一、PID算法介绍
PID算法,即比例-积分-微分控制算法,是一种广泛应用的控制策略。在自动控制系统中,PID控制器根据系统的输入(设定值)和输出(实际值)之间的偏差,通过比例、积分和微分三种运算方式,产生适当的控制信号,从而实现对被控对象的精确控制。
一、PID算法的基本原理
PID算法的核心思想是根据偏差的比例(P)、积分(I)和微分(D)来计算控制量。这三种运算方式在控制过程中起到了不同的作用:
- 比例控制(P):根据偏差的大小直接调整控制量,偏差越大,控制量调整幅度越大。比例控制能够迅速响应偏差的变化,但可能导致系统振荡。
- 积分控制(I):对偏差进行积分运算,以消除系统中的稳态误差。积分控制能够逐渐减小偏差,使系统趋于稳定,但可能导致系统响应速度变慢。
- 微分控制(D):根据偏差的变化率来调整控制量,具有预测偏差趋势的能力。微分控制能够提前调整控制量,以抑制系统振荡,提高系统的稳定性。
二、PID算法的应用场景
PID算法因其简单、实用、鲁棒性强的特点,在各个领域得到了广泛应用。以下是一些典型的应用场景:
- 工业自动化:PID控制器在工业自动化领域中具有重要地位,如温度控制、压力控制、流量控制等。
- 机器人控制:PID算法可用于机器人的运动控制,如轨迹跟踪、姿态调整等。
- 航空航天:PID控制器在航空航天领域也发挥着重要作用,如飞机姿态控制、卫星轨道控制等。
三、PID算法的优缺点
PID算法的优点主要体现在以下几个方面:
- 原理简单:PID算法基于基本的数学运算,易于理解和实现。
- 适应性强:PID算法能够适应各种非线性、时变和不确定性系统,具有较强的鲁棒性。
- 控制效果好:通过合理调整PID参数,可以实现较高的控制精度和稳定性。
然而,PID算法也存在一些缺点:
- 参数调整困难:PID算法的参数(比例系数、积分系数、微分系数)需要根据具体系统进行调整,调整过程可能较为繁琐。
- 可能存在超调现象:在某些情况下,PID控制器可能导致系统超调,即控制量过大或过小,影响系统稳定性。
四、基本原理及代码实现
通过红外对射及码盘的联合搭配测得实际速度,再设定目标速度,pid算法根据目标速度及实际速度进行调控。
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"
#include "mortpwm.h"
#include "Motor.h"
#include "usart.h"
#include "Timer.h"
float num;
extern int CountSensor_Count;
float speed;
// PID控制器结构体
typedef struct {
float Kp; // 比例系数
float Ki; // 积分系数
float Kd; // 微分系数
float SetPoint; // 目标值
float ProcessVariable; // 过程变量(当前速度)
float ErrorSum; // 误差和
float LastError; // 上一次误差
float Output; // PID输出
} PIDController;
// 初始化PID控制器的函数
void PID_Init(PIDController *pid, float kp, float ki, float kd, float setPoint) {
pid->Kp = kp; // 设置比例系数
pid->Ki = ki; // 设置积分系数
pid->Kd = kd; // 设置微分系数
pid->SetPoint = setPoint; // 设置目标值
pid->ProcessVariable = 0.0f; // 初始化过程变量
pid->ErrorSum = 0.0f; // 初始化误差累积和
pid->LastError = 0.0f; // 初始化上一次误差
pid->Output = 0.0f; // 初始化输出值
}
// 计算PID控制器输出的函数
float PID_Calculate(PIDController *pid, float processVariable) {
float error = pid->SetPoint - processVariable; // 计算当前误差
pid->ErrorSum += error; // 更新误差累积和
float derivative = error - pid->LastError; // 计算误差的微分
pid->Output = pid->Kp * error // 比例项
+ pid->Ki * pid->ErrorSum // 积分项
+ pid->Kd * derivative; // 微分项
pid->LastError = error; // 更新上一次误差
pid->ProcessVariable = processVariable; // 更新过程变量
return pid->Output; // 返回PID输出值
}
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
CountSensor_Init(); //计数传感器初始化
Motor_Init();
mortpwm_Init();
Timer_Init();
uart_init(9600);
/*显示静态字符串*/
OLED_ShowString(1, 1, "Count:"); //1行1列显示字符串Count:
static PIDController speedPID; // 定义并初始化PID控制器
static int initialized = 0; // 用于判断PID是否已初始化
while (1)
{
if (!initialized) {
PID_Init(&speedPID, 0.2f, 0.01f, 0.001f, 2.5f); // 初始化PID,目标速度为2.5
