ORB-SLAM2编译、安装等问题汇总大全(Ubuntu20.04、eigen3、pangolin0.5、opencv3.4.10+4.2)
1:环境说明:
使用的Linux发行版本为Ubuntu 20.04
SLAM2下载地址为:git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
2:eigen版本为 3.2.10
下载地址:https://eigen.tuxfamily.org/index.php?title=Main_Page
3:pangolin版本为0.5,高版本在编译ORB-SLAM2时会出现很多问题
下载地址:https://github.com/stevenlovegrove/Pangolin/tree/v0.5
卸载pangolin:https://blog.csdn.net/qq_42257666/article/details/126069335
4:opencv版本为3.4.10,这个版本不会报错,这个要对应ros下载的opencv版本,如果为4.2就要下载4.2版本的opencv
下载地址:https://github.com/opencv/opencv/releases/tag/3.4.10
5:数据
数据下载地址:https://vision.in.tum.de/data/datasets/rgbd-dataset/download
###BOOST
https://sourceforge.net/projects/boost/files/boost/1.65.1/
1.安装:eigen版本为 3.2.10
2023-03-08 10-15-49屏幕截图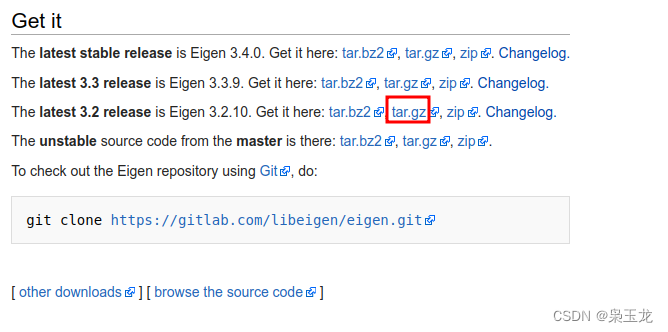
1:安装命令
cd eigen-3.2.10
mkdir build
cd build
cmake ..
sudo make install
sudo cp -r /usr/local/include/eigen3 /usr/include
增加软链接
sudo ln -s /usr/include/eigen3/Eigen /usr/include/Eigen
2:查看当前版本,验证是否安装成功
pkg-config --modversion eigen3
1.2:卸载eigen3
1:查询当前版本
pkg-config --modversion eigen3
2:查看eigen3位置相关文件
sudo updatedb
locate eigen3
3:删除eigen3相关文件
sudo rm -rf /usr/include/eigen3
sudo rm -rf /usr/lib/cmake/eigen3
sudo rm -rf /usr/local/include/eigen3
sudo rm -rf /usr/share/doc/libeigen3-dev
sudo rm -rf /usr/local/share/pkgconfig/eigen3.pc /usr/share/pkgconfig/eigen3.pc /var/lib/dpkg/info/libeigen3-dev.list /var/lib/dpkg/info/libeigen3-dev.md5sums
sudo rm -rf /usr/local/lib/pkgconfig/eigen3.pc
sudo rm -rf /usr/local/share/eigen3
4:查询是否已经删除
pkg-config --modversion eigen3
2:安装Pangolin0.5
下载:Pangolin
https://github.com/stevenlovegrove/Pangolin/tree/v0.5
安装依赖包:OpenGL,Glew
sudo apt install libgl1-mesa-dev
sudo apt install libglew-dev
创建build文件夹,cd到该目录中
mkdir build && cd build
cmake分析源代码
cmake ..
报错提示
Could NOT find OpenGL (missing: OPENGL_opengl_LIBRARY OPENGL_glx_LIBRARY
OPENGL_INCLUDE_DIR)
则需要安装:
sudo apt-fast install libgl1-mesa-dev
make编译源代码
sudo make -j4
make install安装
sudo make install
编译完成后可以测试一下
cd examples/HelloPangolin
./HelloPangolin
参考:https://blog.csdn.net/qq_42257666/article/details/125473414
因为ubuntu20.04安装ros会安装boost1.71.0版本,所以在进行安装1.71.0版本
查看boost版本
查看boost版本指令
dpkg -S /usr/include/boost/version.hpp
或者
cat /usr/include/boost/version.hpp
cmake安装后对其软链接
ln -sf /********/cmake/bin/* /usr/bin/
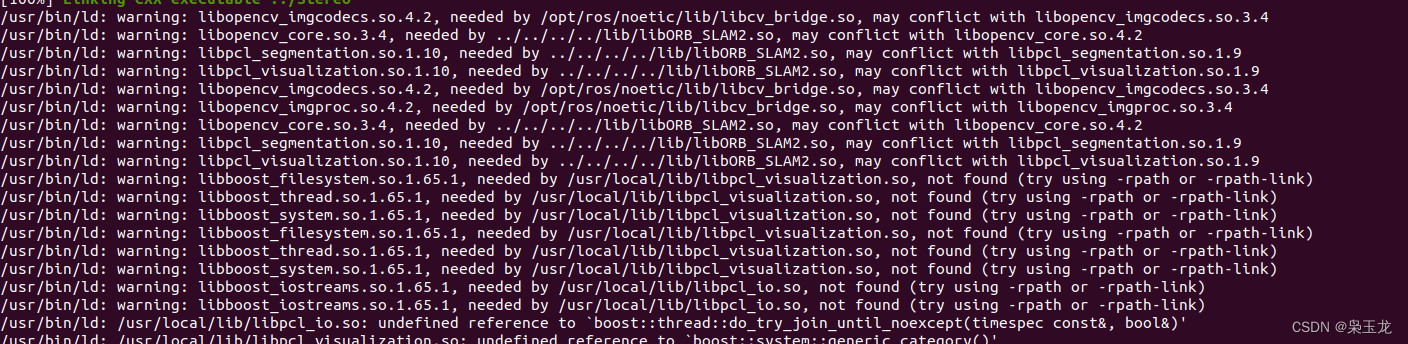
编译报错:libboost_filesystem.so.1.71.0, needed by /usr/local/lib/libpcl_visualization.so, not found (try using -rpath or -rpath-link)
查看 boost是什么版本和CMake是什么版本,以下对应关系
Boost 1.63需要CMake 3.7或更高版本。
Boost 1.64需要CMake 3.8或更高版本。
Boost 1.65和1.65.1需要CMake 3.9.3或更高版本。
Boost 1.66需要CMake 3.11或更高版本。
Boost 1.67需要CMake 3.12或更高版本。
Boost 1.68、1.69需要CMake 3.13或更新版本。
Boost 1.70需要CMake 3.14或更高版本。
Boost 1.71需要CMake 3.15.3或更高版本。
Boost 1.72需要CMake 3.16.2或更高版本。
Boost 1.73需要CMake 3.17.2或更高版本。
Boost 1.74需要CMake 3.19或更高版本。
Boost 1.75需要CMake 3.19.5或更高版本。
Boost 1.76需要CMake 3.20.3或更高版本。
Boost 1.77需要CMake 3.21.3或更高版本。
Boost 1.78需要CMake 3.22.2或更高版本。
Boost 1.79需要CMake 3.23.2或更高版本。
Boost 1.80需要CMake 3.24.2或更高版本。
我的是boost1.7.1所以又安装了一个1.65.1
安装:boost1.7.1 :
无脑操作
sudo ./bootstrap.sh --with-libraries=all --with-toolset=gcc
./bjam # 这里需要一会时间,配置环境
再运行命令进行安装
sudo ./b2 install # 不sudo的话,无法在 usr/include创建 boost文件夹
安装地址为:
/usr/local/include/boost
/usr/local/lib/libboost
自定义位置安装boost1.65
sudo ./bootstrap.sh --with-libraries=all --with-toolset=gcc
sudo mkdir /usr/local/opt/boost1.65
sudo ./b2 install --prefix=/usr/include/boost165
boost是自定安装的在进行配置
sudo gedit /etc/ld.so.conf
自定安装的lib地址进行添加
参考:https://blog.csdn.net/qq_44447544/article/details/122623300
3:安装opencv,opencv_contrib
注:这里opencv我安装了两个一个3.4.10和4.2.0的
1:安装依赖
sudo apt-get install cmake
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev libtiff5-dev
sudo apt-get install pkg-config
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
sudo apt-get -y install libgstreamer-plugins-base1.0-dev
sudo apt-get -y install libgstreamer1.0-dev
sudo apt-get install libvtk6-dev
安装前的必备包
这些安装不算十分完全,我只安装自己够用就成的某些包。
安装一些必要的库,还有cmake,git,g++。
sudo apt-get install build-essential
sudo apt-get install cmake git g++
安装依赖包
安装一些依赖包。
sudo apt-get install libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev libv4l-dev liblapacke-dev
sudo apt-get install checkinstall yasm libxine2-dev libgstreamer0.10-dev libgstreamer-plugins-base0.10-dev libfaac-dev libmp3lame-dev libtheora-dev
sudo apt-get install libopencore-amrnb-dev libopencore-amrwb-dev libavresample-dev x264 v4l-utils
处理图像所需的包
sudo apt-get install libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
处理视频所需包
sudo apt-get install libxvidcore-dev libx264-dev ffmpeg
opencv功能优化
sudo apt-get install libatlas-base-dev gfortran
部分依赖包
sudo apt-get install libopencv-dev libqt4-dev qt4-qmake libqglviewer-dev libsuitesparse-dev libcxsparse3.1.4 libcholmod3.0.6
sudo apt-get install python-dev python-numpy
可选依赖
sudo apt-get install libprotobuf-dev protobuf-compiler
sudo apt-get install libgoogle-glog-dev libgflags-dev
sudo apt-get install libgphoto2-dev libeigen3-dev libhdf5-dev doxygen
3.下载cmake-gui工具和mingw-w64
sudo apt install cmake-qt-gui
sudo apt install mingw-w64
2:下载安装opencv和opencv_contrib
opencv:下载地址:https://github.com/opencv/opencv/releases/tag/3.4.10
opencv_contrib :下载地址:https://github.com/opencv/opencv_contrib/tags?after=3.4.10
将opencv_contrib 添加到opencv-4.2文件中
2:编译安装
在 opencv-3.4.10文件夹中建立名为 build的文件夹,在build 目录下执行 cmake 和 make。
mkdir build
cd build
cmake -D CMAKE_INSTALL_PREFIX=/home/ubicast/opencv4 -DCMAKE_BUILD_TYPE=Release -DOPENCV_EXTRA_MODULES_PATH=../opencv_contrib-4.2.0/modules -D BUILD_opencv_python2=OFF -D BUILD_opencv_python3=OFF ..
