一、问题
在安装软件包过程中输入以下命令:
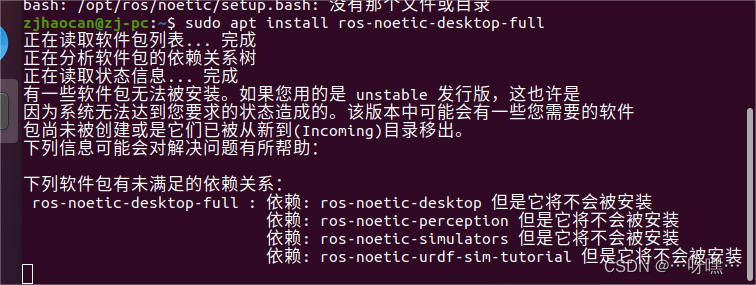
sudo apt install ros-noetic-desktop-full
出现了以下报错:
下列软件包有未满足的依赖关系:
ros-noetic-desktop-full:依赖:ros-noetic-desktop 但是它将不会被安装
我直接从换源的步骤重新开始安装的。
二、搭建ROS环境
2.1 换源
打开“软件和更新”,进行下列操作,点击“下载自”,选择“中国”,更换为阿里云的镜像源:
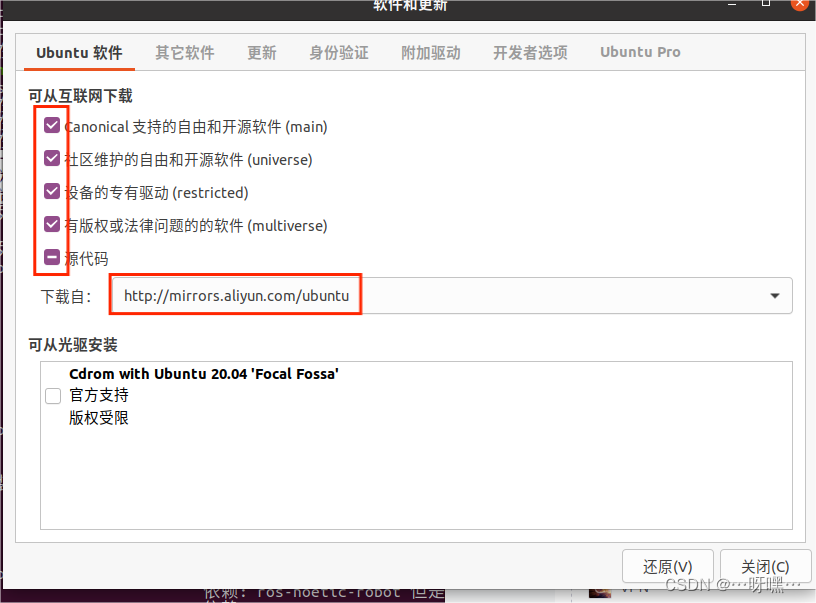
如果出现以下问题,点击“重新载入”即可。

2.2 设置软件源
打开终端(Crtl+Alt+t)输入以下命令,更换为中科大源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'

2.3 设置密钥
输入以下命令:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
2.4 更新软件包列表
sudo apt update
2.5 安装软件包
安装桌面完整版。需要注意Ubuntu18.04为melodic,Ubuntu20.04为noetic,Ubuntu16.04的ros为kinetic。
sudo apt install ros-noetic-desktop-full
选择“y”,进行下载和解包。
后面需要等待很长一段时间,不要着急。
完成了。
2.6 设置环境变量
$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc

2.7 安装roinstall
$ sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
三、检验
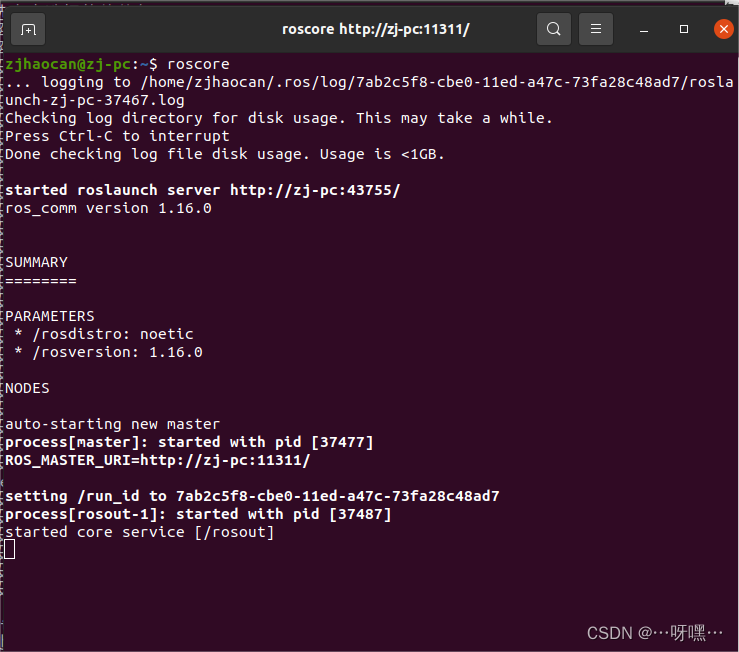
打开一个终端输入
roscore
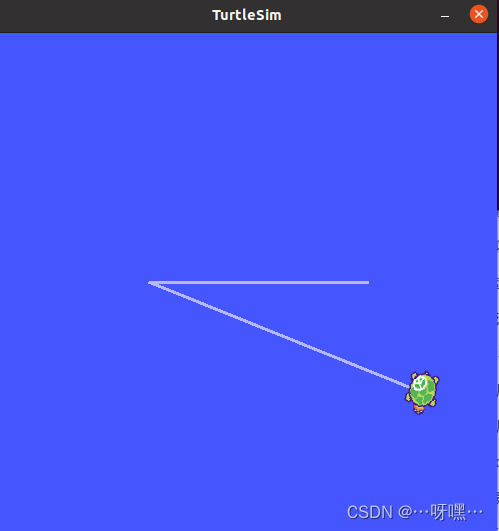
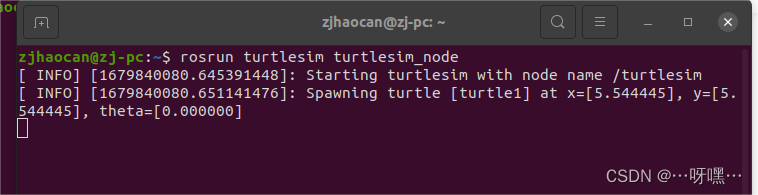
打开第二个终端输入以下代码,此时会出现一个乌龟。
$ rosrun turtlesim turtlesim_node
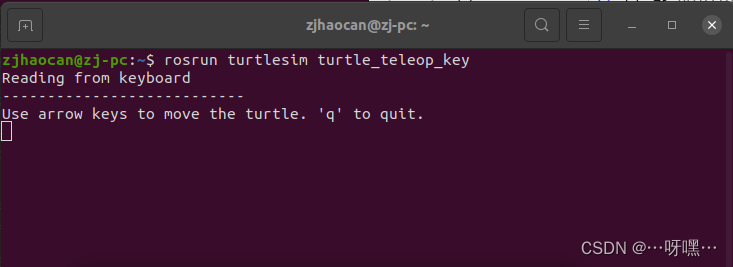
打开第三个终端,输入以下命令,就能够通过键盘控制乌龟的移动。
$ rosrun turtlesim turtle_teleop_key
参考:
https://blog.csdn.net/m0_55879913/article/details/127298691
https://blog.csdn.net/weixin_36139431/article/details/124786709