initialized = 1;
}
// 计算PID输出
float pwmValue = PID_Calculate(&speedPID, speed);
OLED_ShowNum(1, 7, CountSensor_Get(), 5); //OLED不断刷新显示CountSensor_Get的返回值
// 设置电机PWM值
// printf("%.3f\r\n",pwmValue);
Goahead(pwmValue*10);
}
}
/**
* 函 数:TIM3中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void TIM3_IRQHandler(void)
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) == SET) //判断是否是TIM2的更新事件触发的中断
{
num=CountSensor_Get(); //Num变量获取20孔码盘所经过的孔数
speed=num/20.000; //每秒获取到的num数除以20为圈数,speed为每秒多少圈
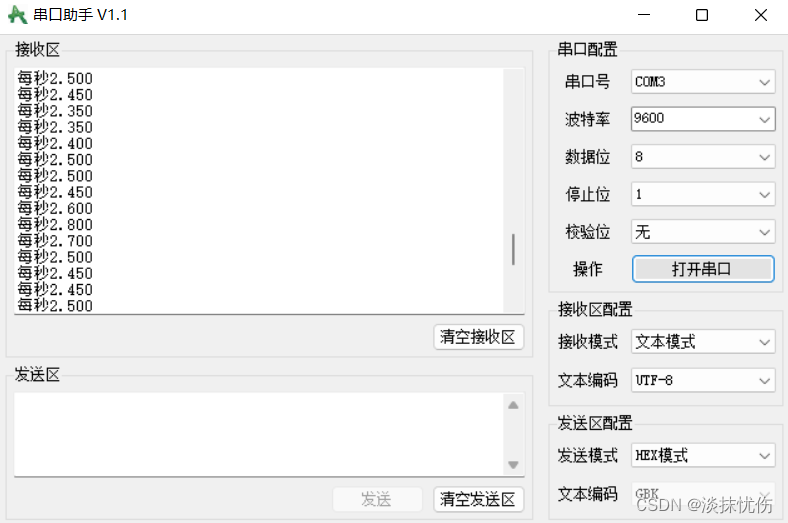
printf("每秒%.3f\r\n",speed);//串口打印输出速度
CountSensor_Count=0;
TIM_ClearITPendingBit(TIM3, TIM_IT_Update); //清除TIM2更新事件的中断标志位
//中断标志位必须清除
//否则中断将连续不断地触发,导致主程序卡死
}
}
电机pwm控制转速
mortpwm.c
#include "stm32f10x.h" // Device header
#include "stm32f10x_tim.h"
#include "mortpwm.h"
void mortpwm_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);//用来打开AFIO外设的时钟。AFIO外设用于控制引脚重映射功能。引脚重映射功能允许将某些外设的引脚映射到其他引脚上,以便更灵活地配置引脚功能。
// GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE);//将TIM2定时器的引脚部分重映射到其他引脚上
// GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);//禁用JTAG调试接口。在某些情况下,需要释放JTAG接口的引脚以供其他功能使用,这时就需要禁用JTAG调试接口。
GPIO_InitTypeDef GPIO_InitStructure; // 定义一个GPIO_InitTypeDef类型的变量GPIO_InitStructure
//GPIO_InitTypeDef GPIO_InitStructure2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 设置GPIO_InitStructure的GPIO模式为复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1; // 设置GPIO_InitStructure的引脚为GPIOA的第0号引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 设置GPIO_InitStructure的输出速度为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化GPIOA的引脚配置为GPIO_InitStructure所定义的配置
//GPIO_InitStructure2.GPIO_Mode = GPIO_Mode_AF_PP; // 设置GPIO_InitStructure的GPIO模式为复用推挽输出
//GPIO_InitStructure2.GPIO_Pin = GPIO_Pin_6; // 设置GPIO_InitStructure的引脚为GPIOA的第0号引脚
//GPIO_InitStructure2.GPIO_Speed = GPIO_Speed_50MHz; // 设置GPIO_InitStructure的输出速度为50MHz
//GPIO_Init(GPIOA, &GPIO_InitStructure2); // 初始化GPIOA的引脚配置为GPIO_InitStructure所定义的配置
TIM_InternalClockConfig(TIM2); // 配置TIM2的内部时钟
//TIM_InternalClockConfig(TIM3); // 配置TIM2的内部时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; // 定义一个TIM_TimeBaseInitTypeDef类型的变量TIM_TimeBaseInitStructure
//TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure2;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 设置时钟分频为不分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; // 设置计数模式为向上计数
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; // 设置周期为100-1,即ARR寄存器的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; // 设置预分频器的值为720-1,即PSC寄存器的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; // 设置重复计数器的值为0