CMAKE_INSTALL_PREFIX:这个是我自己创建的文件夹把opencv安装到此处
OPENCV_EXTRA_MODULES_PATH:这个就是opencv_contrib的地址
BUILD_opencv_python2=OFF -D BUILD_opencv_python3=OFF:这两个值我在编辑之前没有加会报错如下,加上了就没报错了。
没有加上:BUILD_opencv_python2=OFF -D BUILD_opencv_python3=OFF报的错
python/src2/cv2.cpp:68:94: error: ‘to’ is not a member of ‘PyOpenCV_Converter<cv::line_descriptor::KeyLine, void>’
ippicv下载问题,ippicv_2019_lnx_intel64_general_20180723.tgz:下载地址:https://download.csdn.net/download/qq_46107892/87971375
解决办法:
修改ippicv.cmake
vim ~/opencv/3rdparty/ippicv/ippicv.cmake #就是这个文件的路径
# 将47行的
"https://raw.githubusercontent.com/opencv/opencv_3rdparty/${IPPICV_COMMIT}ippicv/"
# 改为步骤1中手动下载的文件的本地路径(也就是将网络下载的模式改为本地文件下载的模式):
"file: 下载到的文件夹目录" #(仅供参考,根据自己的路径填写)
进行安装opencv
make -j8
sudo make install
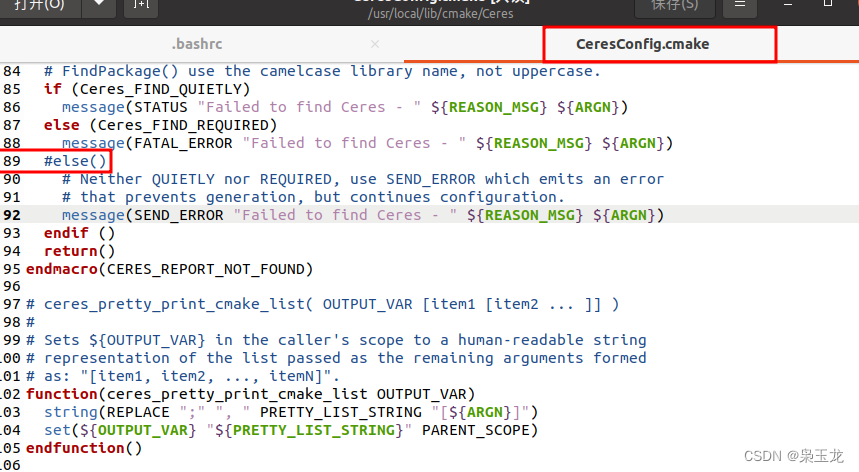
安装报错:/usr/local/lib/cmake/Ceres/CeresConfig.cmake:89,A duplicate ELSE command was found inside an IF block
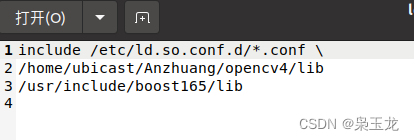
sudo gedit /etc/ld.so.conf
include /etc/ld.so.conf.d/*.conf \
/home/ubicast/Anzhuang/opencv4/lib
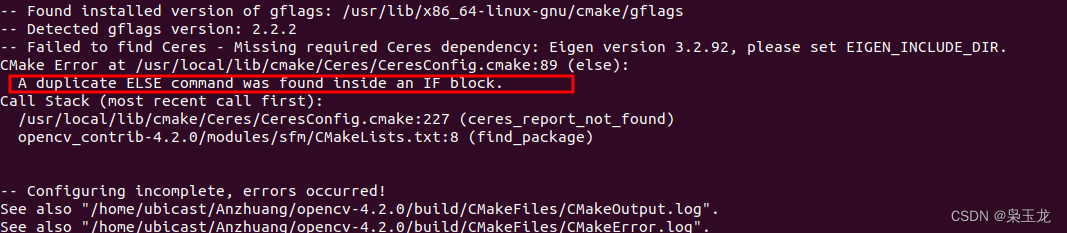
找到文件:/usr/local/lib/cmake/Ceres/CeresConfig.cmake进行else()注释掉
Call Stack (most recent call first):
opencv_contrib-4.2.0/modules/xfeatures2d/cmake/download_boostdesc.cmake:22 (ocv_download)
opencv_contrib-4.2.0/modules/xfeatures2d/CMakeLists.txt:11 (download_boost_descriptors)
-- xfeatures2d/vgg: Download: vgg_generated_48.i


home/zhang/slam/opencv-3.4.5/opencv_contrib/modules/xfeatures2d/src/boostdesc.cpp:653:20: fatal error: boostdesc_bgm.i: 没有那个文件或目录
#include “boostdesc_bgm.i”
是少一些文件,网络下载延迟,解决下载地址
链接:https://pan.baidu.com/s/17XhXX_cLz46bsj9ZWRkNIg
提取码:p50x
解决方案:
把下列压缩包解压到目录opencv_contrib/modules/xfeatures2d/src/下即可
报错:fatal error: features2d/test/test_detectors_regression.impl.hpp: 没有那个文件或目录
#include “features2d/test/test_detectors_regression.impl.hpp”

头文件include地址不对,解决方法如下:
将opencv-4.1.0/modules/features2d/test/文件下的
test_descriptors_invariance.impl.hpp
test_descriptors_regression.impl.hpp
test_detectors_invariance.impl.hpp
test_detectors_regression.impl.hpp
test_invariance_utils.hpp
拷贝到opencv_contrib-4.1.0/modules/xfeatures2d/test/文件下。
同时,将opencv_contrib-4.1.0/modules/xfeatures2d/test/test_features2d.cpp文件下的
#include "features2d/test/test_detectors_regression.impl.hpp"
#include "features2d/test/test_descriptors_regression.impl.hpp"
改成:
#include "test_detectors_regression.impl.hpp"
#include "test_descriptors_regression.impl.hpp"
将opencv_contrib-4.1.0/modules/xfeatures2d/test/test_rotation_and_scale_invariance.cpp文件下的
#include "features2d/test/test_detectors_invariance.impl.hpp"
#include "features2d/test/test_descriptors_invariance.impl.hpp"
改成:
#include "test_detectors_invariance.impl.hpp"
#include "test_descriptors_invariance.impl.hpp"
链接:https://www.codenong.com/cs106137508/
相机报错
4.安装
sudo make install
3:环境配置
动态库配置
sudo gedit /etc/ld.so.conf.d/opencv.conf
添加
注这里有opencv4的都是我第二个opencv
/usr/local/lib
/home/ubicast/opencv4/lib
保存后,终端内执行
sudo ldconfig
更新 PKG_CONFIG_PATH
sudo gedit /etc/bash.bashrc
文末添加
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/home/ubicast/opencv4/lib/pkgconfig
export PKG_CONFIG_PATH
找不到opencv.pc,进行在pkgconfig文件夹中进行创建:opencv.pc文件
prefix=/home/opencv42/
exec_prefix=${prefix}
includedir=${prefix}/include
libdir=${exec_prefix}/lib
Name: opencv
Description: The opencv library
Version:4.2.0
Cflags: -I${includedir}/opencv4
Libs: -L${libdir} -lopencv_shape -lopencv_stitching -lopencv_objdetect -lopencv_superres -lopencv_videostab -lopencv_calib3d -lopencv_features2d -lopencv_highgui -lopencv_videoio -lopencv_imgcodecs -lopencv_video -lopencv_photo -lopencv_ml -lopencv_imgproc -lopencv_flann -lopencv_core
~
此时可以给opencv2文件夹手动创建一个软链接
cd /usr/local/include/
sudo ln -s opencv4/opencv2 opencv2
相关文档:https://blog.csdn.net/m0_46825740/article/details/127302965
4:保存后,终端执行
source /etc/bash.bashrc
sudo updatedb
若出现 sudo: updatedb: command not found,执行 sudo apt install mlocate 后再次操作即可。
5:验证
pkg-config opencv --modversion
pkg-config --modversion opencv
pkg-config --cflags opencv
pkg-config --libs opencv
辅助链接:https://blog.csdn.net/u013454780/article/details/128357962
4:安装Realsense SDK
realsense安装
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
安装ROS版本的realsense2_camera
sudo apt-get install ros-$ROS_DISTRO-realsense2-camera
sudo apt-get install ros-$ROS_DISTRO-realsense2-description
安装rgbd-launch
rgbd_launch是一组打开RGBD设备,并load 所有nodelets转化 raw depth/RGB/IR 流到深度图(depth image), 视差图(disparity image)和点云(point clouds)的launch文件集。
sudo apt-get install ros-noetic-rgbd-launch
下面两个是部署 librealsense2 udev 规则,构建和激活内核模块、运行时库和可执行的演示和工具
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
可选择安装开发人员和调试包
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
连接英特尔实感深度摄像头并运行:realsense-viewer 以验证安装
realsense-viewer
ubuntu下创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
git下来realsense包到这个空间
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
编译安装
cd ..
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
添加
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
启动
roslaunch realsense2_camera rs_camera.launch
查看
rostopic list
启动rviz
rviz
报错:librealsense2.so.2.50: cannot open shared object file: No such file or directory)
原因:
找不到librealsense2.so.2.50
解决方法:librealsense2.so.2.50 复制到 /opt/ros/noetic/lib文件夹中
sudo cp /opt/ros/noetic/lib/x86_64-linux-gnu/librealsense2.so.2.50 /opt/ros/noetic/lib
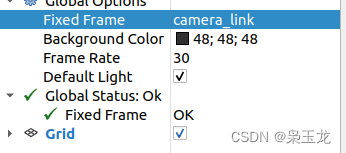
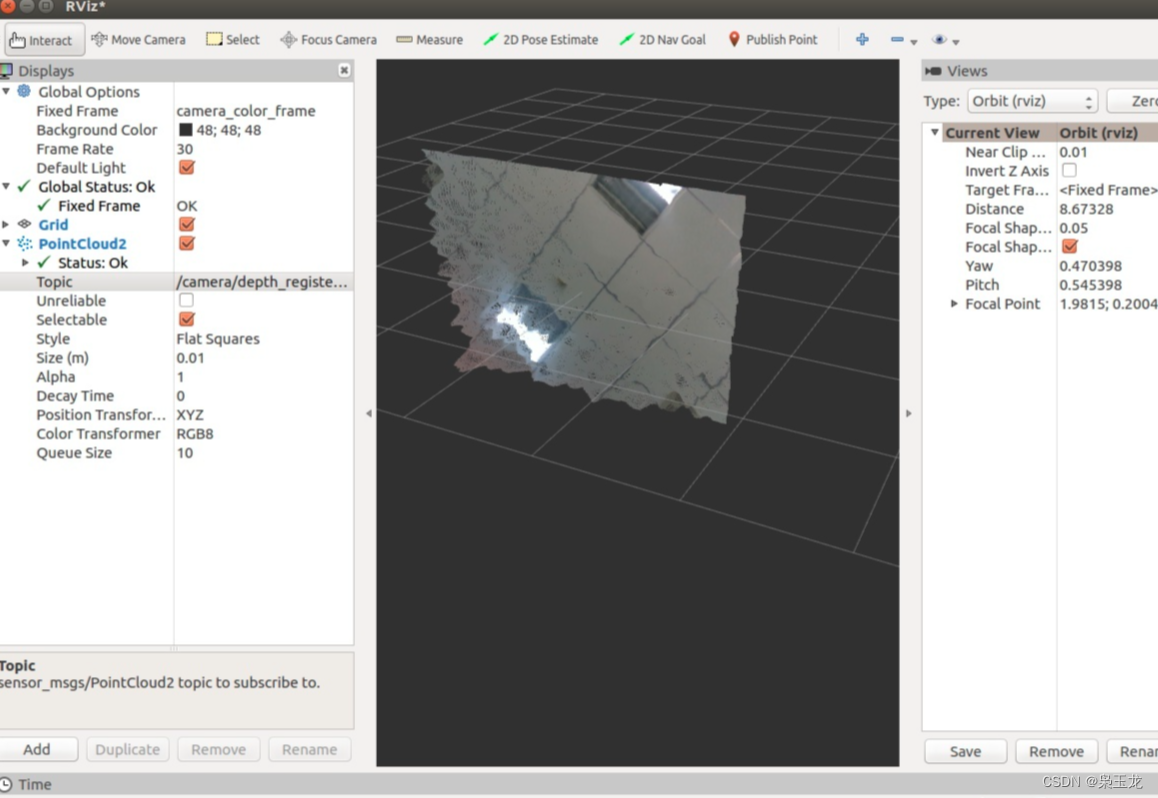
演示图
设置成:camera_link
添加图片
添加pointcloud2
另一种方法安装
#安装RealSense-ROS
mkdir -p ~/catkin_ws/src
git clone https://github.com/IntelRealSense/realsense-ros.git
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
cd ~/catkin_ws
catkin_make clean
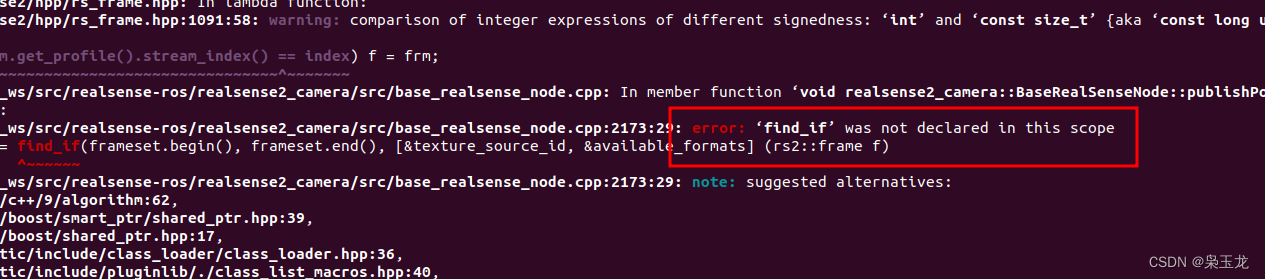
报错:

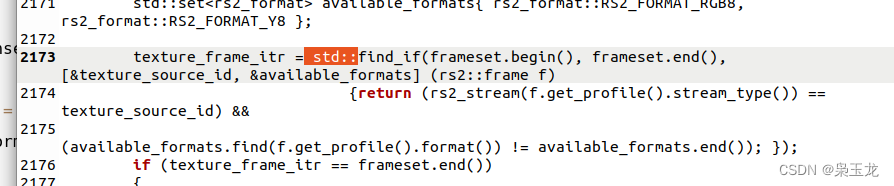
realsense2_camera/src/base_realsense_node.cpp:2173:29: error: ‘find_if’ was not declared in this scope
2173 | texture_frame_itr = find_if(frameset.begin(), frameset.end(), [&texture_source_id, &available_formats] (rs2::frame f)
| ^~~~~~~
解决
std::
报错:
没有规则可制作目标“/usr/lib/x86_64-linux-gnu/libopencv_calib3d.so.4.2.0”,由“/home/ubicast/RealSense-ROS/catkin_ws/devel/lib/librealsense2_camera.so” 需求。 停止。

注:因为之前我安装的就是opencv4.2,然后安装了ROS后又把opencv4删除了,但是链接还是opencv4,所有再进行安装,但是libopencv_calib3d.so.4.2.0不在lib/x86_64-linux-gnu中了,所以把opencv4/lib、中的***.so文件都复制到:/x86_64-linux-gnu
没有规则可制作目标“/usr/lib/x86_64-linux-gnu/libopencv_calib3d.so.4.2.0
解决:把报错缺少的都复制过去就可以了
sudo cp /home/ubicast/Anzhuang/opencv4/lib/libopencv_imgproc.so.4.2 /usr/lib/x86_64-linux-gnu/libopencv_imgproc.so.4.2
编辑安装
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
把我们工作空间的环境变量设置到bash中
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
注意我写到~/.bashrc中就报错了
/opt/ros/noetic/lib/nodelet/nodelet: symbol lookup error: /home/ubicast/RealSense-ROS/catkin_ws/devel/lib//librealsense2_camera.so: undefined symbol: _ZN20ddynamic_reconfigure19DDynamicReconfigureC1ERKN3ros10NodeHandleE
[camera/realsense2_camera_manager-1] process has died [pid 109818, exit code 127, cmd /opt/ros/noetic/lib/nodelet/nodelet manager __name:=realsense2_camera_manager __log:=/home/ubicast/.ros/log/acec16ca-ace4-11ed-ab81-67a4482d9b18/camera-realsense2_camera_manager-1.log].
