分析 |
|---|---|
| 存储空间 | O(N^2),如果 N 很大且边较少,会浪费大量内存 |
| 查询边 | O(1),直接访问 graph[i][j] |
| 添加边 | O(1),只需 graph[i][j] = 1 / weight |
| 删除边 | O(1),只需 graph[i][j] = 0 / INF |
| 遍历邻接点 | O(N),需要扫描整行 graph[i][*] |
| 适用于 | 稠密图(边的数量接近 N^2) |
适用算法总结
| 算法 | 邻接矩阵是否适合? | 理由 |
|---|---|---|
| BFS / DFS | ❌ 不适合 | 遍历邻接点太慢 O(N) |
| Dijkstra(最短路径) | ✅ 适合 | O(N^2) 适用于 小规模 图 |
| Floyd-Warshall(全源最短路) | ✅ 适合 | O(N^3) 适用于 稠密图 |
| Kruskal(最小生成树) | ❌ 不适合 | 需要转换成边列表 |
| Prim(最小生成树) | ✅ 适合 | O(N^2) 适用于 小规模 图 |
| 拓扑排序 | ❌ 不适合 | 需要遍历所有出边 |
什么时候用邻接矩阵?
- ✅ 当
M ≈ N^2(稠密图)时,存储邻接矩阵更合适。 - ✅ 当查询两点是否相连的次数特别多时,邻接矩阵更高效
O(1)。 - ✅ 当使用 Floyd-Warshall、Prim(O(N^2))等基于矩阵运算的算法时,邻接矩阵更合适。
什么时候不用邻接矩阵?
- ❌ 当
M ≪ N^2(稀疏图)时,邻接矩阵浪费空间。 - ❌ 当需要频繁遍历某个点的邻接点时,邻接表更高效。
- ❌ 当使用 BFS / DFS / Dijkstra / Kruskal 等以遍历为主的算法时,邻接表更合适。
临接表
邻接表的特点
| 特点 | 分析 |
|---|---|
| 存储空间 | O(N + M),只存储实际存在的边,适合 稀疏图 |
| 查询边 | O(deg(i)),需遍历 List[i] 查找 |
| 添加边 | O(1),直接 list[i].add(j) |
| 删除边 | O(deg(i)),需遍历 List[i] 删除 |
| 遍历邻接点 | O(deg(i)),比邻接矩阵快 |
| 适用于 | 稀疏图(边的数量远小于 N^2) |
适用算法总结
| 算法 | 邻接表是否适合? | 理由 |
|---|---|---|
| BFS / DFS | ✅ 适合 | 访问邻接点更快 O(deg(i)) |
| Dijkstra(最短路径) | ✅ 适合 | 使用 优先队列 + 邻接表 实现 O(M logN) |
| Floyd-Warshall(全源最短路) | ❌ 不适合 | 需要 O(N^2) 矩阵操作 |
| Kruskal(最小生成树) | ✅ 适合 | 本质是边列表,可直接排序 |
| Prim(最小生成树) | ✅ 适合 | 使用 优先队列 + 邻接表 实现 O(M logN) |
| 拓扑排序 | ✅ 适合 | 存出度更方便,遍历所有出边 O(M) |
什么时候用邻接表?
- ✅ 当
M ≪ N^2(稀疏图)时,邻接表更节省空间。 - ✅ 当频繁遍历某个点的邻接点时,邻接表更高效。
- ✅ 当使用 BFS / DFS / Dijkstra(堆优化)等遍历为主的算法时,邻接表更合适。
什么时候不用邻接表?
- ❌ 当
M ≈ N^2(稠密图)时,邻接表存储边的指针会浪费额外空间。 - ❌ 当查询两点是否相连的次数特别多时,邻接表查找
O(deg(i))比邻接矩阵O(1)慢。 - ❌ 当使用 Floyd-Warshall 这种基于矩阵运算的算法时,邻接表不适合。
临接表VS临接矩阵
那我们该如何选择用哪种数据结构去解决问题呢?