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); // 初始化TIM2的时间基础设置为TIM_TimeBaseInitStructure所定义的配置
//TIM_TimeBaseInitStructure2.TIM_ClockDivision = TIM_CKD_DIV1; // 设置时钟分频为不分频
//TIM_TimeBaseInitStructure2.TIM_CounterMode = TIM_CounterMode_Up; // 设置计数模式为向上计数
//TIM_TimeBaseInitStructure2.TIM_Period = 100 - 1; // 设置周期为100-1,即ARR寄存器的值
//TIM_TimeBaseInitStructure2.TIM_Prescaler = 720 - 1; // 设置预分频器的值为720-1,即PSC寄存器的值
//TIM_TimeBaseInitStructure2.TIM_RepetitionCounter = 0; // 设置重复计数器的值为0
//TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure2); // 初始化TIM2的时间基础设置为TIM_TimeBaseInitStructure所定义的配置
TIM_OCInitTypeDef TIM_OCInitStructure; // 定义一个TIM_OCInitTypeDef类型的变量TIM_OCInitStructure
TIM_OCStructInit(&TIM_OCInitStructure); // 初始化TIM_OCInitStructure为默认值
//TIM_OCInitTypeDef TIM_OCInitStructure2; // 定义一个TIM_OCInitTypeDef类型的变量TIM_OCInitStructure
//TIM_OCStructInit(&TIM_OCInitStructure2); // 初始化TIM_OCInitStructure为默认值
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 设置输出比较模式为PWM模式1
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // 设置输出极性为高电平有效
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 启用输出
TIM_OCInitStructure.TIM_Pulse = 0; // 设置脉冲值为0,即CCR寄存器的值,值越大,LED越暗
TIM_OC1Init(TIM2, &TIM_OCInitStructure); // 初始化TIM2的输出比较通道1为TIM_OCInitStructure所定义的配置
TIM_OC2Init(TIM2, &TIM_OCInitStructure); // 初始化TIM2的输出比较通道1为TIM_OCInitStructure所定义的配置
TIM_Cmd(TIM2, ENABLE); // 使能TIM2定时器
//TIM_OCInitStructure2.TIM_OCMode = TIM_OCMode_PWM1; // 设置输出比较模式为PWM模式1
//TIM_OCInitStructure2.TIM_OCPolarity = TIM_OCPolarity_High; // 设置输出极性为高电平有效
//TIM_OCInitStructure2.TIM_OutputState = TIM_OutputState_Enable; // 启用输出
//TIM_OCInitStructure2.TIM_Pulse = 0; // 设置脉冲值为0,即CCR寄存器的值,值越大,LED越暗
//TIM_OC1Init(TIM3, &TIM_OCInitStructure2); // 初始化TIM2的输出比较通道1为TIM_OCInitStructure所定义的配置
//TIM_Cmd(TIM3, ENABLE); // 使能TIM2定时器
}
void MORT_SetCompare1(uint16_t Compare) //设置通道1的ccr的值
{
TIM_SetCompare1(TIM2, Compare);
}
void MORT_SetCompare2(uint16_t Compare) //设置通道1的ccr的值
{
TIM_SetCompare2(TIM2, Compare);
}
mortpwm.h
#ifndef __TIMER_H
#define __TIMER_H
#include "stdint.h"
void mortpwm_Init(void);
void MORT_SetCompare1(uint16_t Compare);
void MORT_SetCompare2(uint16_t Compare);
#endif
五、测速结果
经过一定时间速度达到2.5圈每秒,可给电机添加一定阻力减缓运转速度,通过pid调控后会加大pwm输出,从而调控其速度再次达到所设定值。
关于测速篇可看:
测c基于stm32F103实现MH-Sensor红外对射模块加测速码盘进行测速
源代码:链接: 通过百度网盘分享的文件:对射式红外传感器…
链接:https://pan.baidu.com/s/1bN8mKGs-qY6nfrjemnctpA?pwd=nxmx
提取码:nxmx
复制这段内容打开「百度网盘APP 即可获取」