log file: /home/ubicast/.ros/log/acec16ca-ace4-11ed-ab81-67a4482d9b18/camera-realsense2_camera_manager-1*.log
解决
后面直接把 echo "source ~/catkin_ws/devel/setup.bash"删掉就好了
1:打开:rs_camera.launch
roslaunch realsense2_camera rs_camera.launch
2.在rviz中测试相机
运行相机节点,打开终端输入
roslaunch realsense2_camera rs_camera.launch
再打开一个终端输入
rviz
1:下载source
git clone https://github.com/IntelRealSense/librealsense
cd librealsense
2:安装依赖项
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
3:Install Intel Realsense permission scripts located in librealsense source directory:
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && udevadm trigger
4:这边需要注意把realsense拔下来
Build and apply patched kernel modules for:
根据不同的ubuntu版本安装:对于Ubuntu 14/16/18 LTS
./scripts/patch-realsense-ubuntu-lts.sh
sudo dmesg | tail -n 50
这里可以看一下UVC是否安装成功了
5:基于cmake的编译
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make
sudo make install
-DBUILD_EXAMPLES=true 这个选项表示带演示和教程的
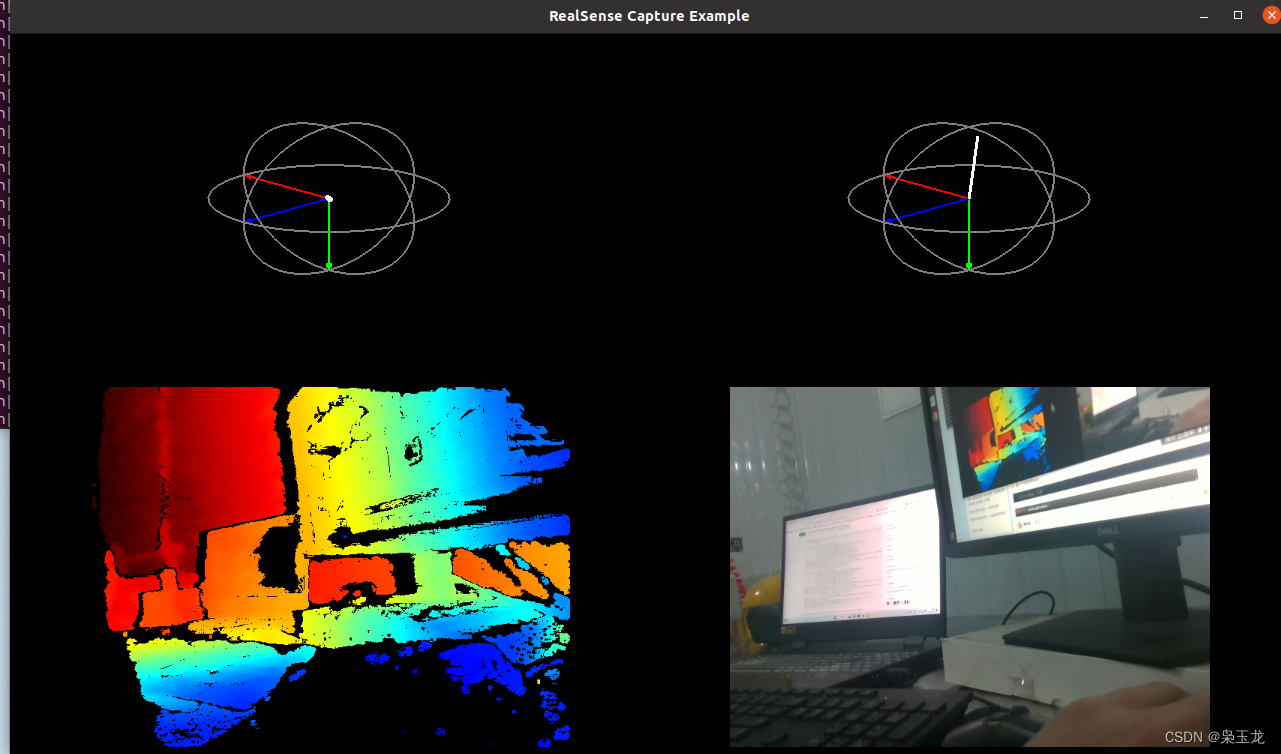
6:进入/librealsense/build/examples/capture,试一下效果
./rs-capture
解决方案:
找到:/catkin_ws/src/realsense-ros/realsense2_camera/src/base_realsense_node.cpp:2173:29
在报错的地方添加
std::

5:ros下驱动realsense相机获取点云
安装依赖
sudo apt-get install ros-$ROS_DISTRO-realsense2-camera
方法1:
1:查看内核版本
uname -r : 显示操作系统的发行版号
如果>=4.4.0-50的版本就可以继续向下进行了,否则需要升级你的Ubuntu内核。
读取点云
2:安装rgbd.launch
cd ~/catkin_ws/src/
git clone https://github.com/ros-drivers/rgbd_launch.git
cd ..
catkin_make
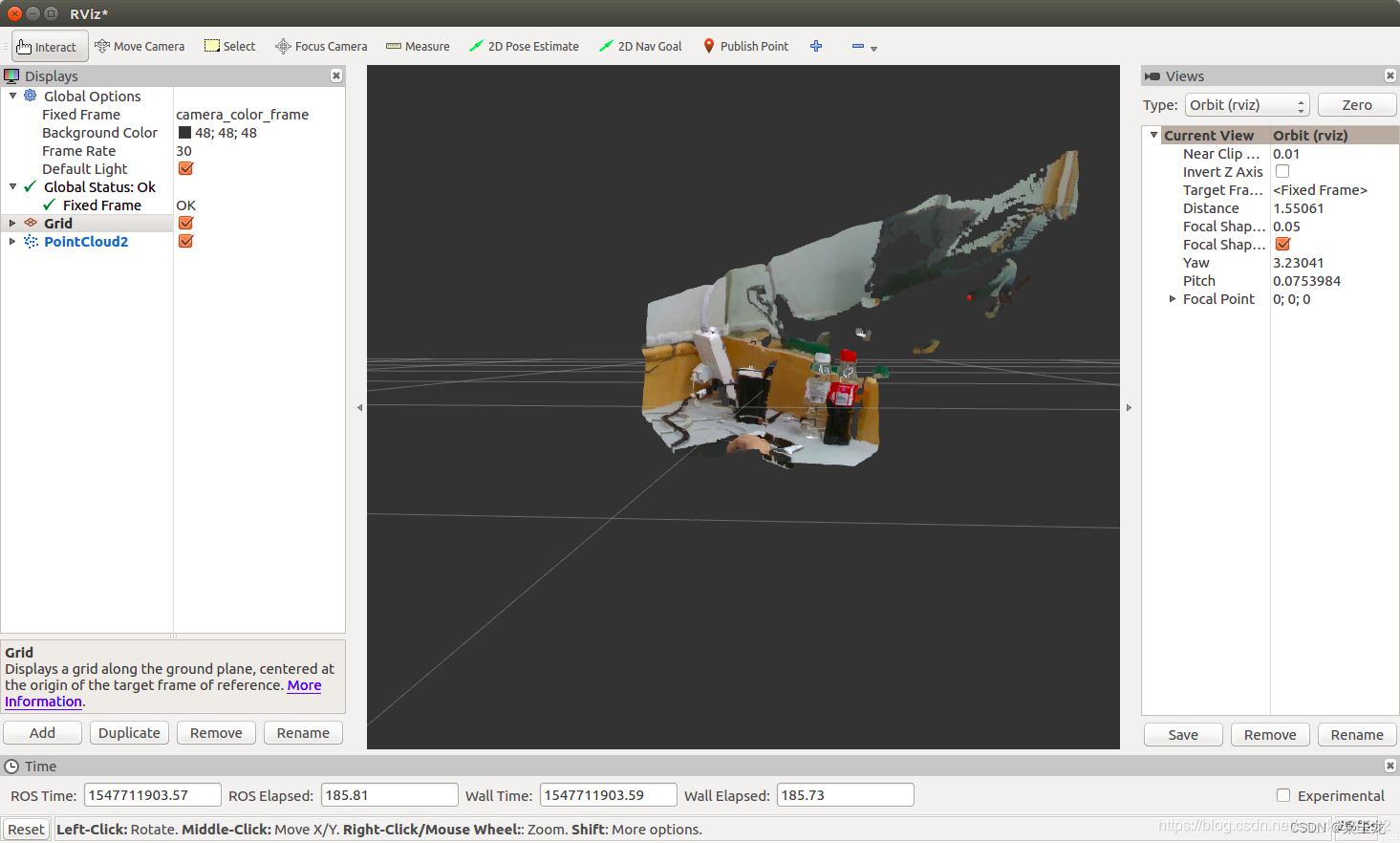
将rs_rgbd.launch和rs_camera.launch文件中的<arg name="enable_pointcloud" default="false"/>由false改为true
roslaunch realsense2_camera rs_rgbd.launch
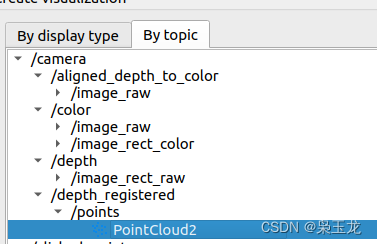
点击add 选择PointCloud2进行display,选择Fixed Frame和Topic,如图所示
方法2:
1:建立workspace,已经有的可以跳过
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
catkin_init_workspace
cd ..
catkin_make
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
2:在catkin_ws/src/下载源程序
cd src
git clone https://github.com/intel-ros/realsense.git
3:catkin_make
cd ..