取决于边的数量(稀疏 vs. 稠密)
| 条件 | 适合的数据结构 | 原因 |
|---|---|---|
边数接近 N^2(稠密图) | 邻接矩阵 | 直接用二维数组存储,访问 O(1),遍历 O(N) 也可接受 |
边数远小于 N^2(稀疏图) | 邻接表 | 只存有效边,节省空间,遍历 O(deg(i)) 更高效 |
取决于执行的操作类型
| 操作 | 适用的数据结构 | 原因 |
|---|---|---|
| 快速查询两点是否相连 | ✅ 邻接矩阵 | O(1) 直接查 graph[i][j] |
| 遍历所有邻接点 | ✅ 邻接表 | O(deg(i)),比邻接矩阵 O(N) 快 |
| 快速添加 / 删除边 | ✅ 邻接表 | O(1) 添加,O(deg(i)) 删除(邻接矩阵删除 O(1) 但空间大) |
| Dijkstra(最短路径) | ✅ 邻接表 | 堆优化 Dijkstra O(M logN) 适合 稀疏图 |
| Floyd-Warshall(全源最短路) | ✅ 邻接矩阵 | O(N^3),使用矩阵更高效 |
| Kruskal(最小生成树) | ✅ 邻接表 | Kruskal 本质是 边列表,邻接表方便转换 |
| Prim(最小生成树) | ✅ 邻接表(堆优化) or 邻接矩阵 | 邻接表 + 堆 O(M logN),邻接矩阵 O(N^2) |
| BFS / DFS(遍历) | ✅ 邻接表 | O(M) 遍历比邻接矩阵 O(N^2) 快 |
| 拓扑排序 | ✅ 邻接表 | 存出度方便,遍历 O(M) |
选择策略总结
✅ 优先选邻接矩阵的情况
- 图是稠密图(
M ≈ N^2)。 - 需要快速查询两点是否相连,时间复杂度
O(1)。 - Floyd-Warshall(
O(N^3))需要矩阵运算。 - 小规模问题(N < 1000),邻接矩阵
O(N^2)可以接受。
✅ 优先选邻接表的情况
- 图是稀疏图(
M ≪ N^2)。 - 主要操作是遍历邻接点(BFS / DFS / Dijkstra / Prim / Kruskal)。
- Dijkstra(堆优化)或 Prim(堆优化),邻接表
O(M logN)效率更高。 - 适用于大规模图(
N很大,M远小于N^2)。
图结构的通用代码实现
我们可以抽象出一个 Graph 接口,来实现图的基本增删查改:
interface Graph {
// 添加一条边(带权重)
void addEdge(int from, int to, int weight);
// 删除一条边
void removeEdge(int from, int to);
// 判断两个节点是否相邻
boolean hasEdge(int from, int to);
// 返回一条边的权重
int weight(int from, int to);
// 返回某个节点的所有邻居节点和对应权重
List<Edge> neighbors(int v);
// 返回节点总数
int size();
}
有向加全图
邻接表实现
// 加权有向图的通用实现(邻接表)
class WeightedDigraph {
// 存储相邻节点及边的权重
public static class Edge {
int to;
int weight;
public Edge(int to, int weight) {
this.to = to;
this.weight = weight;
}
}
// 邻接表,graph[v] 存储节点 v 的所有邻居节点及对应权重
private List<Edge>[] graph;
public WeightedDigraph(int n) {
// 我们这里简单起见,建图时要传入节点总数,这其实可以优化
// 比如把 graph 设置为 Map<Integer, List<Edge>>,就可以动态添加新节点了
graph = new List[n];
for (int i = 0; i < n; i++) {
graph[i] = new ArrayList<>();
}
}
// 增,添加一条带权重的有向边,复杂度 O(1)
public void addEdge(int from, int to, int weight) {
graph[from].add(new Edge(to, weight));
}
// 删,删除一条有向边,复杂度 O(V)
public void removeEdge(int from, int to) {
for (int i = 0; i < graph[from].size(); i++) {
if (graph[from].get(i).to == to) {
graph[from].remove(i);
break;
}
}
}
// 查,判断两个节点是否相邻,复杂度 O(V)
public boolean hasEdge(int from, int to) {
for (Edge e : graph[from]) {
if (e.to == to) {
return true;
}
}
return false;
}
// 查,返回一条边的权重,复杂度 O(V)
public int weight(int from, int to) {
for (Edge e : graph[from]) {
if (e.to == to) {
return e.weight;
}
}
throw new IllegalArgumentException("No such edge");
}
// 上面的 hasEdge、removeEdge、weight 方法遍历 List 的行为是可以优化的
// 比如用 Map<Integer, Map<Integer, Integer>> 存储邻接表
// 这样就可以避免遍历 List,复杂度就能降到 O(1)
// 查,返回某个节点的所有邻居节点,复杂度 O(1)
public List<Edge> neighbors(int v) {
return graph[v];
}
public static void main(String[] args) {
WeightedDigraph graph = new WeightedDigraph(3);
graph.addEdge(0, 1, 1);
graph.addEdge(1, 2, 2);
graph.addEdge(2, 0, 3);
graph.addEdge(2, 1, 4);
System.out.println(graph.hasEdge(0, 1)); // true
System.out.println(graph.hasEdge(1, 0)); // false
graph.neighbors(2).forEach(edge -> {
System.out.println(2 + " -> " + edge.to + ", wight: " + edge.weight);
});
// 2 -> 0, wight: 3
// 2 -> 1, wight: 4