catkin_make
4:如果没有错误说明,已经装好了,启动相机节点
roslaunch realsense2_camera rs_rgbd.launch
5:看一下发布的topic
rostopic list
6:若不进行标定,可以先从Realsense ROS Wrapper发布的topic中获得相机的内参。
rostopic echo /camera/color/camera_info
rostopic echo /camera/aligned_depth_to_color/camera_info
3:方法3 Step3 安装基于ROS使用RealSense的包
官方教程
1:安装
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
Clone the latest Intel® RealSense™ ROS from here into ‘catkin_ws/src/’
把realsense这个文件下载/克隆到该目录下
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
2:检验是否能在ros使用realsense相机:
install rgbd_launch
sudo apt-get install ros-kinetic-rgbd-launch
roslaunch realsense2_camera rs_rgbd.launch
再打开一个终端,输入rviz
此时并不能看到什么结果
左上角 Displays 中 Fixed Frame 选项中,下拉菜单选择 camera_link
这是主要到Global Status变成了绿色
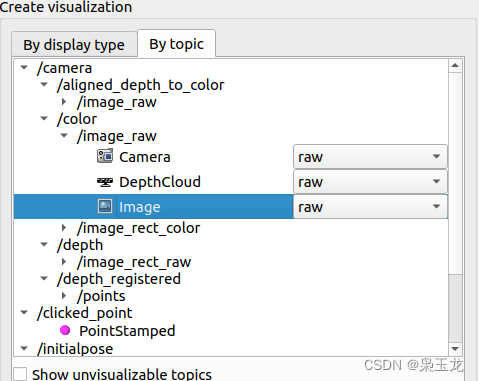
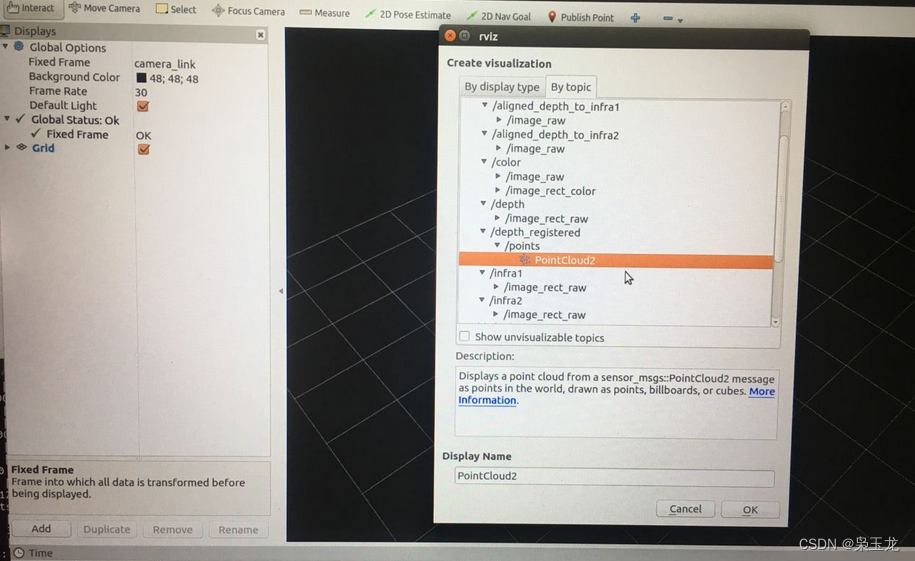
点击该框中的Add -> 上方点击 By topic -> /depth_registered 下的 /points 下的/PointCloud2
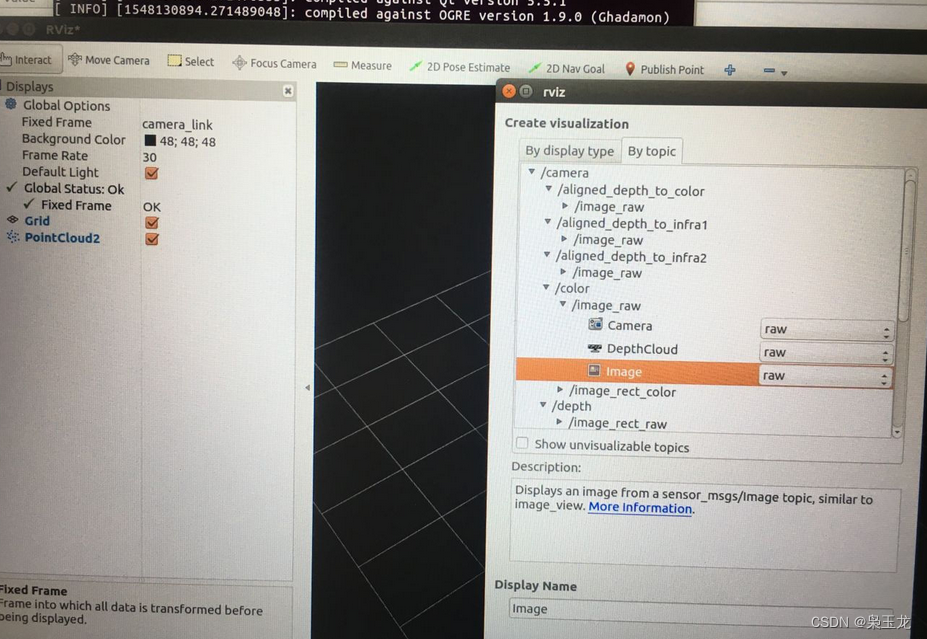
点击该框中的Add -> 上方点击 By topic -> /color 下的 /image_raw 下的image
见下图:
6:下载ORB_SLAM2:
下载ORB_SLAM2
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
cd ORB_SLAM2
2:修改build.sh文件
这时候打开文件夹里的build.sh文件,默认是make -j,如果不改容易引起系统卡死。改为make -j4即可(数字为电脑CPU的核心数),或者去掉-j。
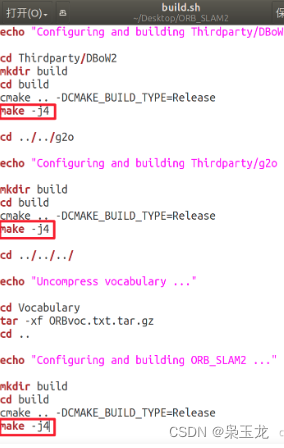
2.1:如果多线程编译错误
把build.sh的make -j改成make(这是为了防止多线程编译出错,对于build_ros.sh文件也是同理,下面就不说了)
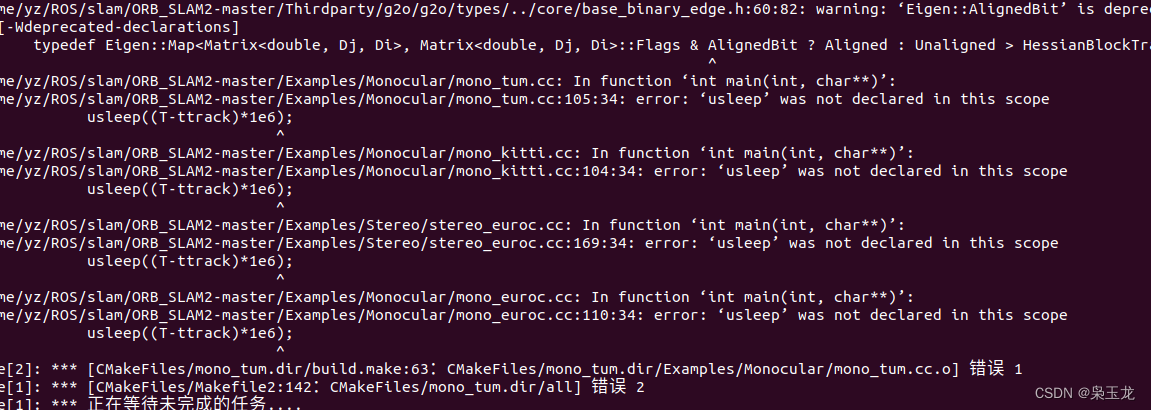
3:为了避免编译时出现usleep的错误,相应文件添加 #include<unistd.h>,具体有
/src/LocalMapping.cc
/src/System.cc
/src/LoopClosing.cc
/src/Tracking.cc
/src/Viewer.cc
/Examples/Monocular/mono_tum.cc
/Examples/Monocular/mono_kitti.cc
/Examples/Monocular/mono_euroc.cc
/Examples/RGB-D/rgbd_tum.cc
/Examples/Stereo/stereo_kitti.cc
/Examples/Stereo/stereo_euroc.cc
4:编译安装
cd ORB_SLAM2
chmod +x build.sh
运行build.sh
./build.sh
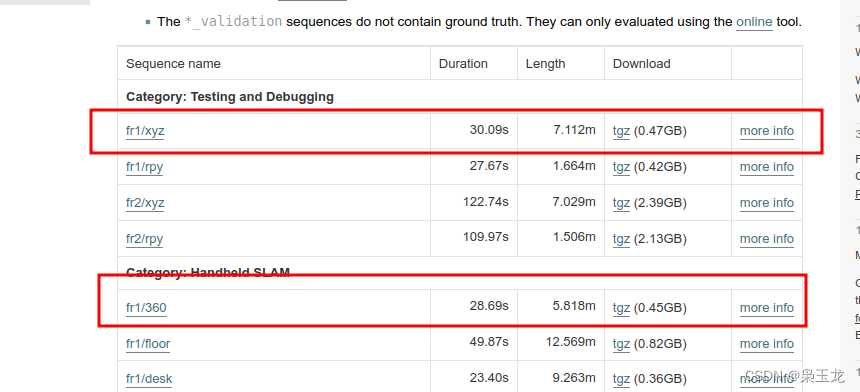
5:下载数据集
我使用的是TUM数据集,在
https://vision.in.tum.de/data/datasets/rgbd-dataset/download
6:下载rgbd_dataset_freiburg1_xyz即可,解压
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml PATH_TO_SEQUENCE_FOLDER
PATH_TO_SEQUENCE_FOLDER是你文件的地址。
然后就开始运行例程了,贴图:
7:将PATH_TO_SEQUENCE_FOLDER更换成下载后的文件的地址。
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml /home/ubicast/data/rgbd_dataset_freiburg1_xyz
7:编辑报错
1: 报错及处理:error: ‘AV_PIX_FMT_XVMC_MPEG2_MC’ was not declared in this scope
参考:https://blog.csdn.net/Robert_Q/article/details/121690089
2:详细报错信息
/home/andy/Downloads/Pangolin/src/video/drivers/ffmpeg.cpp: In function ‘std::__cxx11::string pangolin::FfmpegFmtToString(AVPixelFormat)’:
/home/andy/Downloads/Pangolin/src/video/drivers/ffmpeg.cpp:41:41: error: ‘AV_PIX_FMT_XVMC_MPEG2_MC’ was not declared in this scope
参考:https://github.com/stevenlovegrove/Pangolin/pull/318/files?diff=split&w=0
3:解决办法:在/Pangolin/CMakeModules/FindFFMPEG.cmake中63,64行
3.1:更改代码
sizeof(AVFormatContext::max_analyze_duration2);
}" HAVE_FFMPEG_MAX_ANALYZE_DURATION2
换成
sizeof(AVFormatContext::max_analyze_duration);
}" HAVE_FFMPEG_MAX_ANALYZE_DURATION
3.2:/Pangolin/src/video/drivers/ffmpeg.cpp中第37行 namespace pangolin上面加上
#define CODEC_FLAG_GLOBAL_HEADER AV_CODEC_FLAG_GLOBAL_HEADER
3.3:更改代码第78,79行
TEST_PIX_FMT_RETURN(XVMC_MPEG2_MC);
TEST_PIX_FMT_RETURN(XVMC_MPEG2_IDCT);
改为
#ifdef FF_API_XVMC
TEST_PIX_FMT_RETURN(XVMC_MPEG2_MC);
TEST_PIX_FMT_RETURN(XVMC_MPEG2_IDCT);
#endif
3.4:更改代码101-105行
TEST_PIX_FMT_RETURN(VDPAU_H264);
TEST_PIX_FMT_RETURN(VDPAU_MPEG1);
TEST_PIX_FMT_RETURN(VDPAU_MPEG2);
TEST_PIX_FMT_RETURN(VDPAU_WMV3);
TEST_PIX_FMT_RETURN(VDPAU_VC1);
改为
#ifdef FF_API_VDPAU
TEST_PIX_FMT_RETURN(VDPAU_H264);
TEST_PIX_FMT_RETURN(VDPAU_MPEG1);
TEST_PIX_FMT_RETURN(VDPAU_MPEG2);
TEST_PIX_FMT_RETURN(VDPAU_WMV3);
TEST_PIX_FMT_RETURN(VDPAU_VC1);
#endif
3.5:更改代码第127行
TEST_PIX_FMT_RETURN(VDPAU_MPEG4);
改为
#ifdef FF_API_VDPAU
TEST_PIX_FMT_RETURN(VDPAU_MPEG4);
#endif
4:error: ‘AVFMT_RAWPICTURE’ was not declared in this scope
#define TEST_PIX_FMT_RETURN(fmt) case AV_PIX_FMT_##fmt: return #fmt; /home/andy/Downloads/Pangolin/src/video/drivers/ffmpeg.cpp: In member
function ‘void
pangolin::FfmpegVideoOutputStream::WriteFrame(AVFrame*)’:
/home/andy/Downloads/Pangolin/src/video/drivers/ffmpeg.cpp:572:39:
error: ‘AVFMT_RAWPICTURE’ was not declared in this scope
if (recorder.oc->oformat->flags & AVFMT_RAWPICTURE) {
4.1:解决办法,在Pangolin/include/pangolin/video/drivers/ffmpeg.h开头加上
#define AV_CODEC_FLAG_GLOBAL_HEADER (1 << 22)
#define CODEC_FLAG_GLOBAL_HEADER AV_CODEC_FLAG_GLOBAL_HEADER
#define AVFMT_RAWPICTURE 0x0020
2:报错:error: static assertion failed: std::map must have the same value_type as its allocato
/usr/include/c++/8.1.0/bits/stl_map.h: In instantiation of ‘class std::map<ORB_SLAM2::KeyFrame*, g2o::Sim3, std::less<ORB_SLAM2::KeyFrame*>, Eigen::aligned_allocator<std::pair<const ORB_SLAM2::KeyFrame*, g2o::Sim3> > >’:
/home/zach/Projects/ORB-SLAM/ORB_SLAM2/src/Optimizer.cc:818:37: required from here
/usr/include/c++/8.1.0/bits/stl_map.h:122:21: error: static assertion failed: std::map must have the same value_type as its allocator
static_assert(is_same<typename _Alloc::value_type, value_type>::value,
这个可以参考
https://github.com/raulmur/ORB_SLAM2/pull/585
这篇文字上的解答,具体需要:

3: ‘usleep’ was not declared in this scope
8:制作自己的数据集(单目)
1、下载我给的这两个文档===>文档< 9527,一个CPP,一个yaml文件,将其复制到ORB_SLAM2下面,再用自己的手机拍一个视频,1、手机横向,2、开始拍摄时,首先手机左右缓慢水平移动,像螃蟹一样横着左右运动!,然后大概5s后,再慢慢往前走,不要走的太快,转弯时不要太快,以防跟踪丢失!,我录制了2分钟,
2、录制完成后,将其复制到ORB_SLAM2文件下,重命名为test.mp4,用微信传到电脑时,最好选择原图传送!,
3、以上步骤完成后,ORB_SLAM2里面应该多了三个文件:test.cpp,test.yaml,test.mp4.检查一下啊
4、修改ORB_SLAM2里面的CMakeLists.txt,添加如下代码:保存
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR})
add_executable(test test.cpp)
target_link_libraries(test ${PROJECT_NAME})
5、编译运行
打开一个新终端,输入如下:
cd ORB_SLAM2
mkdir build
cd build
cmake ..
make -j
cd ..
./test
9:D435i相机跑ORB_SLAM2
1.修改一个文件
修改ORB_SLAM2/Examples/ROS/ORB_SLAM2/src/ros_rgbd.cc文件
//message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/rgb/image_raw", 1);
//message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "camera/depth_registered/image_raw", 1);
message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/color/image_raw", 1);
message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "/camera/aligned_depth_to_color/image_raw", 1);
配置参数
sudo gedit ~./dashrc
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/ubicast/ROS/ROS_slam2/catkin_ws/src/ORB_SLAM2/Examples/ROS
source /home/ubicast/ROS/ROS_slam2/catkin_ws/devel/setup.sh
2.重新编译 ./build_ros.sh
构建ROS目录环境
mkdir catkin_ws
cd catkin_ws
mkdir src
cd src
catkin_init_workspace
再把编译成功的ORB_SLAM2文件复制到src中
进入 ORB_SLAM2 文件夹
cd ORB_SLAM2
在/home/youzhu/ROS/catkin_ws/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/CMakeLists.txt中增添boost地址否则报错:undefined reference to `boost::system::system_category()找不到boost
add_definitions(-DBOOST_ERROR_CODE_HEADER_ONLY)
add_definitions(-DBOOST_SYSTEM_NO_DEPRECATED)
set(Boost_NO_BOOST_CMAKE ON)
set(BOOST_ROOT "/usr/include")
给 build_ros.sh 文件权限
在ORB_SLAM2/include/system.h添加:#include<unistd.h>否则报错:error: ‘usleep’ was not declared in this scope
error: ‘usleep’ was not declared in this scope
修改 ORB_SLAM2/include/system.h
添加:
#include<unistd.h>
开始编辑
chmod +x build_ros.sh
编译 build_ros.sh 文件
./build_ros.sh
在编译的时候是有报错的
CMake Error at /usr/share/cmake-3.16/Modules/FindPackageHandleStandardArgs.cmake:146 (message):
Could NOT find PythonInterp: Found unsuitable version "2.7.18", but
required is at least "3" (found /usr/bin/python)
找到PYTHON_EXECUTABLE,更新为同路径下的Python3解决
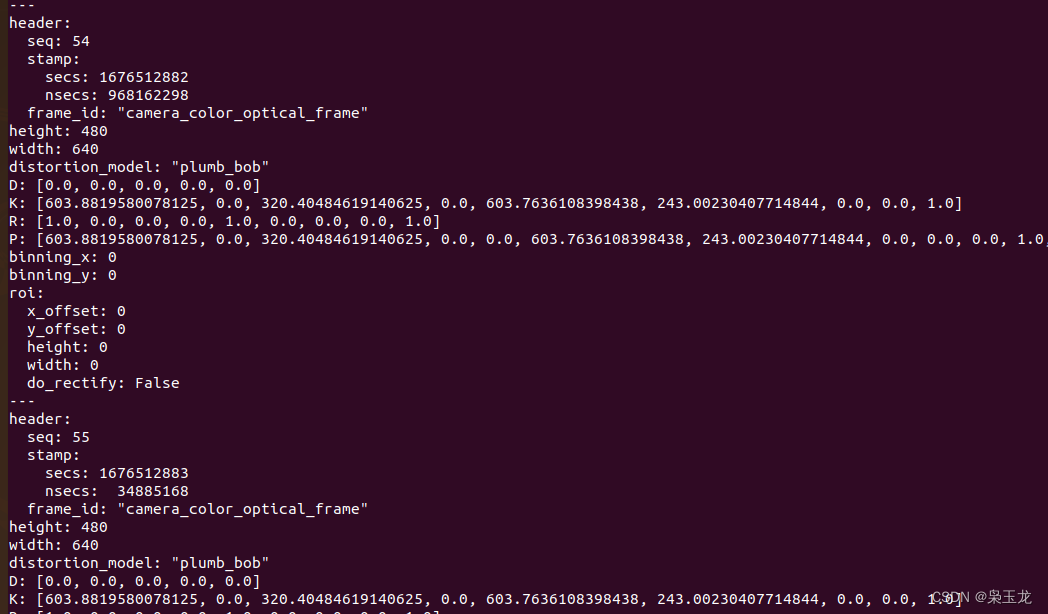
3.查看相机内参
打开一个终端输入
roslaunch realsense2_camera rs_rgbd.launch
再打开一个终端输入
rostopic echo /camera/color/camera_info
4.创建配置文件
切换到ORB_SLAM2/Examples/ROS/ORB_SLAM2目录下
打开终端输入
cd ORB_SLAM2/Examples/ROS/ORB_SLAM2
新建MyD435i.yaml文件,在终端里输入
touch MyD435i.yaml
将以下内容复制到MyD435i.yaml文件里并保存
%YAML:1.0
#--------------------------------------------------------------------------------------------
# Camera Parameters. Adjust them!
#--------------------------------------------------------------------------------------------
# Camera calibration and distortion parameters (OpenCV)
Camera.fx: 603.8819580078125
Camera.fy: 603.994873
Camera.cx: 320.493347
Camera.cy: 243.377410
Camera.k1: 0.0
Camera.k2: 0.0
Camera.p1: 0.0
Camera.p2: 0.0
Camera.p3: 0.0
Camera.width: 640
Camera.height: 480
# Camera frames per second
Camera.fps: 30.0
# IR projector baseline times fx (aprox.)
# bf = baseline (in meters) * fx, D435i的 baseline = 50 mm
Camera.bf: 50.0
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1
# Close/Far threshold. Baseline times.
ThDepth: 40.0
# Deptmap values factor
DepthMapFactor: 1000.0
#--------------------------------------------------------------------------------------------
# ORB Parameters
#--------------------------------------------------------------------------------------------
# ORB Extractor: Number of features per image
ORBextractor.nFeatures: 1000
# ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.scaleFactor: 1.2
# ORB Extractor: Number of levels in the scale pyramid
ORBextractor.nLevels: 8
# ORB Extractor: Fast threshold
# Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
# Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
# You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
#--------------------------------------------------------------------------------------------
# Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1
Viewer.GraphLineWidth: 0.9
Viewer.PointSize:2
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500
PointCloudMapping.Resolution: 0.01
meank: 50
thresh: 2.0
5.运行
在ORB_SLAM2文件夹下打开一个终端输入
roslaunch realsense2_camera rs_rgbd.launch
在ORB_SLAM2文件夹下再打开一个终端输入
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/MyD435i.yaml
10:ORB-SLAM2_modified 构建点云
1:从高博的 github repo 下载源文件
git clone https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map.git
下载:rgbd_dataset_freiburg1_xyz.bag资源文件,
https://cvg.cit.tum.de/rgbd/dataset/freiburg1/rgbd_dataset_freiburg1_xyz.bag
放入到datasets文件中
2:单独把ORB-SLAM2_modified提取出来
再然后把原本 ORB SLAM2 中的 Vocabulary 文件夹整个拷贝过来,放到 ORB_SLAM2_modified 路径下。
3:开始进行编译
首先把~/ORB_SLAM2_modified/cmake-build-debug, ~/ORB_SLAM2_modified/Thirdparty/DBoW2/build , ~/ORB_SLAM2_modified/Thirdparty/g2o/build 这三个 build 文件夹删掉
运行ORB_SLAM2_modified 中的 build.sh,进行编译
./build.sh
ORB_SLAM2_modified下的CMakeLists.txt文件内容
cmake_minimum_required(VERSION 2.8)
project(ORB_SLAM2)
SET(CMAKE_EXPORT_COMPILE_COMMANDS "ON")
IF(NOT CMAKE_BUILD_TYPE)
SET(CMAKE_BUILD_TYPE Release)
ENDIF()
MESSAGE("Build type: " ${CMAKE_BUILD_TYPE})
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3 ")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3 ")
# Check C++11 or C++0x support
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX11)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
add_definitions(-DCOMPILEDWITHC11)
message(STATUS "Using flag -std=c++11.")
elseif(COMPILER_SUPPORTS_CXX0X)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
add_definitions(-DCOMPILEDWITHC0X)
message(STATUS "Using flag -std=c++0x.")
else()
message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++11 support. Please use a different C++ compiler.")
endif()
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules)
find_package(OpenCV 4.0 QUIET)
if(NOT OpenCV_FOUND)
find_package(OpenCV 2.4.3 QUIET)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 4.2 not found.")