graph.removeEdge(0, 1);
System.out.println(graph.hasEdge(0, 1)); // false
}
}
临接矩阵
import java.util.ArrayList;
import java.util.List;
// 加权有向图的通用实现(邻接矩阵)
public class WeightedDigraph {
// 存储相邻节点及边的权重
public static class Edge {
int to;
int weight;
public Edge(int to, int weight) {
this.to = to;
this.weight = weight;
}
}
// 邻接矩阵,matrix[from][to] 存储从节点 from 到节点 to 的边的权重
// 0 表示没有连接
private int[][] matrix;
public WeightedDigraph(int n) {
matrix = new int[n][n];
}
// 增,添加一条带权重的有向边,复杂度 O(1)
public void addEdge(int from, int to, int weight) {
matrix[from][to] = weight;
}
// 删,删除一条有向边,复杂度 O(1)
public void removeEdge(int from, int to) {
matrix[from][to] = 0;
}
// 查,判断两个节点是否相邻,复杂度 O(1)
public boolean hasEdge(int from, int to) {
return matrix[from][to] != 0;
}
// 查,返回一条边的权重,复杂度 O(1)
public int weight(int from, int to) {
return matrix[from][to];
}
// 查,返回某个节点的所有邻居节点,复杂度 O(V)
public List<Edge> neighbors(int v) {
List<Edge> res = new ArrayList<>();
for (int i = 0; i < matrix[v].length; i++) {
if (matrix[v][i] > 0) {
res.add(new Edge(i, matrix[v][i]));
}
}
return res;
}
public static void main(String[] args) {
WeightedDigraph graph = new WeightedDigraph(3);
graph.addEdge(0, 1, 1);
graph.addEdge(1, 2, 2);
graph.addEdge(2, 0, 3);
graph.addEdge(2, 1, 4);
System.out.println(graph.hasEdge(0, 1)); // true
System.out.println(graph.hasEdge(1, 0)); // false
graph.neighbors(2).forEach(edge -> {
System.out.println(2 + " -> " + edge.to + ", wight: " + edge.weight);
});
// 2 -> 0, wight: 3
// 2 -> 1, wight: 4
graph.removeEdge(0, 1);
System.out.println(graph.hasEdge(0, 1)); // false
}
}
有向无权图
把addEdge的权重参数默认为1即可
无向加权图
无向加权图就等同于双向的有向加权图,所以直接复用上面用邻接表/领接矩阵实现的 WeightedDigraph 类就行了,只是在增加边的时候,要同时添加两条边:
// 无向加权图的通用实现
class WeightedUndigraph {
private WeightedDigraph graph;
public WeightedUndigraph(int n) {
graph = new WeightedDigraph(n);
}
// 增,添加一条带权重的无向边
public void addEdge(int from, int to, int weight) {
graph.addEdge(from, to, weight);
graph.addEdge(to, from, weight);
}
// 删,删除一条无向边
public void removeEdge(int from, int to) {
graph.removeEdge(from, to);
graph.removeEdge(to, from);
}
// 查,判断两个节点是否相邻
public boolean hasEdge(int from, int to) {
return graph.hasEdge(from, to);
}
// 查,返回一条边的权重
public int weight(int from, int to) {
return graph.weight(from, to);
}
// 查,返回某个节点的所有邻居节点
public List<WeightedDigraph.Edge> neighbors(int v) {
return graph.neighbors(v);
}
public static void main(String[] args) {
WeightedUndigraph graph = new WeightedUndigraph(3);
graph.addEdge(0, 1, 1);
graph.addEdge(1, 2, 2);
graph.addEdge(2, 0, 3);
graph.addEdge(2, 1, 4);
System.out.println(graph.hasEdge(0, 1)); // true
System.out.println(graph.hasEdge(1, 0)); // true
graph.neighbors(2).forEach(edge -> {
System.out.println(2 + " <-> " + edge.to + ", wight: " + edge.weight);
});
// 2 <-> 0, wight: 3
// 2 <-> 1, wight: 4
graph.removeEdge(0, 1);
System.out.println(graph.hasEdge(0, 1)); // false
System.out.println(graph.hasEdge(1, 0)); // false
}
}
结论
🚀 如果图很稀疏(M ≪ N²),或者要遍历(BFS/DFS/最短路),选 🔹 邻接表
⚡ 如果图很稠密(M ≈ N²),或者要频繁查询边权,选 🔸 邻接矩阵
一定要能熟练写出构建图的模版,深刻理解数据结构!!!