endif()
endif()
set( CMAKE_CXX_STANDARD 14)
find_package(Eigen3 3.1.0 REQUIRED)
find_package(Pangolin REQUIRED)
# adding for point cloud viewer and mapper
find_package( PCL 1.1 REQUIRED )
include_directories(
${PROJECT_SOURCE_DIR}
${PROJECT_SOURCE_DIR}/include
${EIGEN3_INCLUDE_DIR}
${Pangolin_INCLUDE_DIRS}
${PCL_INCLUDE_DIRS}
)
add_definitions( ${PCL_DEFINITIONS} )
link_directories( ${PCL_LIBRARY_DIRS} )
set(CMAKE_LIBRARY_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/lib)
add_library(${PROJECT_NAME} SHARED
src/System.cc
src/Tracking.cc
src/LocalMapping.cc
src/LoopClosing.cc
src/ORBextractor.cc
src/ORBmatcher.cc
src/FrameDrawer.cc
src/Converter.cc
src/MapPoint.cc
src/KeyFrame.cc
src/Map.cc
src/MapDrawer.cc
src/Optimizer.cc
src/PnPsolver.cc
src/Frame.cc
src/KeyFrameDatabase.cc
src/Sim3Solver.cc
src/Initializer.cc
src/Viewer.cc
src/pointcloudmapping.cc
)
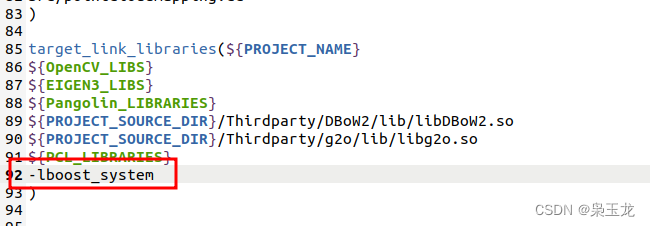
target_link_libraries(${PROJECT_NAME}
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/Thirdparty/g2o/lib/libg2o.so
${PCL_LIBRARIES}
-lboost_system
)
add_definitions(-DBOOST_ERROR_CODE_HEADER_ONLY)
add_definitions(-DBOOST_SYSTEM_NO_DEPRECATED)
set(Boost_NO_BOOST_CMAKE ON)
set(BOOST_ROOT "/usr/include")
# Build examples
set(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
add_executable(rgbd_tum
Examples/RGB-D/rgbd_tum.cc)
target_link_libraries(rgbd_tum ${PROJECT_NAME})
add_executable(rgbd_my
Examples/RGB-D/rgbd_my.cc)
target_link_libraries(rgbd_my ${PROJECT_NAME})
add_executable(stereo_kitti
Examples/Stereo/stereo_kitti.cc)
target_link_libraries(stereo_kitti ${PROJECT_NAME})
add_executable(stereo_euroc
Examples/Stereo/stereo_euroc.cc)
target_link_libraries(stereo_euroc ${PROJECT_NAME})
add_executable(mono_tum
Examples/Monocular/mono_tum.cc)
target_link_libraries(mono_tum ${PROJECT_NAME})
add_executable(mono_kitti
Examples/Monocular/mono_kitti.cc)
target_link_libraries(mono_kitti ${PROJECT_NAME})
add_executable(mono_euroc
Examples/Monocular/mono_euroc.cc)
target_link_libraries(mono_euroc ${PROJECT_NAME})
# Build tools
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/tools)
add_executable(bin_vocabulary
tools/bin_vocabulary.cc)
target_link_libraries(bin_vocabulary ${PROJECT_NAME})
在对CMakeLists.txt增添,-lboost_system要就修改自己的环境中的opencv和pcl版本号
-lboost_system
如果报:
tools/bin_vocabulary: error while loading shared libraries: libopencv_core3.so.3.1: cannot open shared object file: No such file or directory
在CMakeLists.txt添加
find_package(OpenCV 4 QUIET)
if(NOT OpenCV_FOUND)
find_package(OpenCV 4 QUIET)
if(NOT OpenCV_FOUND)
set(OpenCV_DIR /home/ubicast/Anzhuang/opencv4 to opencv/build)
find_package(OpenCV QUIET)
endif()
endif()
编译完成后进数据准备
可以将上一轮步骤下载的rgbd_dataset_freiburg1_xyz文件复制粘贴到/home/heying/ORB_SLAM2_modified/Examples/datasets中
在使用数据之前,需要对 ``rgbd_dataset_freiburg1_xyz中的 RGB 文件和 Depth 文件进行匹配。TUM 数据官网 提供了匹配的程序 associate.py```,这个也是上一轮下载的py文件
https://svncvpr.in.tum.de/cvpr-ros-pkg/trunk/rgbd_benchmark/rgbd_benchmark_tools/src/rgbd_benchmark_tools/associate.py
将python文件保存到rgbd_dataset_freiburg1_xyz文件夹内,然后运行
python associate.py rgb.txt depth.txt > association.txt
进行测试数据
./bin/rgbd_tum Vocabulary/ORBvoc.bin Examples/RGB-D/TUM1.yaml Examples/datasets/rgbd_dataset_freiburg1_xyz Examples/datasets/rgbd_dataset_freiburg1_xyz/association.txt
报错:段错误 (核心已转储)
Start processing sequence ...
Images in the sequence: 792
New map created with 834 points
receive a keyframe, id = 1
段错误 (核心已转储)
解决方案:
删除掉ORB_SLAM2_modified的cmakelists.txt中的 -march=native 以及 g2o 的cmakelists中的-march=native
报错,找不到libpcl_visualization.so文件因为自定安装的
方法一:将下面添加到:cmakelists.txt文件中
add_definitions(-DBOOST_ERROR_CODE_HEADER_ONLY)
add_definitions(-DBOOST_SYSTEM_NO_DEPRECATED)
set(Boost_NO_BOOST_CMAKE ON)
set(BOOST_ROOT "/usr/include")
方法二:暴力复制,把报错的都拷贝到/usr/lib/x86_64-linux-gnu/文件中(不建议使用)
sudo cp -r /usr/include/boost165/lib/libboost_filesystem.so.1.65.1 /usr/lib/x86_64-linux-gnu/
sudo cp -r /usr/include/boost165/lib/libboost_filesystem.so /usr/lib/x86_64-linux-gnu/
sudo cp -r /usr/include/boost165/lib/libboost_thread.so /usr/lib/x86_64-linux-gnu/
sudo cp -r /usr/include/boost165/lib/libboost_thread.so.1.65.1 /usr/lib/x86_64-linux-gnu/
sudo cp -r /usr/include/boost165/lib/libboost_system.so /usr/lib/x86_64-linux-gnu/
sudo cp -r /usr/include/boost165/lib/libboost_system.so.1.65.1 /usr/lib/x86_64-linux-gnu/
sudo cp -r /usr/include/boost165/lib/libboost_iostreams.so /usr/lib/x86_64-linux-gnu/
sudo cp -r /usr/include/boost165/lib/libboost_iostreams.so.1.65.1 /usr/lib/x86_64-linux-gnu/
修改变成彩色点云图
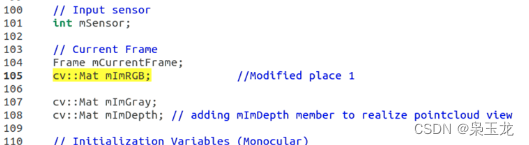
1:首先修改文件~/ORB_SLAM2_modified/include/Tracking.h,在105行添加
// Current Frame
Frame mCurrentFrame;
cv::Mat mImRGB; //Modified place 1
2:修改:ORB_SLAM2_modified/src/Tracking.cc,在210行添加
cv::Mat Tracking::GrabImageRGBD(const cv::Mat &imRGB,const cv::Mat &imD, const double ×tamp)
{
mImRGB = imRGB; //Modified place 1
mImGray = imRGB;
mImDepth = imD;
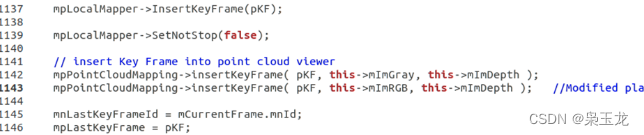
第二处在1141在进行添加
// insert Key Frame into point cloud viewer
mpPointCloudMapping->insertKeyFrame( pKF, this->mImGray, this->mImDepth );
mpPointCloudMapping->insertKeyFrame( pKF, this->mImRGB, this->mImDepth ); //Modified place 2
在进行编译
build.sh
在ROS形式运行
ROS模式
如果要以 ROS 的形式运行,还需要对下载回的文件中的 ROS 文件进行编译。这里也要做一些额外设置
首先设置一下环境变量,也和之前的一样
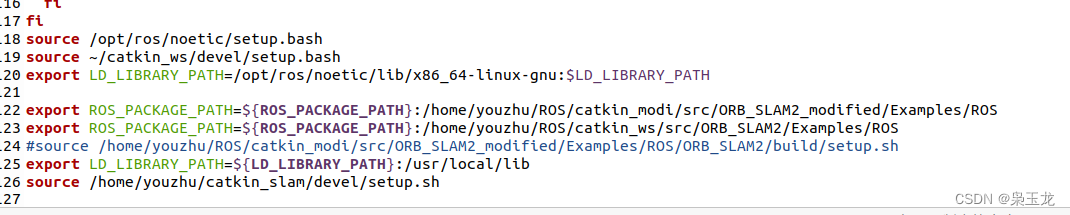
将ROS 所在目录加入 ROS_PACKAGE_PATH 环境变量中
打开位于主目录的.bashrc文件,进行修改
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/ORB_SLAM2_modified/Examples/ROS
我们需要做的就是参照~/ORB_SLAM2_modified/CMakeLists.txt 文件,把 PCL 相关的设置添加到 ~/ORB_SLAM2_modified/Examples/ROS/ORB_SLAM2/CMakeLists.txt文件中。
将这个文件打开,进行以下修改
cmake_minimum_required(VERSION 2.4.6)
include($ENV{ROS_ROOT}/core/rosbuild/rosbuild.cmake)
# for Youcompleteme surpport
set( CMAKE_EXPORT_COMPILE_COMMANDS "ON" )
rosbuild_init()
IF(NOT ROS_BUILD_TYPE)
SET(ROS_BUILD_TYPE Release)
ENDIF()
MESSAGE("Build type: " ${ROS_BUILD_TYPE})
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3 -march=native ")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3 -march=native")
# Check C++11 or C++0x support
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++14" COMPILER_SUPPORTS_CXX14)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX14)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++14")
add_definitions(-DCOMPILEDWITHC14)
message(STATUS "Using flag -std=c++14.")
elseif(COMPILER_SUPPORTS_CXX0X)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
add_definitions(-DCOMPILEDWITHC0X)
message(STATUS "Using flag -std=c++0x.")
else()
message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++14 support. Please use a different C++ compiler.")
endif()
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/../../../cmake_modules)
find_package(OpenCV 4.0 QUIET)
if(NOT OpenCV_FOUND)
find_package(OpenCV 2.4.3 QUIET)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 4.2 not found.")
endif()
endif()
find_package(Eigen3 3.1.0 REQUIRED)
find_package(Pangolin REQUIRED)
find_package( PCL 1.1 REQUIRED ) ####### 修改1
include_directories(
${PROJECT_SOURCE_DIR}
${PROJECT_SOURCE_DIR}/../../../
${PROJECT_SOURCE_DIR}/../../../include
${Pangolin_INCLUDE_DIRS}
${PCL_INCLUDE_DIRS} ####### 修改2
)
add_definitions( ${PCL_DEFINITIONS} ) ####### 修改3
link_directories( ${PCL_LIBRARY_DIRS} ) ####### 修改4
set(LIBS
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/../../../Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/../../../Thirdparty/g2o/lib/libg2o.so
${PROJECT_SOURCE_DIR}/../../../lib/libORB_SLAM2.so
${PCL_LIBRARIES} ####### 修改5
)
#增添doost
add_definitions(-DBOOST_ERROR_CODE_HEADER_ONLY)
add_definitions(-DBOOST_SYSTEM_NO_DEPRECATED)
set(Boost_NO_BOOST_CMAKE ON)
set(BOOST_ROOT "/usr/include")
# Node for monocular camera
rosbuild_add_executable(Mono
src/ros_mono.cc
)
target_link_libraries(Mono
${LIBS}
)
# Node for monocular camera (Augmented Reality Demo)
rosbuild_add_executable(MonoAR
src/AR/ros_mono_ar.cc
src/AR/ViewerAR.h
src/AR/ViewerAR.cc
)
target_link_libraries(MonoAR
${LIBS}
)
# Node for stereo camera
rosbuild_add_executable(Stereo
src/ros_stereo.cc
)
target_link_libraries(Stereo
${LIBS}
)
# Node for RGB-D camera
rosbuild_add_executable(RGBD
src/ros_rgbd.cc
)
target_link_libraries(RGBD
${LIBS}
)
做完以上修改之后,再删掉 ~/ORB_SLAM2_modified/Examples/ROS/ORB_SLAM2/build文件夹
然后运行 build_ros.sh 编译 ROS 文件
.build_ros.sh
将复制了TUM1.yaml文件,命名为 TUM1_ROS.yaml,修改其中的参数 DepthMapFactor: 1.0
ROS模式测试
修改之后,运行以下命令进行测试
roscore
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.bin Examples/RGB-D/TUM1_ROS.yaml
播放bag包,不过需要对播放出来的数据话题做转换
rosbag play --pause Examples/datasets/rgbd_dataset_freiburg1_xyz.bag /camera/rgb/image_color:=/camera/rgb/image_raw /camera/depth/image:=/camera/depth_registered/image_raw
地图保存
参考文件
PCL:读取指定路径下的pcd点云 | 将点云保存至指定路径
问题这些只能实时查看点云地图,不能保存。我们可以稍微修改一下文件
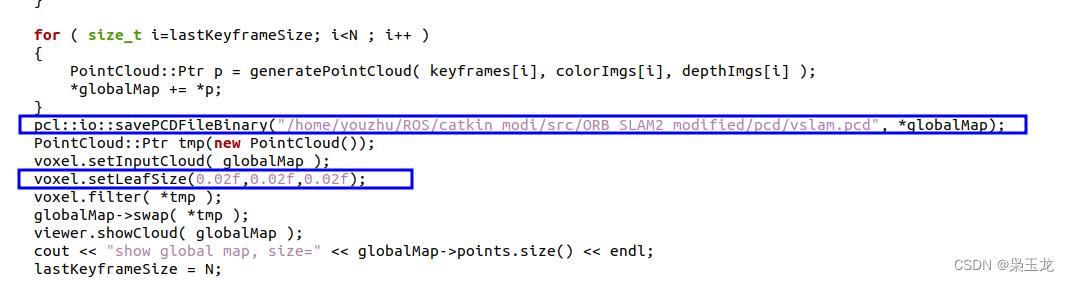
~/ORB_SLAM2_modified/src/pointcloudmapping.cc,在其中调用 PCL 库的 pcl::io::savePCDFileBinary函数就可以保存点云地图了。
首先打开文件
gedit src/pointcloudmapping.cc
进行修改
//添加头文件
#include <pcl/io/pcd_io.h>
添加保存地址:
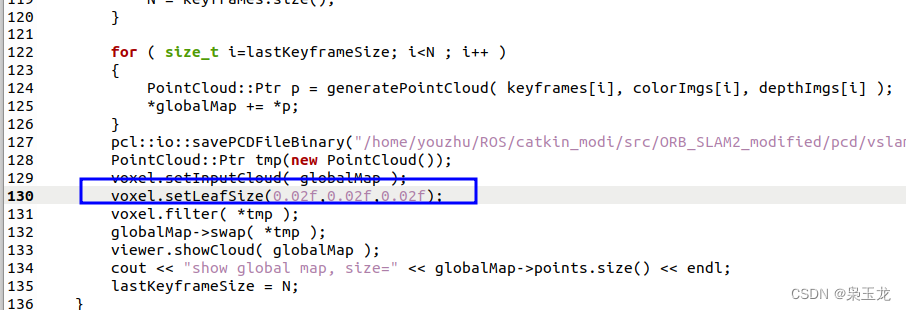
pcl::io::savePCDFileBinary("/home/heying/ORB_SLAM2_modified/pcd/vslam.pcd", *globalMap);
添加点云密度地图
voxel.setLeafSize(0.02f,0.02f,0.02f);
完成后保存并退出,然后进行编译
cd build/
make -j4
然后再运行前述的各个 SLAM 命令就可以在 ~/ORB_SLAM2_modified/pcd路径下产生一个名为 vslam.pcd 的点云文件。roscore
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.bin Examples/RGB-D/TUM1_ROS.yaml
rosbag play --pause Examples/datasets/rgbd_dataset_freiburg1_xyz.bag /camera/rgb/image_color:=/camera/rgb/image_raw /camera/depth/image:=/camera/depth_registered/image_raw
在home/heying/ORB_SLAM2_modified/pcd生成pcd文件
为了查看这个 pcd 文件,我们需要安装相应的工具
sudo apt-get install pcl-tools
完成后通过 pcl_viewer 查看 vslam.pcd
pcl_viewer vslam.pcd
使用D435i生成点云地图
在启动相机之前,我们需要设置一下 realsense2_camera rospack 中的 rs_camera.launch 的文件
将下面设在为:true
完成后,就可以用如下命令启动相机
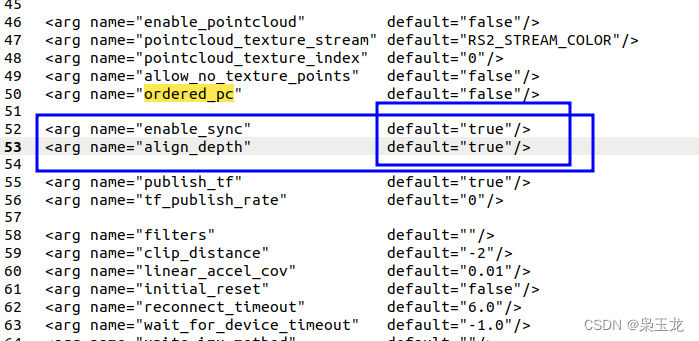
roslaunch realsense2_camera rs_camera.launch
其中关键的是 /camera/color/image_raw 和/camera/aligned_depth_to_color/image_raw
分别对应 RGB 图像和深度图像
在ORB_SLAM2_modified/Examples/RGB-D创建MyD435i.yaml
我的相机参数
%YAML:1.0
#--------------------------------------------------------------------------------------------
# Camera Parameters. Adjust them!
#--------------------------------------------------------------------------------------------
# Camera calibration and distortion parameters (OpenCV)
Camera.fx: 905.8228759765625
Camera.fy: 905.6454467773438
Camera.cx: 640.6072998046875
Camera.cy: 364.5034484863281
Camera.k1: 0.0
Camera.k2: 0.0
Camera.p1: 0.0
Camera.p2: 0.0
Camera.p3: 0.0
Camera.width: 720
Camera.height: 1280
# Camera frames per second
Camera.fps: 30.0
# IR projector baseline times fx (aprox.)
# bf = baseline (in meters) * fx, D435i的 baseline = 50 mm
Camera.bf: 50.0
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1
# Close/Far threshold. Baseline times.
ThDepth: 40.0
# Deptmap values factor
DepthMapFactor: 1000.0
#--------------------------------------------------------------------------------------------
# ORB Parameters
#--------------------------------------------------------------------------------------------
# ORB Extractor: Number of features per image
ORBextractor.nFeatures: 1000
# ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.scaleFactor: 1.2
# ORB Extractor: Number of levels in the scale pyramid
ORBextractor.nLevels: 8
# ORB Extractor: Fast threshold
# Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
# Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
# You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
#--------------------------------------------------------------------------------------------
# Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1
Viewer.GraphLineWidth: 0.9
Viewer.PointSize:2
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500
PointCloudMapping.Resolution: 0.01
meank: 50
thresh: 2.0
1:然后修改src/pointcloudmapping.cc文件
voxel.setLeafSize (0.02f, 0.02f, 0.02f); //Modified place 1 调节点云密度
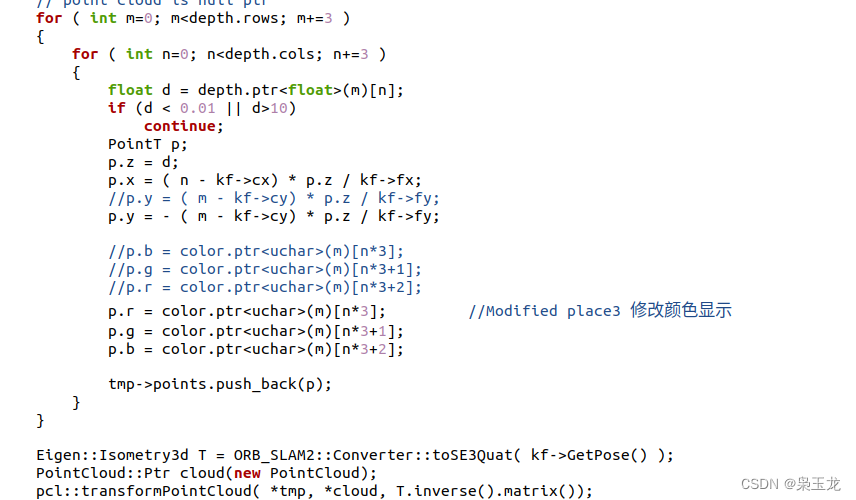
2:修改
p.x = ( n - kf->cx) * p.z / kf->fx;
//p.y = ( m - kf->cy) * p.z / kf->fy;
p.y = - ( m - kf->cy) * p.z / kf->fy;
//p.b = color.ptr<uchar>(m)[n*3];
//p.g = color.ptr<uchar>(m)[n*3+1];
//p.r = color.ptr<uchar>(m)[n*3+2];
p.r = color.ptr<uchar>(m)[n*3]; //Modified place3 修改颜色显示
p.g = color.ptr<uchar>(m)[n*3+1];
p.b = color.ptr<uchar>(m)[n*3+2];
然后编译ORB_SLAM2_modified
./build.sh
./build_ros.sh
完成编译后进行测试
启动主节点
roscore
启动摄像头
roslaunch realsense2_camera rs_camera.launch
进行建图
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.bin Examples/RGB-D/RealSense.yaml /camera/rgb/image_raw:=/camera/color/image_raw /camera/depth_registered/image_raw:=/camera/aligned_depth_to_color/image_raw
当CTRL+C后,可以看到输出的pcd文件
查看保存的pcd文件
pcl_viewer vslam.pcd
使用优化指令
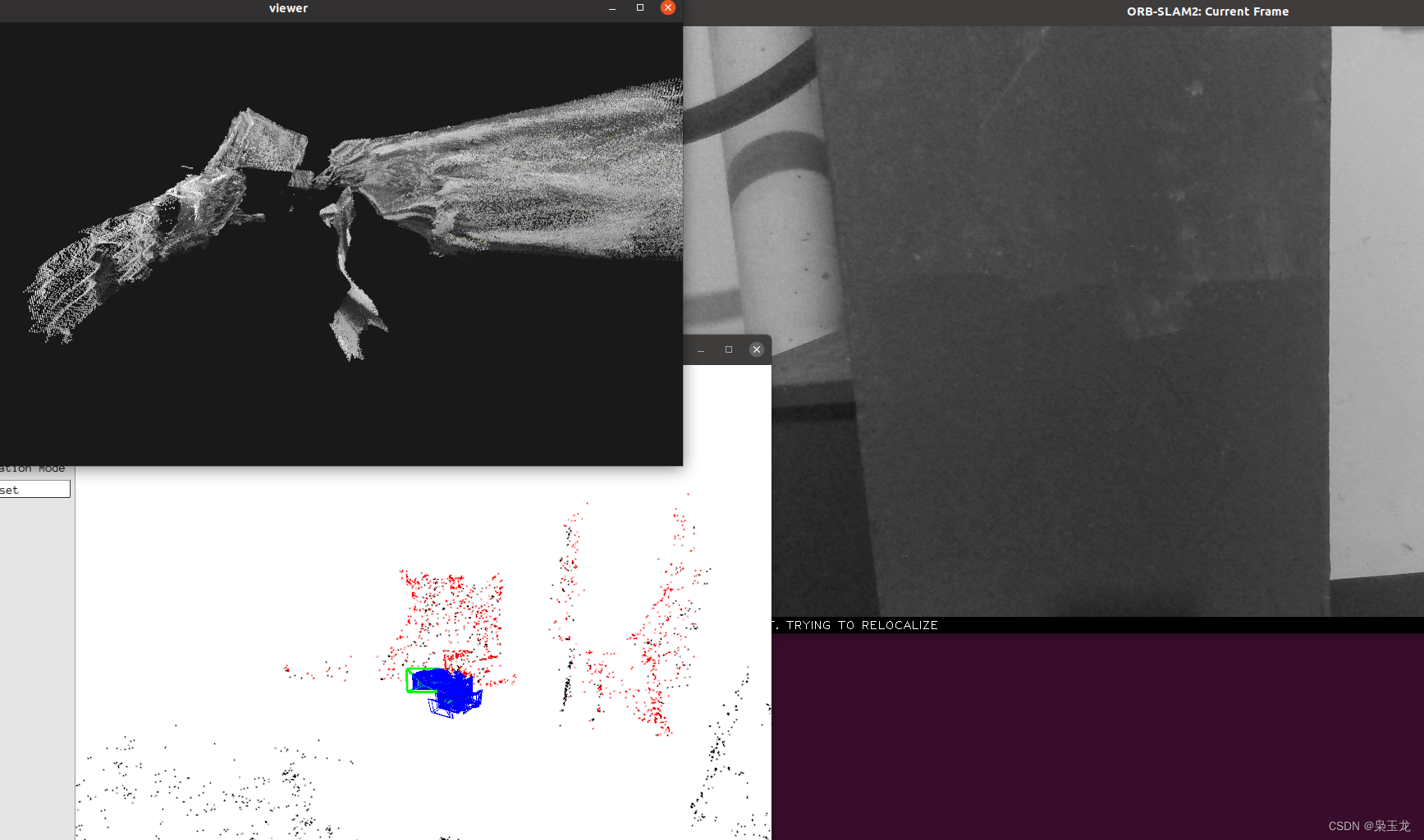
测试:rosrun ORB_SLAM2 RGBD
如果报错
解决添加软链接:
sudo ln -s /home/youzhu/ROS/catkin_modi/src/ORB_SLAM2_modified/Examples/ROS/ORB_SLAM2 /opt/ros/noetic/share/ORB_SLAM2
首先建立一个功能包,命名为 slam
cd ~/catkin_slam/
catkin_make clean
cd src
catkin_create_pkg slam std_msgs rospy roscpp
增添环境
source /home/youzhu/catkin_slam/devel/setup.sh
然后在这个功能包中创建launch文件,我命名为rgbd.launch
touch rgbd.launch
进行编辑
<launch>
<!--定义全局参数-->
<arg name="rgb_image" default="/camera/rgb/image_raw"/>
<arg name="path_to_vacabulary" default="/home/youzhu/ROS/catkin_modi/src/ORB_SLAM2_modified/Vocabulary/ORBvoc.bin"/>
<arg name="path_to_settings" default="/home/youzhu/ROS/catkin_modi/src/ORB_SLAM2_modified/Examples/RGB-D/TUM1_ROS.yaml"/>
<!--播放离线包-->
<!-- 注意这里bag文件的路径必须为绝对路径-->
<node pkg="rosbag" type="play" name="player" output="screen"
args=" /home/youzhu/ROS/catkin_modi/src/ORB_SLAM2_modified/Examples/datasets/rgbd_dataset_freiburg1_xyz.bag">
<remap from="/camera/rgb/image_color" to="/camera/rgb/image_raw" />
<remap from="/camera/depth/image" to="/camera/depth_registered/image_raw" />
</node>
<!--启动ORB-SLAM2 RGBD-->
<node name ="RGBD" pkg="ORB_SLAM2" type="RGBD"
args="$(arg path_to_vacabulary) $(arg path_to_settings)" respawn="true" output="screen">
<!--remap from="/camera/image_raw" to="$(arg rgb_image)"/-->
</node>
</launch>
完成后测试

roslaunch slam rgbd.launch
实时摄像头
再新建一个launch文件,用于摄像头的启动于建图
touch camera.launch
gedit camera.launch
编辑:camera.launch
<launch>
<!--定义全局参数-->
<arg name = "path_to_vocabulary" default = "/home/youzhu/ROS/catkin_modi/src/ORB_SLAM2_modified/Vocabulary/ORBvoc.bin"/>
<arg name = "path_to_settings" default = "/home/youzhu/ROS/catkin_modi/src/ORB_SLAM2_modified/Examples/RGB-D/MyD435i.yaml"/>
<!--include file="$(find realsense2_camera)/launch/rs_camera.launch"/-->
<!--启动ORB-SLAM2 RGBD-->
<node pkg = "ORB_SLAM2" type ="RGBD" name = "RGBD_camera" args="$(arg path_to_vocabulary) $(arg path_to_settings)" respawn="true" output="screen">
<remap from="/camera/rgb/image_raw" to="/camera/color/image_raw" />
<remap from="/camera/depth_registered/image_raw" to="/camera/aligned_depth_to_color/image_raw" />
</node>
</launch>
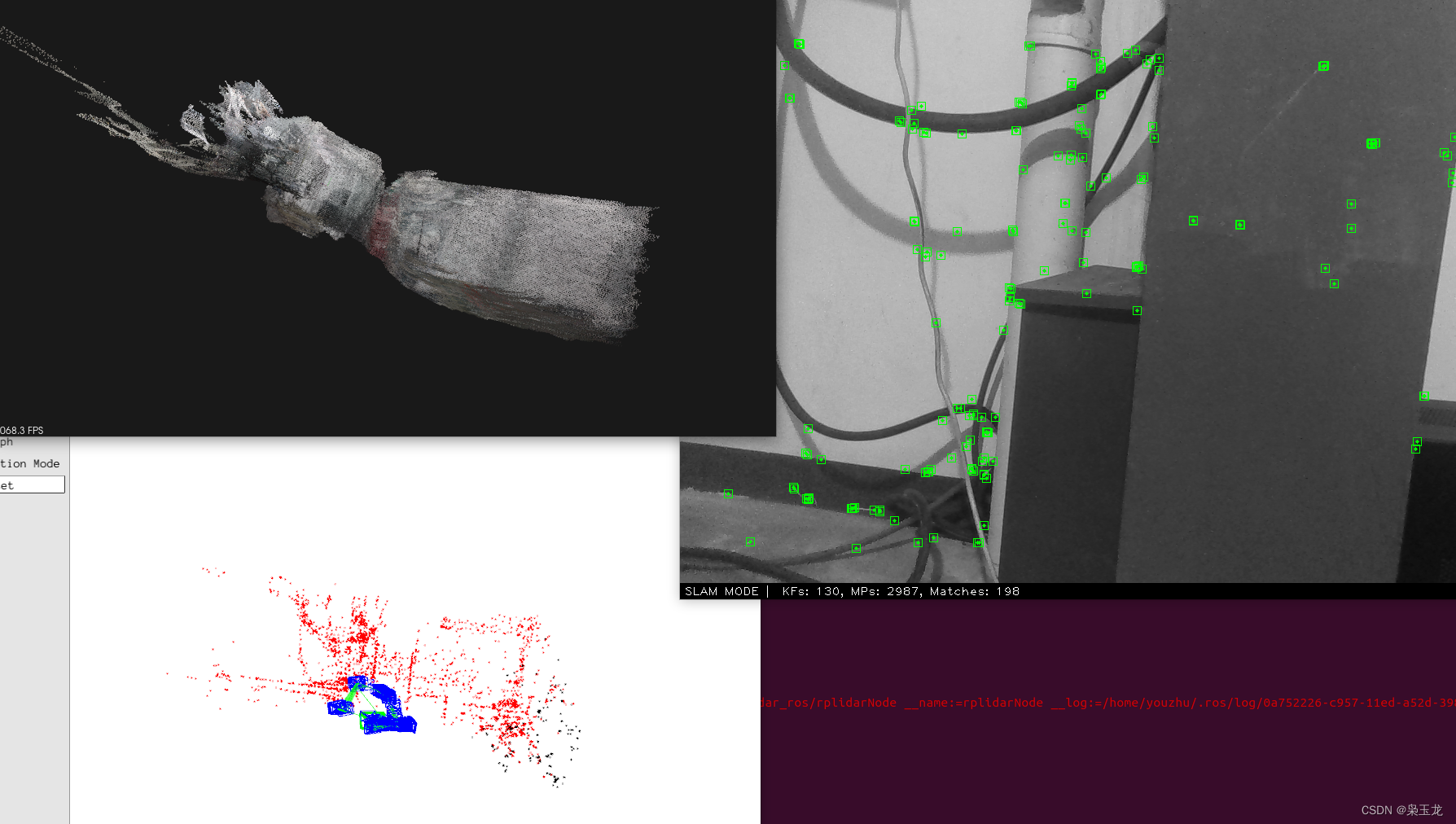
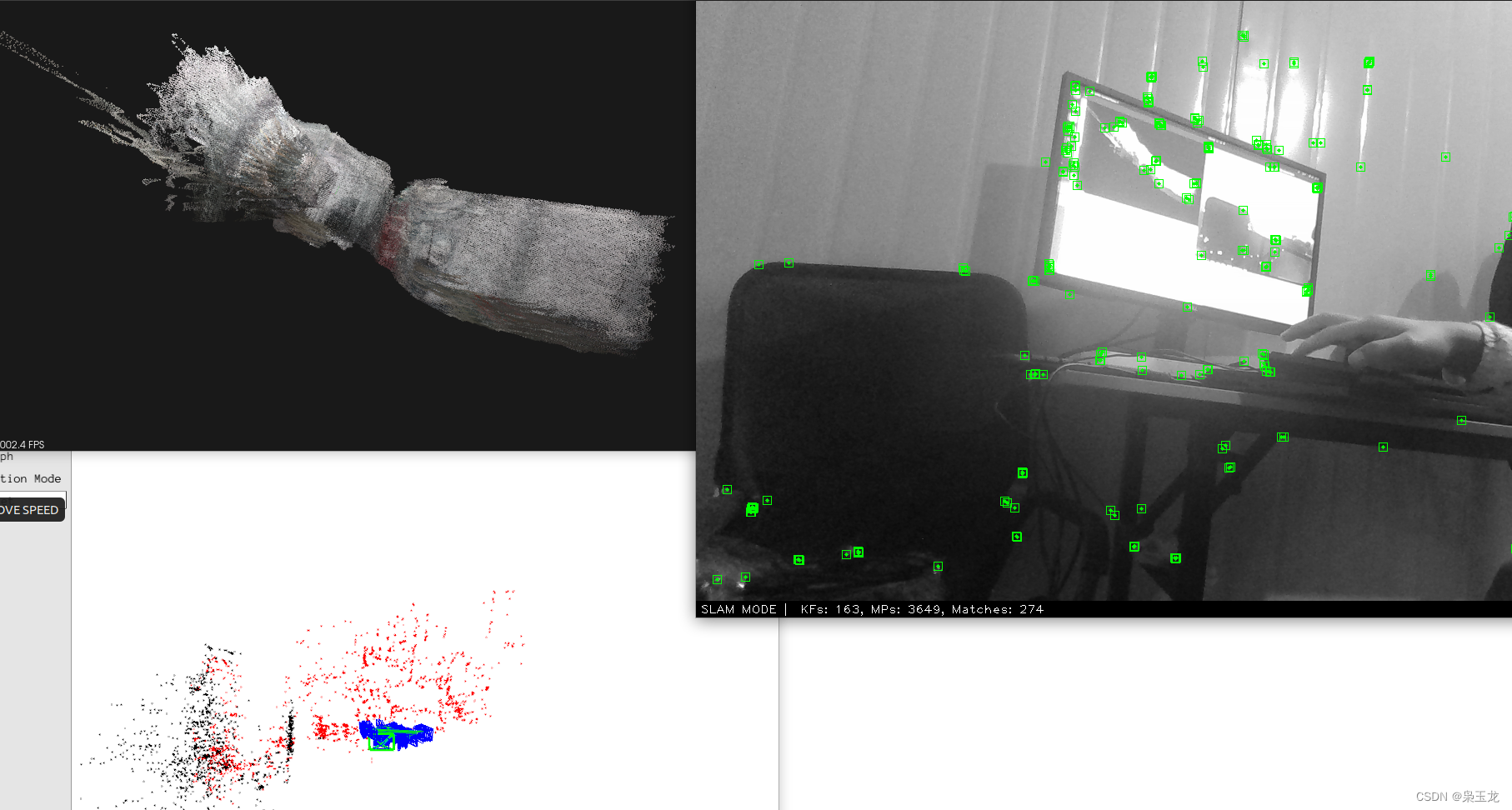
测试
开启主节点
roscore
然后检查摄像头的硬件连接
启动摄像头
roslaunch realsense2_camera rs_camera.launch
启动建图
roslaunch slam camera.launch
在程序CTRL+C后会生成pcd文件
查看效果
pcl_viewer vslam.pcd